Post Syndicated from Михаил Ангелов original https://www.toest.bg/nauchni-novini-voyager-payazhini-i-regeneratsiya-na-krainitsi/
Далечна диагностика

Програмата „Вояджър“ е най-продължителната мисия на NASA. Далечните сонди все още изпращат информация и ни вълнуват с премеждията си в дълбокия Космос. Макар и да е впечатляващо колко добре се държат двата апарата предвид възрастта си, за съжаление, с напредване на времето състоянието им се влошава и все по-често се налагат намеси от екипа инженери, който работи с тях. В последните няколко месеца към пътешествениците бяха изпратени редица команди, за да осигурят още интригуващи новини.
Апаратите се захранват от специални модули, които превръщат в електрическа енергия топлината, отделена при разпада на радиоактивни елементи (в случая плутоний). Въпреки че мощността им не е особено голяма, те са предпочитани за подобен тип мисии, тъй като са надеждни поради сравнително простата си конструкция. Годишно източникът губи около 4 вата, което не е пречка за основната им мисия, приключваща в края на 1989 г. Но удължаването ѝ налага постепенно изключване на различни научни инструменти поради намаляването на енергийните ресурси – миналата година това стана с уреда, измерващ количеството и посоката на заредени частици (плазма) на „Вояджър 2“.
В началото на март бяха изключени още два инструмента – измерващият космически лъчи на „Вояджър 1“ и засичащият заредени частици с ниска енергия на „Вояджър 2“. И двата са поставени на платформи, които се въртят, така че да осигуряват пълно измервателно поле. Задвижващите ги мотори са изпитани да издържат 500 000 стъпки – достатъчно, за да осигурят нормална работа на инструментите до прелитането на „Вояджър 2“ покрай Сатурн през август 1980 г. Към момента на изключването си те вече са направили над 8,5 млн. стъпки – 17 пъти повече от предвиденото.
Тъй като данните, които събират апаратите, са уникални, екипът на NASA се опитва да отложи изключването на научните инструменти, но за съжаление, това е неизбежно. През идната година всеки от двата апарата ще загуби по още един инструмент, което би трябвало да им даде възможност да функционират с поне по един аналитичен уред и след 2030 г.

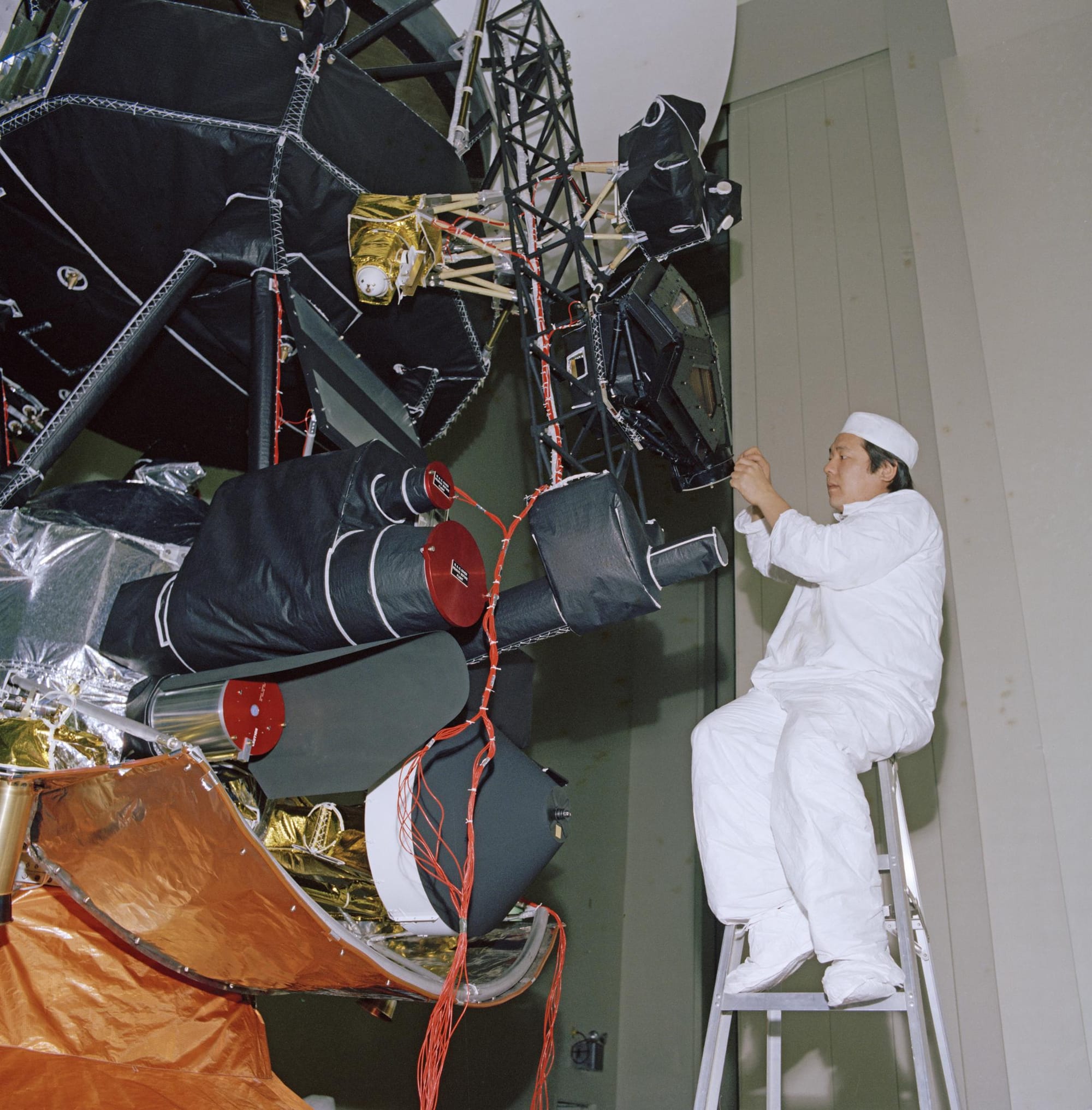

Моменти от изграждането на апаратите „Вояджър“. Снимки: NASA
От дълбокия Космос пристигат и добри новини. Сондите са оборудвани с няколко набора двигатели, които променят ориентацията им в пространството. Освен за изпълняване на преките задачи на апаратите това е важно и за точното им позициониране и комуникация със Земята. Два от наборите двигатели позволяват завъртането им, така че сондите да могат да държат навигационните си инструменти насочени към конкретно избрани звезди. Поради проблем с нагревателните им елементи основните двигатели на „Вояджър 1“ спират да работят през 2004 г., но специалистите не го отчитат като особен проблем, защото резервните функционират нормално и навигационните маневри могат да се поверят на тях.
