Ten years ago, we launched our bug bounty program in partnership with HackerOne. Beyond a security initiative, it represented an open invitation to collaborative development.
As pioneers in Southeast Asia, we began the program with 23 initial researchers, and it has since evolved into a global community of security researchers.
The strategic structure and scope of our Bug Bounty Program, combined with our continuous innovation and experimentation, have successfully captured the attention of the global security research community. Over the past decade, we have partnered with more than 850 active security researchers from HackerOne’s community of over 2 million cybersecurity professionals worldwide. These dedicated researchers work alongside us across borders and time zones, forming a collaborative defense network that helps protect over 187 million users throughout Southeast Asia. Their ongoing participation demonstrates both the maturity of our program and the trust we’ve built within the security research community.
This milestone reflects the strength of shared purpose and our sustained partnership with the HackerOne platform. It demonstrates the value of human connection and the collective understanding that security is stronger through collaboration. Here’s to a decade of partnership and to many more years of building a safer future, one collaboration at a time!
Figure 1. Ten years of achievements with our HackerOne partnership.
Evolution and growth: Adapting to a dynamic threat landscape
Over the past ten years, our program has consistently adapted to the dynamic threat landscape and integrated invaluable feedback from our research community. We have grown from a private initiative to a program that consistently ranks among the top 20 worldwide and among the top 3 in Asia on HackerOne. Key milestones from our journey include:
Expanding our horizons: Our scope significantly broadened in 2023-2024, continuously adding new assets and prominently including financial services in Indonesia and AI systems. This expansion provides researchers with more avenues to contribute to Grab’s security.
Focused mobile security: We introduced a dedicated bounty table for mobile-specific issues, recognizing the unique challenges of mobile security.
Incentivizing excellence: We regularly experiment with campaigns of various types and targets, diversifying our reward methods to include both financial rewards and recognition.
Evolving vulnerability focus: We’ve observed a significant shift in the types of vulnerabilities reported over the decade, moving from foundational issues in early years to more sophisticated and emerging categories recently.
Figure 2. The journey of our bug bounty program.
The global stage: Connecting with the best
Our program’s success is deeply rooted in its vibrant global community, which we actively foster through continuous engagement. Our strategy extends beyond the platform to major live hacking events, including the ThreatCon Live Hacking Event 2023in Nepal and DEFCON 32’s Live Recon Village 2024 in Las Vegas. These initiatives have been instrumental in connecting us with a diverse pool of new talent and strengthening relationships with researchers across different continents. By meeting hackers where they are, we’ve not only brought new expertise into our ecosystem but also demonstrated our commitment to being an accessible and collaborative partner on a global scale.
The high participation and quality submissions from these events demonstrate the effectiveness of this approach. They’ve expanded our global security testing coverage and strengthened our standing within the worldwide cybersecurity community. Through ongoing interactions and submitted reports, we continue to see that security is a collaborative effort with no borders.
Exclusive anniversary celebrations: Global club campaigns
To commemorate our 10th anniversary, we launched three exclusive, invite-only campaigns with HackerOne’s regional clubs in Germany, Morocco, and India. These campaigns served as cultural exchanges, bringing fresh perspectives from outside our core Southeast Asian consumer markets. By engaging with these clubs, we expanded our researcher community and connected with security experts who understand different threat landscapes and methodologies, bringing outside perspectives to our systems.
In August, we also ran a broader anniversary campaign that drew significant participation from the researcher community, resulting in 461 submissions. xchopath was awarded the Best Hacker Bonus for their contributions during this campaign.
These campaigns expanded our global security testing coverage and strengthened relationships with international researcher communities. Beyond vulnerability reports, they functioned as knowledge-sharing initiatives. We connected directly with researchers to learn from their experience and feedback, creating a continuous loop of improvement. This international collaboration also informed our global expansion security strategy by providing insights into how different regions approach digital payments and authentication.
The anniversary campaigns allowed us to validate our security frameworks against diverse regulatory environments and advanced testing methodologies from established security markets, reinforcing our commitment to maintaining robust security standards.
Voices from our community
Behind every vulnerability report is a researcher who chose to help make Grab safer. Their perspectives reveal the human side of our security evolution. These individuals are not just cybersecurity experts; they are partners in our mission to protect millions of users and ensure a safe digital environment. Here are a few testimonies from participants in our past campaigns:
“The triage was very fast despite the time difference, which I really appreciated. The triaging experience was better than other programs. The huge scope and business portal with different user roles made it especially interesting to explore.” – ArtSec[H1 Germany club campaign participant]
“I liked that different countries have different features—this gives me more attack surface to explore. Response time was great, triage was very fast, and I appreciated Grab’s effort in providing fast responses. The scope was huge with a lot of wildcards for reconnaissance.” – Sicksec[H1 Morocco club campaign participant]
“More than 20 bugs were reported, and was particularly happy that bounties were being paid upon triage. The Germany team spent a lot of time on the educational part, especially for newcomers. Communication overall was very good, and the immediate response even outside working hours was really cool. SSO and authentication is my expertise and I liked that aspect of exploring the platform.” – Lauritz[H1 Germany club campaign participant]
The road ahead: Our commitment to a secure future
With a strong community of security researchers across countries and a decade of collaboration, we’ve built meaningful partnerships. Every vulnerability report represents trust, and every discovery reflects dedication to our shared mission. The program demonstrates our choice to build together rather than work in isolation, to protect rather than exploit, and to collaborate rather than compete.
While we celebrate our external community, the success of our program relies equally on our dedicated internal teams. Our cybersecurity teams form the operational foundation of this initiative. Their consistent responsiveness and researcher-focused approach have enabled vulnerability reporting to evolve into a genuine partnership, maintaining researcher trust and keeping Grab secure.
The next ten years will bring challenges we can’t yet imagine, from emerging threats in artificial intelligence to novel cryptographic approaches in a quantum-powered world. We will face them together as a community that spans cultures, time zones, and expertise.
Together, we’ll continue securing Southeast Asia’s digital future, one partnership, one discovery, one shared achievement at a time.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility, and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people every day to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
In today’s data-driven landscape, monitoring data quality has become a critical need for ensuring reliable and efficient data usage across domains. High-quality data is the backbone of AI innovation, driving efficiency and unlocking new opportunities. As decentralized data ownership grows, the ability to effectively monitor data quality is essential for maintaining reliability in data systems.