Това от своя страна води до други проблеми, които тогава може би са преценени като прекалено далечни. С времето по тръбите, провеждащи гориво до двигателите, се натрупват остатъци, които стесняват диаметъра им и могат да доведат до пълно запушване. За забавяне на процеса екипът на NASA започва да използва и другите двигатели на апарата – те нямат възможност за завъртане на апарата около оста му, но поне могат да правят малките корекции, нужни за насочване на антената към Земята. С едно от последните обновявания на софтуера беше разредено и времето между включването на двигателите.
Все пак рискът „Вояджър 1“ да остане без завъртането си кара инженерите да направят нов анализ на проблема с нагревателите на основния двигател. Оказва се, че най-вероятно ситуацията е тривиална – някой от ключовете, които контролират захранването на двигателите, е в грешна позиция.
Но проверяването на хипотезата не е толкова лесно. За целта двигателите трябва да бъдат активирани, след което да започне работата по проучване и евентуално по възстановяване на нагревателите. Това крие известен риск – ако сондата се отклони значително, автоматичната система за навигация ще включи двигателите, което би довело до малка експлозия, в случай че нагревателите не функционират. Ситуацията се усложнява и заради планов ремонт на голямата антена в Австралия, с помощта на която се осъществява комуникацията с апарата. Тя почти няма да работи до май 2026 г. Поради това инженерите искат основните двигатели да са активни за краткия прозорец през август, когато ще получат данни от „Вояджър 1“ и ще могат да изпратят нови инструкции до апарата.
Така в края на март специалистите активират основния двигател и изпращат командите, които би трябвало да включат нагревателите. Два дни по-късно (сондата е на почти един светлинен ден от Земята) получават телеметрични данни, които показват повишаване на температурата в нагревателите.
Това е поредният случай на почти невероятно спасяване на някоя от системите на дълголетните апарати и показва изключителното ниво на инженерите, които са ги проектирали навремето, както и на тези, които работят с тях в момента. Може да се надяваме, че въпреки зачестяващите премеждия двете сонди ще продължат да носят вести от дълбокия Космос. Към момента се предполага, че радиоактивната батерия на „Вояджър 1“ ще издържи още около 10 години, но ако съдим по досегашния си опит с „Вояджър“, е много вероятно да ни очакват изненади.