Kafka streams, as a vital component of real-time data processing, play a significant role in this ecosystem. However, unreliable data within Kafka streams can lead to errors and inefficiencies for downstream users, and monitoring the quality of data within these streams has always been a challenge. This blog introduces a solution that empowers stream users to define a data contract, specifying the rules that Kafka stream data must adhere to. By leveraging this user-defined data contract, the solution performs automated real-time data quality checks, identifies problematic data as it occurs, and promptly notifies stream owners. This ensures timely action, enabling effective monitoring and management of Kafka stream data quality while supporting the broader goals of data mesh and AI-driven innovation.
Problem statement
In the past, monitoring Kafka stream data processing lacked an effective solution for data quality validation. This limitation made it challenging to identify bad data, notify users in a timely manner, and prevent the cascading impact on downstream users from further escalating.
Challenges in syntactic and semantic issue identification:
Syntactic issues: Refers to schema mismatches between producers and consumers, which can lead to deserialization errors. While schema backward compatibility can be validated upon schema evolution, there are scenarios where the actual data in the Kafka topic does not align with the defined schema. For example, this can occur when a rogue Kafka producer is not using the expected schema for a given Kafka topic. Identifying the specific fields causing these syntactic issues is a typical challenge.
Semantic issues: Refers to inconsistencies or misalignments between producers and consumers about the expected pattern or significance of each field. Unlike Kafka stream schemas, which act as a data structure contract between producers and consumers, there is no existing framework for stakeholders to define and enforce field-level semantic rules, for example, the expected length or pattern of an identifier.
Timeliness challenge in data quality monitoring: There is no real-time mechanism to automatically validate data against predefined rules, timely identify quality issues, and promptly alert stream stakeholders. Without real-time stream validation, data quality issues can sometimes persist for periods of time, impacting various online and offline downstream systems before being discovered.
Observability challenge for troubleshooting bad data: Even when problematic data is identified, stream users face difficulties in pinpointing the exact “poison data” and understanding which fields are incompatible with the schema or violate semantic rules. This lack of visibility complicates Root Cause Analysis and resolution efforts.
Solution
Our Coban platform offers a standardized data quality test and observability solution at the platform level, consisting of the following components:
Data Contract Definition: Enables Kafka stream stakeholders to define contracts that include schema agreements, semantic rules that Kafka topic data must comply with, and Kafka stream ownership details for alerting and notifications.
Automated Test Execution: Provides a long running Test Runner to automatically execute real-time tests based on the defined contract.
Real-time Data Quality Issue Identification: Detects data issues at both syntactic and semantic levels in real-time.
Alerts and Result Observability: Alerts users, simplifying observation of data quality issues via the platform.
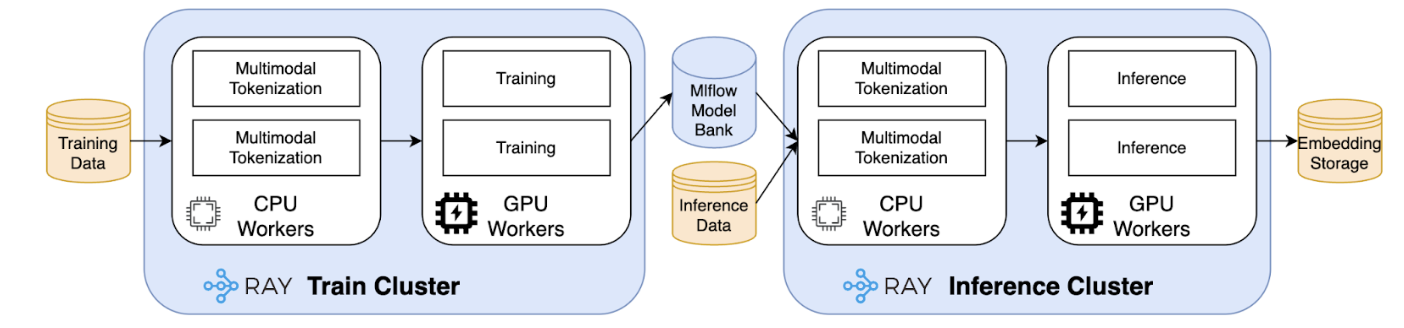
Architecture details
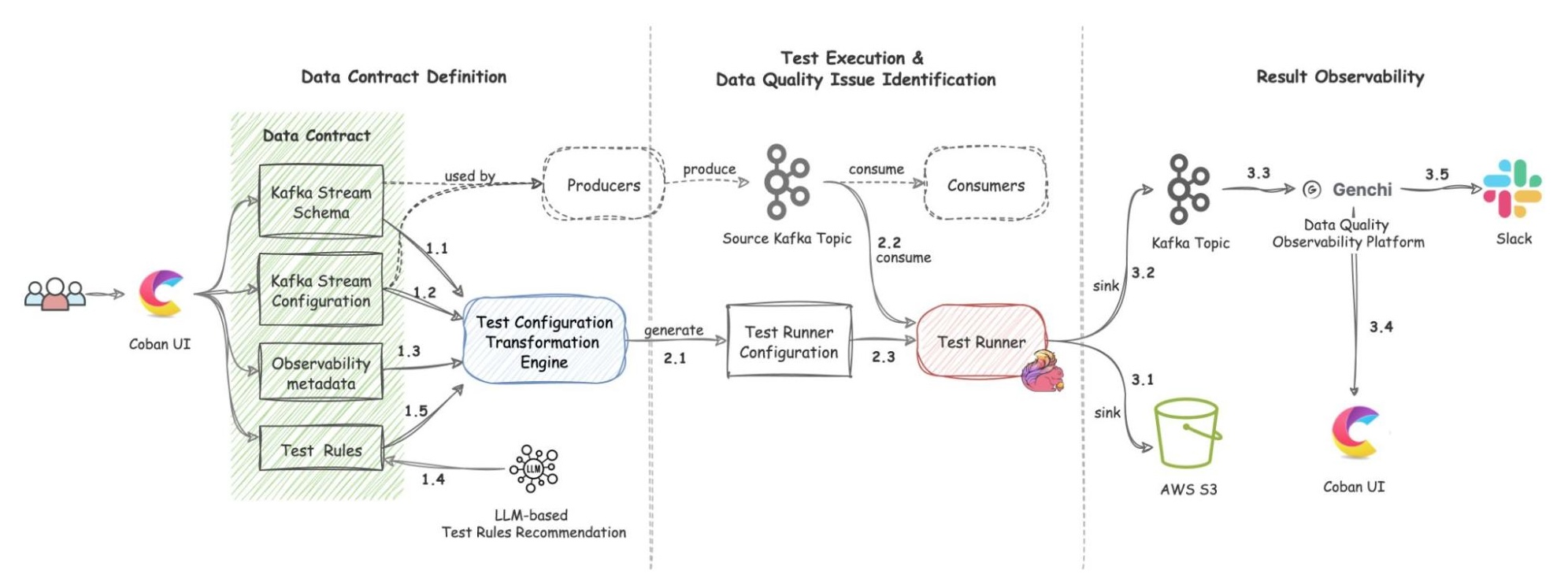
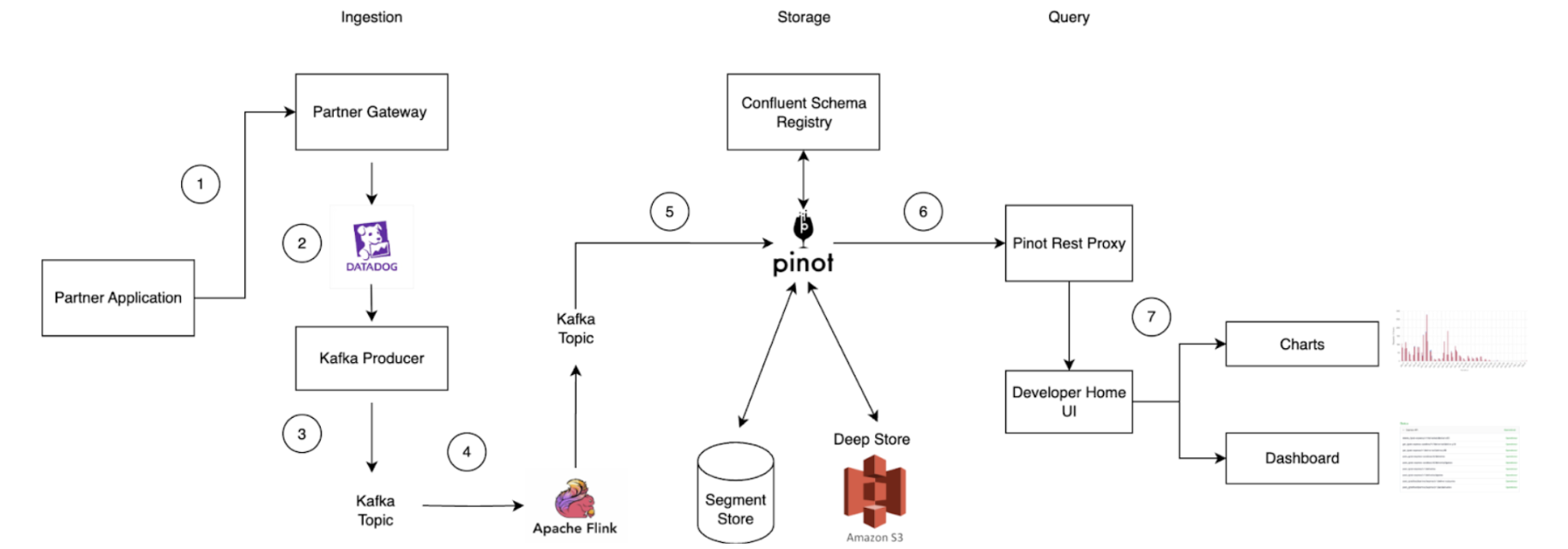
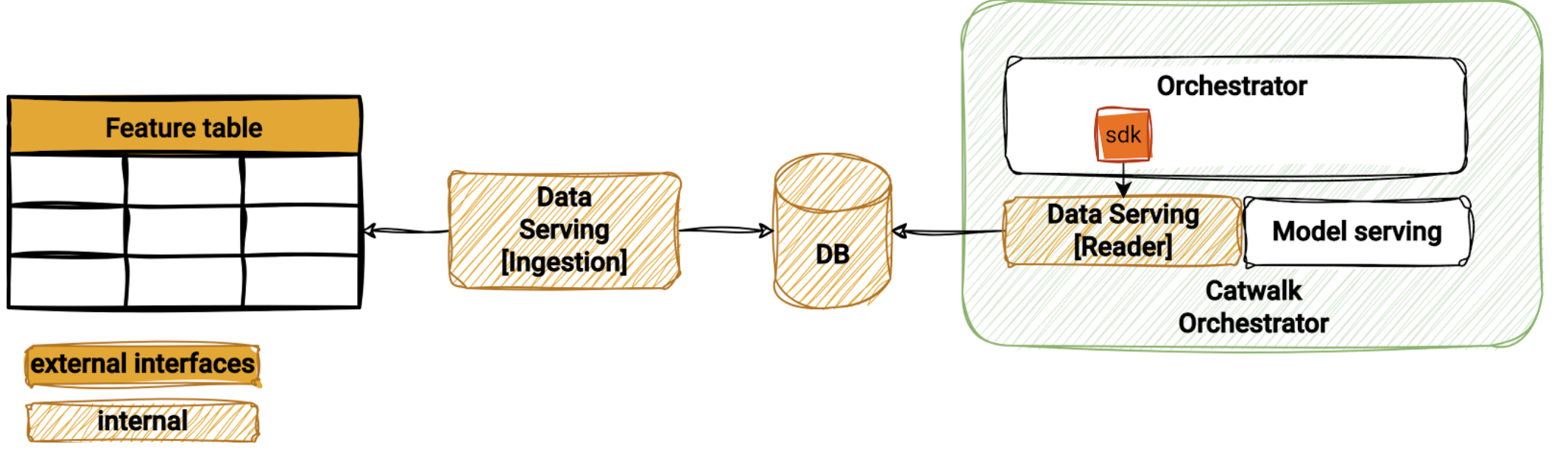
The solution includes three components: Data Contract Definition, Test Execution & Data Quality Issue Identification, and Result Observability as shown in the architecture diagram in figure 1. All mentions of “Flow” from here onwards refer to the corresponding processes illustrated in figure 1.
Figure 1. Real-time Kafka Stream Data Quality Monitoring Architecture diagram.
Data Contract Definition
The Coban Platform streamlines the process of defining Kafka stream data contracts, serving as a formal agreement among Kafka stream stakeholders. This includes the following components:
Kafka Stream Schema: Represents the schema used by the Kafka topic under test and helps the Test Runner to validate schema compatibility across data streams (Flow 1.1).
Kafka Stream Configuration: Encompasses essential configurations such as the endpoint and topic name, which the platform automatically populates (Flow 1.2).
Observability Metadata: Provides contact information for notifying Kafka stream stakeholders about data quality issues and includes alert configurations for monitoring (Flow 1.3).
Kafka Stream Semantic Test Rules: Empowers users to define intuitive semantic test rules at the field level. These rules include checks for string patterns, number ranges, constant values, etc. (Flow 1.5).