Футуристични влакна
Паяжините са впечатляващи творения, които освен насекоми пленяват и нашето въображение със своята изящност. Те са продукт на сложен биологичен процес, започващ със синтеза на специализирани протеини в жлезите на паяците. От тези протеини после се предат влакна със специфични свойства – здрави и еластични за основата на мрежата; леки – използвани за парашут; и лепкави – за улавяне на плячка. Поради изключителната си якост, по-висока от тази на стоманата, някои от нишките имат огромен потенциал за приложение в редица индустрии. Плат, изработен от тях, би могъл да бъде използван за най-различни бронезащитни изделия; въжета, изплетени от тях, ще са по-леки и по-здрави от стоманените. Медицината също е поле, което би имало полза от подобен материал – от нишките може да се направят конци, сухожилия или специални марли и бинтове.
Пречка за разгръщане на този потенциал е липсата на масово производство на паяжина. Паяците са изключително трудни за отглеждане, а събраната паяжина е в малки количества. За справяне с това през годините са предлагани различни решения, като може би най-куриозното беше генетично модифицирани кози, които експресират в млякото си протеините, изграждащи паяжините. Тъй като отделянето на протеините е сложен процес, а и обществената реакция беше доста критична, този подход не се наложи. Интересен вариант е представен в публикация от 2023 г. – създаване на копринени буби, които отделят чисти паяжинови нишки, готови за употреба.
Изненадващото е, че доскоро нямаше разработена процедура за генетична манипулация на паяци. Най-вероятно това се дължи на по-трудното им отглеждане и манипулиране. Наскоро германски учени публикуваха статия за първите генно редактирани паяци. Подходът, на който са се спрели, е инжектирането на конструкта, носещ CRISPR/Cas9, в хемолимфата на неоплодени женски паяци. По този начин той се разпространява в тялото им, достига ооцитите (развиващите се женски полови клетки) и редактира техния геном. След чифтосване с мъжки паяк част от потомството на женската би трябвало да носи редактираните гени.
За да изпита работата на системата, екипът първо се спира на по-лесната модификация – нарушаване на функционирането на добре известен ген. Избран е sine oculis – ген, регулиращ развитието на очите на паяците, тъй като загубата му не е летална за животните, а полученият фенотип (промяната във външния вид) е лесно забележима. След извършване на процедурата в потомството на редактираните майки се наблюдават различни степени на проблеми с развитието на очите – от грешна форма до пълната им липса. С това учените доказват, че sine oculis наистина е регулатор на генната каскада, отговорна за формирането на очите. Интересното е, че при всички редактирани паяци лещата на очите присъства, което означава, че тя е под контрола на друг регулаторен ген. Промените показват също, че системата за редакция работи и може да се приложи и за други намеси в генома на паяците. След като доказват това, учените започват по-вълнуващата част от работата си – вмъкването на нов ген.

Съставът на нишката, която служи за изграждане на опорните и радиалните нишки на паяжината, е добре проучен. Главните компоненти са два протеина – единият с високо, а другият с ниско съдържание на аминокиселината пролин, като първият придава еластичност, а вторият – здравина. И двата протеина в краищата си имат участъци, които нямат участие във функцията на нишките, а служат за определяне на тяхната структура по време на съхранението и изплитането им. Именно там е подходящо да се вмъкне парче ДНК, което не нарушава тази функция, но добавя белтъчна структура, способна да флуоресцира в червен цвят.
След третиране на женските паяци и получаване на потомство учените виждат, че експериментът им е успешен – нишките, които изплитат паяците, са белязани с добавеното багрило. При дисекция на паяците флуоресценцията се наблюдава и в самите жлези, отговорни за произвеждането на този тип нишки. Още повече, редакцията е стабилна и присъства и в потомството на модифицираните паяци, което също носи червения протеин.
Положителните резултати означават, че вече има ясен протокол за генетични редакции на паяци, което отваря възможности както за фундаментални, така и за по-практично насочени проучвания. Например промяната на свойствата на паяжината може да бъде основа за нови материали или технологии. Въпреки че звучи леко фантастично, сходно приложение е вмъкването на багрила в нишките на копринените буби, за да се премахне нуждата от допълнително оцветяване на платовете, което често се прави с токсични химикали и голямо количество вода. Стъпка към това е проект, започнал в началото на месеца. Целта е да се създаде термостабилен син хромопротеин, базиран на хромопротеина от корала обикновена актиния, който може да се използва за багрене на тъкани.