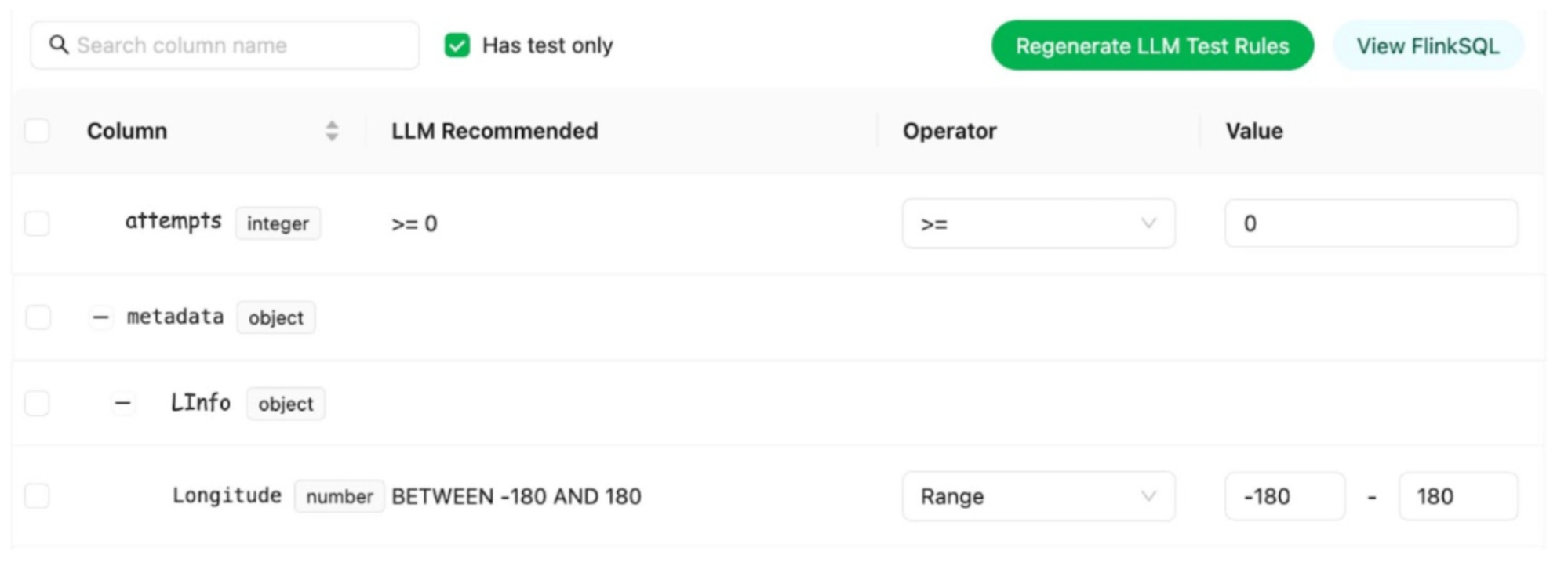
LLM-Based Semantic Test Rules Recommendation: Defining dozens if not hundreds of field-specific test rules can overwhelm users. To simplify this process, the Coban Platform uses LLM-based recommendations to predict semantic test rules using provided Kafka stream schemas and anonymized sample data (Flow 1.4). This feature helps users set up semantic rules efficiently, as demonstrated in the sample UI in figure 2.
Figure 2. Sample UI showcasing LLM-based Kafka stream schema field-level semantic test rules. Note that the data shown is entirely fictional.
Data Contract Transformation
Once defined, the Coban Platform’s transformation engine converts the data contract into configurations that the Test Runner can interpret (Flow 2.1). This transformation process includes:
Kafka Stream Schema: Translates the schema defined in the data contract into a schema reference that the Test Runner can parse.
Kafka Stream Configuration: Sets up the Kafka stream as a source for the Test Runner.
Observability metadata: Sets contact information as configurations of the Test Runner.
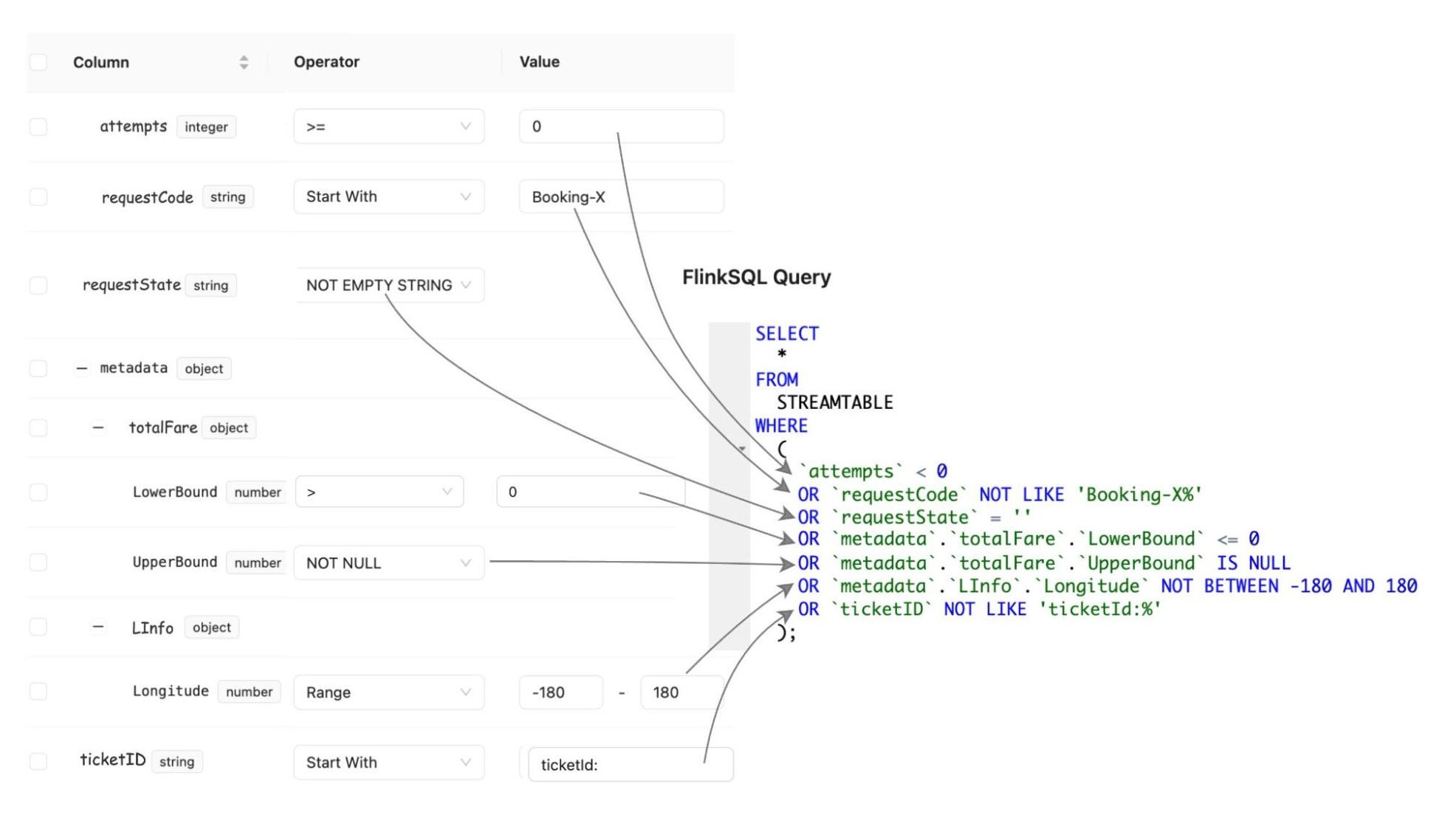
Kafka Stream Semantic Test Rules: Transforms human-readable semantic test rules into an inverse SQL query to capture the data that violates the defined rules.
Figure 3. Illustration of semantic test rules being converted from human-readable formats into inverse SQL queries.
Test Execution & Data Quality Issue Identification
Once the Test Configuration Transformation Engine generates the Test Runner configuration (Flow 2.1), the platform automatically deploys the Test Runner.
Test Runner
The Test Runner utilises FlinkSQL as the compute engine to execute the tests. FlinkSQL was selected for its flexibility in defining test rules as straightforward SQL statements, enabling our platform to efficiently convert data contracts into enforceable rules.
Test Execution Workflow And Problematic Data Identification
FlinkSQL consumes data from the Kafka topic under test (Flow 2.2) using its own consumer group, ensuring it doesn’t impact other consumers. It runs the inverse SQL query (Flow 2.3) to identify any data that violates the semantic rules or that is syntactically incorrect in the first place. Test Runner captures such data, packages it into a data quality issue event enriched with a test summary, the total count of bad records, and sample bad data, and publishes it to a dedicated Kafka topic (Flow 3.2). Additionally, the platform sinks all such data quality events to an AWS S3 bucket (Flow 3.1) to enable deeper observability and analysis.
Result Observability
Grab’s in-house data quality observability platform, Genchi, consumes problematic data captured by the Test Runner (Flow 3.3).
Alerting
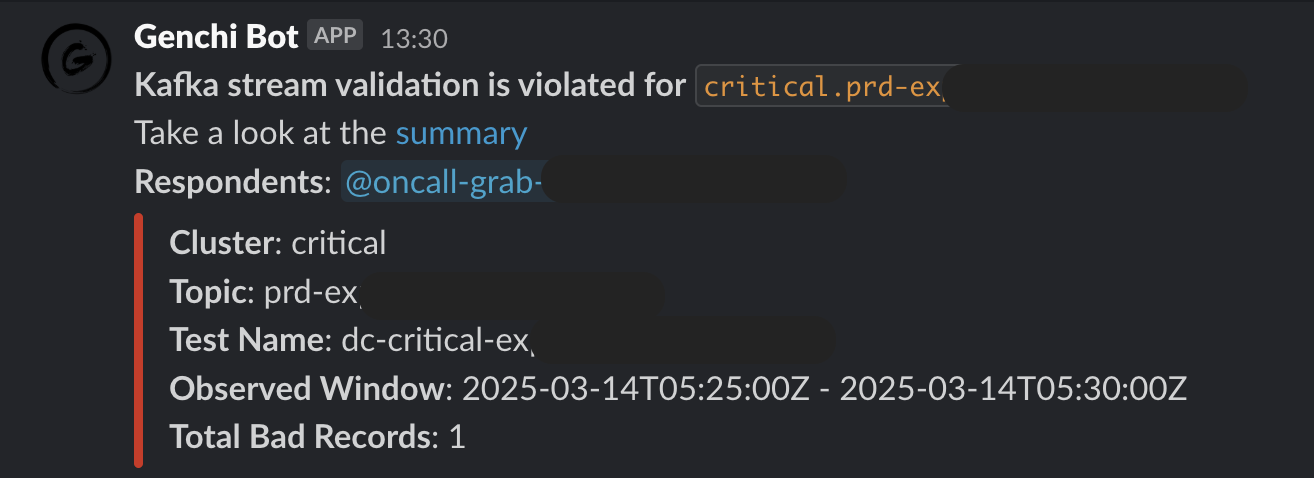
Genchi sends Slack notifications (Flow 3.5) to stream owners specified in the data contract observability metadata. These notifications include detailed information about stream issues, such as links to sample data in Coban UI, observed windows, counts of bad records, and other relevant details.
Figure 4. Sample Slack notifications
Observability
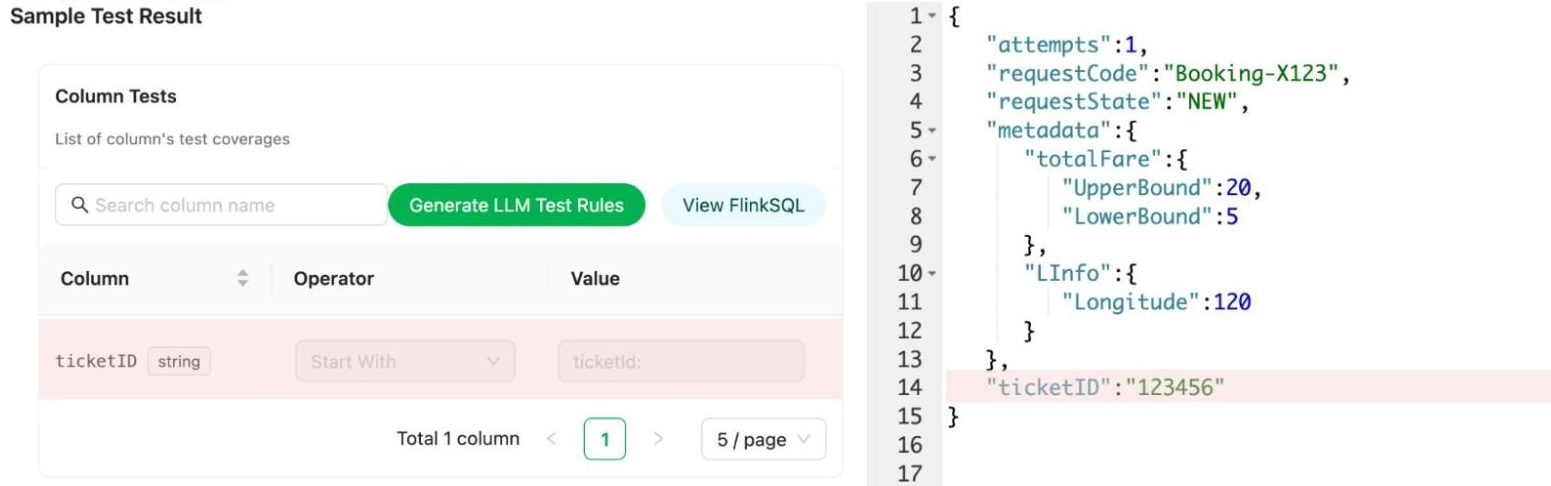
Users can access the Coban UI (Flow 3.4), displaying Kafka stream test rules and sample bad records, highlighting fields and values that violate rules.