Тайните на аксолотлите
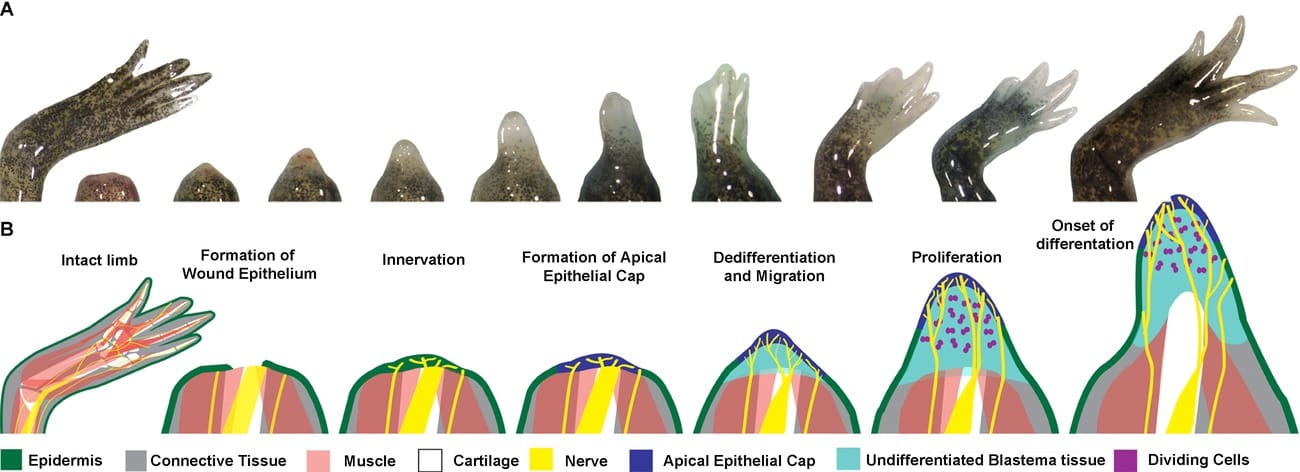
Способността на саламандъра аксолотъл за възстановяване на наранени органи е впечатляваща – симпатичните животни могат да регенерират сложни части от тялото си, например опашка и крайници. За процеса вече се знае много – първо се образува т.нар. бластема от дедиференцирани клетки (клетки, които се връщат към състояние на стволови и могат да се развият като всеки вид тъкан). След това от бластемата се формира „пъпка“, от която започва да израства крайникът, като за това е важно участъкът да има запазена нервна тъкан. А за координацията на тези стъпки отговаря молекула, производна на витамин А (ретиноева киселина).
Но как бластемата „разбира“ точно коя част от крайника трябва да пресъздаде? На този въпрос отговаря ново изследване, публикувано в журнала Nature Communications.
Текущата хипотеза е, че в различните участъци на крайниците се произвеждат различни количества ретиноева киселина, което насочва клетките на бластемата към това коя част от крайника липсва. Оказва се, че предположението е донякъде вярно – концентрацията на киселината наистина определя развитието на конкретни части, но това става не чрез промени в синтезираното количество, а с разграждането ѝ в различна степен.
Клетките в крайната част на регенерирания орган (например китката) произвеждат много голямо количество от ензим (CYP26B1), който има способността да разгражда ретиноевата киселина. Обратно – в раменния пояс ензимът почти не се произвежда. Така чрез разрушаването на киселината се създава градиент на концентрацията ѝ от рамото към китката, който помага на стволовите клетки да „се ориентират“ в пространството.
За да потвърдят откритието си, учените провеждат прост експеримент. След ампутация на крайника на саламандъра при китката, участъкът се третира с медикамента таларозол, който има свойството да нарушава работата на ензима CYP26B1. Така ретиноевата киселина не се разгражда и може да се натрупа в големи количества. И наистина, животните регенерират от китката си цял крайник, сякаш са го загубили от рамото си. Това ясно доказва, че действието на ензима и количеството ретиноева киселина ръководят процеса на възстановяване.
Опитвайки се да вникнат по-дълбоко в молекулярните механизми на регулация на процеса, учените разглеждат нивата на експресия на различни гени в крайника на земноводните и установяват, че с покачване на нивата на ретиноева киселина се повишава и активността на гена SHOX (short-stature homeobox gene). Той се среща и при човека и също отговаря за регулацията на крайниците, като при нарушения на функцията му се уврежда развитието им. Това се наблюдава и при аксолотли, в които генът е изключен с помощта на CRISPR. „Дланите“ се развива нормално, но горната част на крайника е скъсена. Интересното е, че присъствието на гена не е нужно за изграждането на нов крайник.
Откритието е важна стъпка към разплитането на мистерията как протича и как се регулира процесът на регенерация, въпреки че остават много отворени въпроси. Например от това изследване не става ясно какъв е механизмът за засичане на по-ниска концентрация на ретиноева киселина – SHOX се експресира предимно в основата на крайниците.
Към момента основната спънка пред регенерацията на органи при хора е създаването на бластема. Но ако учените успеят да открият начин да го направят възможно, познаването на процесите, които протичат след това, ще бъде безценно. Ето защо всеки пробив в опознаването на сигналните пътища, които ги регулират, е окуражаващ.