Figure 5. In this Sample Test Result, the highlighted fields indicate violations of the semantic test rules.
Impact
Since its deployment earlier this year, the solution has enabled Kafka stream users to define contracts with syntactic and semantic rules, automate test execution, and alert users when problematic data is detected, prompting timely action. It has been actively monitoring data quality across 100+ critical Kafka topics. The solution offers the capability to immediately identify and halt the propagation of invalid data across multiple streams.
Conclusion
We implemented and rolled out a solution to assist Grab engineers in effectively monitoring data quality in their Kafka streams. This solution empowers them to establish syntactic and semantic tests for their data. Our platform’s automatic testing feature enables real-time tracking of data quality, with instant alerts for any discrepancies. Additionally, we provide detailed visibility into test results, facilitating the easy identification of specific data fields that violate the rules. This accelerates the process of diagnosing and resolving issues, allowing users to swiftly address production data challenges.
What’s next
While our current solution emphasizes monitoring the quality of Kafka streaming data, further exploration will focus on tracing producers to pinpoint the origin of problematic data, as well as enabling more advanced semantic tests such as cross-field validations. Additionally, we aim to expand monitoring capabilities to cover broader aspects like data completeness and freshness, and integrate with Gable AI to detect Data Transfer Object (DTO) changes and semantic regressions in Go producers upon committing code to the Git repository. These enhancements will pave the way for a more robust, multidimensional data quality testing solution across a wider range.
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
At Grab, innovation isn’t just about building new features; it’s about evolving our platforms to meet the changing needs of our users and the broader technological landscape. SpellVault, our internal AI platform, exemplifies this philosophy. When SpellVault was first launched, our vision was straightforward: empower everyone at Grab to effortlessly build and manage AI-powered apps without the need for coding. Built on the principles of Retrieval-Augmented Generation (RAG) and enhanced by plugin support, SpellVault rapidly evolved into a powerful productivity engine for the organization, enabling the creation of thousands of apps that drive automation, foster experimentation, and support production use cases.
As the AI landscape has evolved, SpellVault has grown alongside it. Initially launched as a straightforward no-code app builder for Large Language Models (LLMs), it has now evolved into a cutting-edge platform that embraces the agentic future—a future where AI goes beyond generating responses to reasoning, acting, and dynamically adapting through the use of tools and contextual understanding.
This article outlines SpellVault’s journey towards an agentic future and how we empower users to build AI Agents that are smarter, more adaptable, and ready for the future.
A no-code platform for building LLM apps
SpellVault was founded with a clear mission: to democratize access to AI for everyone at Grab, regardless of their technical expertise. Initially launched as a no-code LLM app builder, the platform was built on a foundation of RAG pipelines and basic plugin support.
Early on, we recognized that the true potential of AI apps extends beyond the capabilities of language models alone. Their real value lies in the ability to seamlessly interact with external systems and diverse data sources. This insight drove our commitment to minimizing barriers and ensuring users could access data from various sources with ease. From the very beginning, we centered our efforts on three key focus areas:
Comprehensive RAG solution with useful integrations
From the start, the SpellVault team prioritized enabling users to enhance their LLM apps with data through RAG. Rather than solely relying on the LLM’s internal information, we wanted the apps to ground their responses in up-to-date, contextually relevant, and factual information. SpellVault has built-in integrations with knowledge sources such as Wikis, Google Docs, as well as plain text and PDF uploads. These capabilities empower users to build assistants that reference relevant knowledge and provide more accurate, verifiable answers.
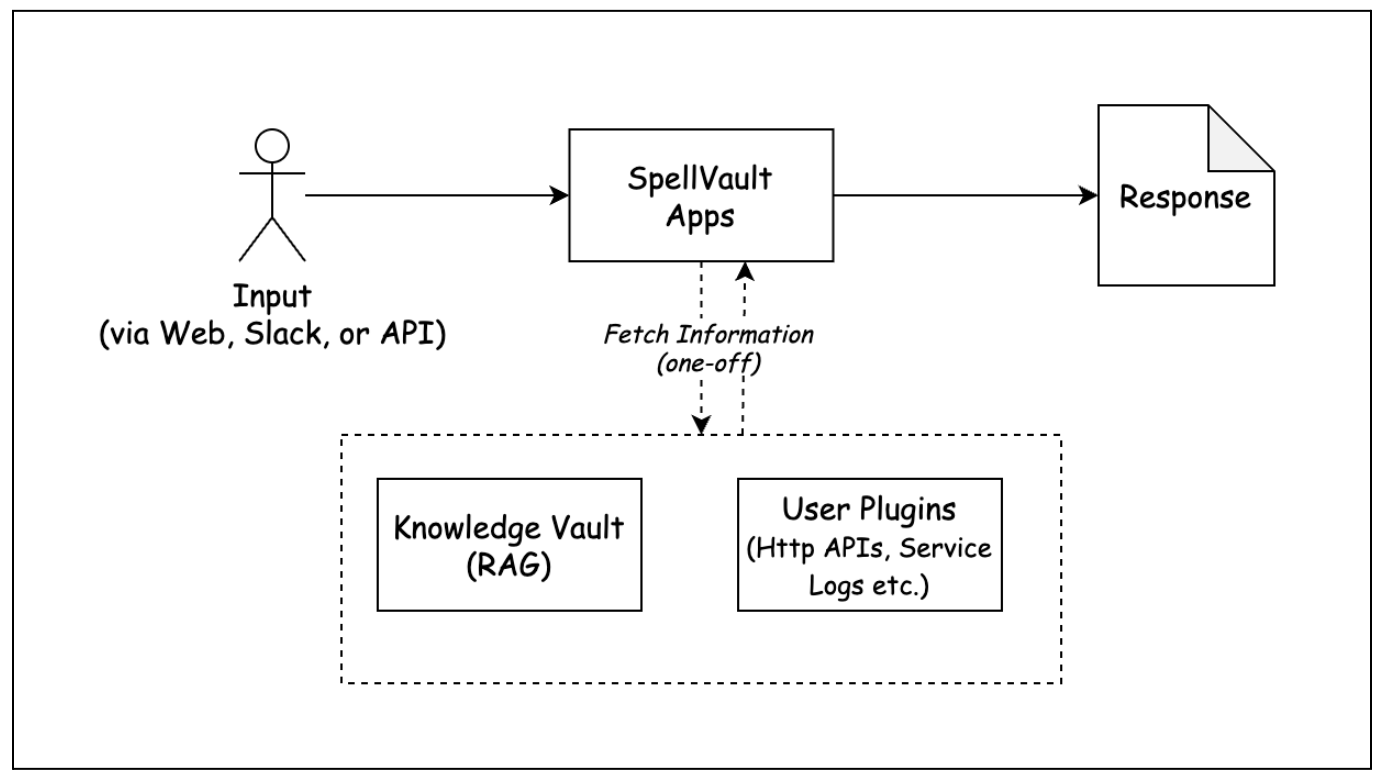
Plugins to fetch information on demand
To move beyond static knowledge retrieval, we needed a way for apps to act dynamically. This was made possible through SpellVault plugins—modular components that allow apps to interact with internal systems (e.g. service dashboards, incident trackers) and external APIs (e.g. search engines, weather data). Rather than being confined to their initial prompt and data, these plugins can fetch fresh information at runtime. From the available plugin types, users can create their own instances of plugins with custom settings, enabling highly specialized functionality tailored to their specific workflows. For instance, with SpellVault’s HTTP plugin, users can define custom endpoints and credentials, enabling their AI apps to make tailored HTTP calls during runtime. These custom plugins have become the backbone of many of our most impactful apps, empowering teams to seamlessly integrate SpellVault with their existing systems and processes.
Figure 1. SpellVault’s early architecture.
Making SpellVault accessible via common interfaces: Web, Slack, API
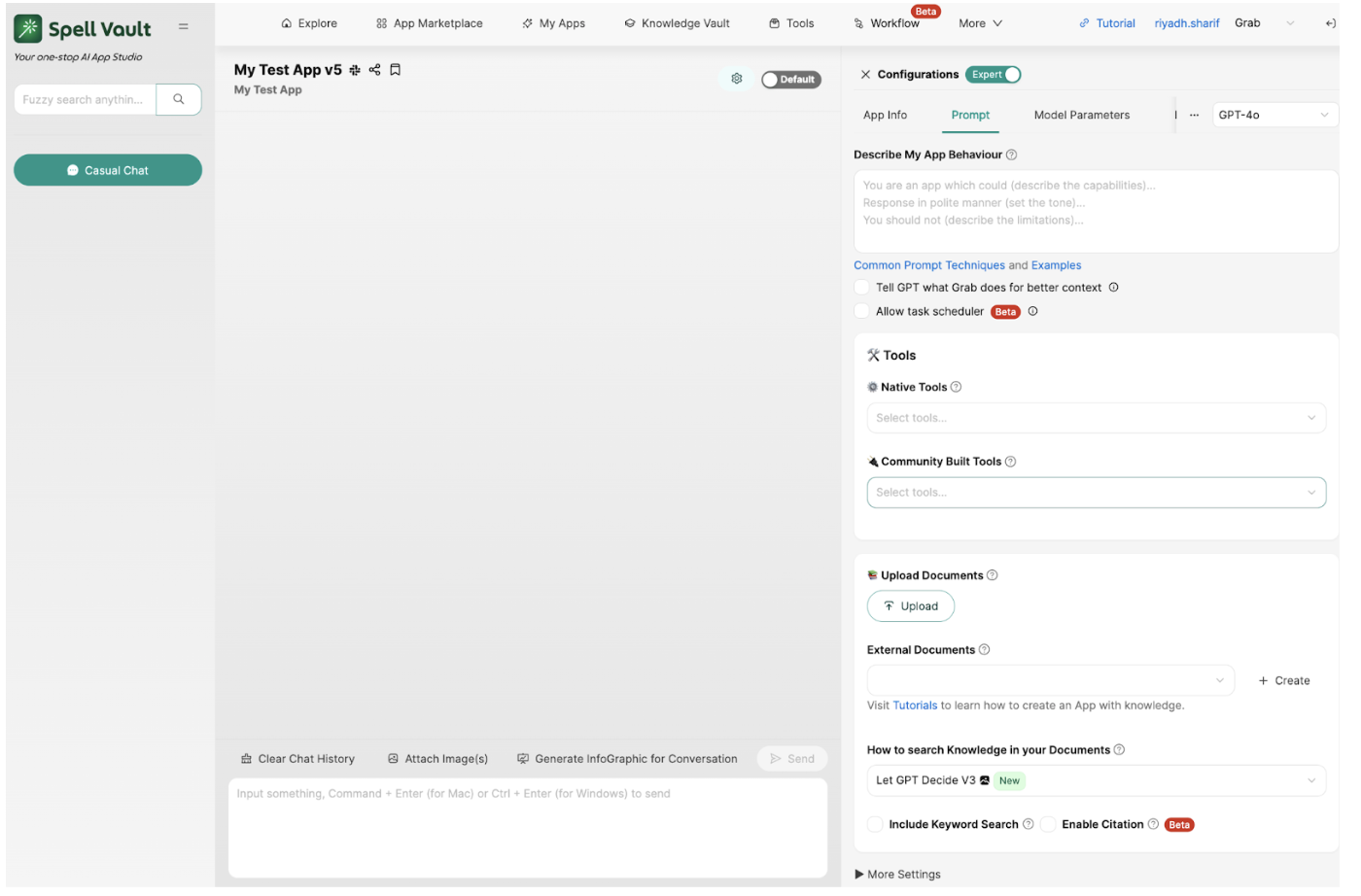
One of our primary goals was to make AI seamlessly accessible and useful within the tools users already use—whether it’s a browser or Slack. With SpellVault, users can make their AI apps in minutes and start using them via browser or Slack messaging immediately and intuitively, without requiring any additional setup. We also exposed APIs that enabled other internal services to integrate with SpellVault apps for a variety of use cases. This multi-channel approach ensured that SpellVault wasn’t just a standalone sandbox but a platform woven into existing tools and processes.
Users quickly adopted the platform, creating thousands of apps for internal productivity gains, automation, and even production use cases. The platform’s success validated our hypothesis that there was significant demand for democratized AI tools within the organization.
Figure 2. SpellVault’s web interface for LLM App configuration and chat.
Evolution over time
The AI landscape over the past few years has been defined by relentless change. New frameworks, execution paradigms, and standards have emerged in quick succession, each promising to make AI systems more powerful, more reliable, or more extensible. At Grab, we recognized that for SpellVault to stay relevant, it could not remain static. It needed to evolve in tandem with the ever-changing ecosystem, continuously incorporating valuable advancements while ensuring a seamless experience for our users.
This philosophy of continuous adaptation has guided SpellVault’s journey. From its early days as a simple RAG-powered app builder with a few plugins, the platform grew to support an extensive number of plugin types, richer execution models, and eventually a unified approach to tools. Each step was a response both to the needs of our users and to the shifting definition of what “building with AI” meant in practice. Rather than opting for a complete overhaul, SpellVault has embraced incremental advancements, ensuring that users can seamlessly benefit from new capabilities without disruption.
This approach to evolution has naturally positioned SpellVault to transition from a platform for LLM apps to one designed for AI agents. The following section delves into this transition in greater detail.
Expanding capabilities
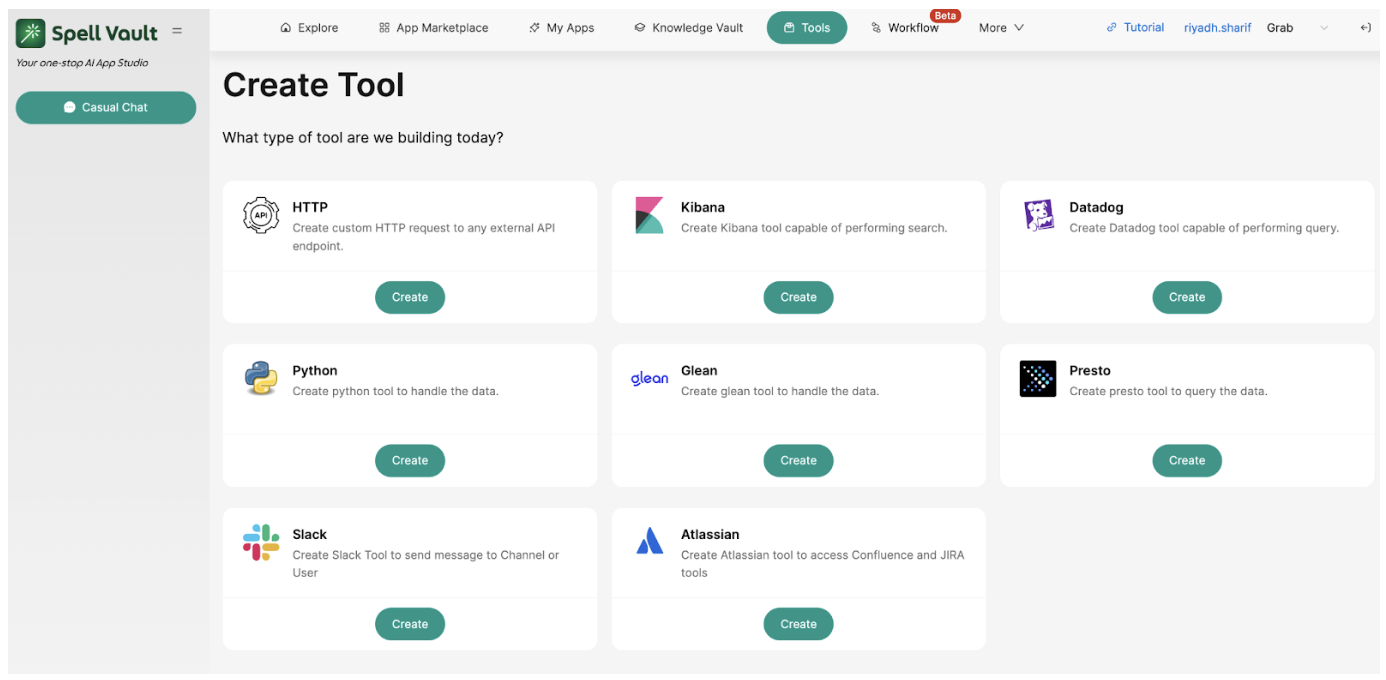
Over time, we introduced numerous new capabilities to SpellVault, driven both by user feedback and our commitment to innovation and staying ahead of industry trends. For instance, we extended support for different plugin types, enabling integrations with tools like Slack and Kibana, and continuously added more integrations to enhance the platform’s versatility. We implemented auto-updates for users’ Knowledge Vaults, ensuring their data remained current. With more users building with the platform, ensuring the trustworthiness of responses generated by SpellVault apps became increasingly important. We included citation capability to mitigate some of that concern. Recognizing the need for more precise answers to mathematical problems, we developed a feature that enabled LLMs to solve such problems using Python runtime. Additionally, many users requested an automated way to trigger their LLM apps, which led to the creation of a Task Scheduler feature that allows LLMs to schedule actions based on natural language user input.
A significant milestone in SpellVault’s evolution was the introduction of “Workflow,” a drag-and-drop interface within the platform that empowered users to design deterministic workflows. These workflows enabled users to seamlessly combine various components from the SpellVault ecosystem—such as LLM calls, Python code execution, and Knowledge Vault lookups—in a predefined and structured manner. This enabled advanced use cases for many users.
Figure 3. Evolving tools landscape of SpellVault with increasing integrations.
Shifting the execution model
As SpellVault evolved, a fundamental shift took place in the way its apps were executed internally. We transitioned from our legacy executor system, which facilitated one-off information retrieval from the Knowledge Vault or user plugins, to a more advanced graph based executor. This empowered SpellVault’s app execution with nodes, edges, and states that supported branching, looping, and modularity. This laid the groundwork for more sophisticated agent behaviors, moving beyond the linear input-output paradigm.
This transformed all existing SpellVault apps into ‘Reasoning and Acting’ agents, better known as ReAct agents – a “one size fits many” solution that significantly enhanced the capabilities of these apps. By enabling them to leverage the Knowledge Vault and plugins in a more agentic and dynamic manner, the ReAct agent framework allowed apps to perform more complex tasks while seamlessly preserving their existing functionality, ensuring no disruption to their behavior.
In addition, the internal decoupling of the executor and prompt engineering components enabled us to design multiple execution pathways with ease. This allowed us to provide generic Deep Research capability to any SpellVault app via a simple UI checkbox, as well as sophisticated internal workflows that cater to high-ROI complex use cases like on-call alert analysis. The Deep Research capability came with SpellVault’s ability to search across internal information repositories (e.g., Slack messages, Wiki, Jira) within Grab, as well as searching online for relevant information.
Figure 4. SpellVault’s evolved architecture with more dynamic context gathering and advanced interaction modes.
Towards an agentic framework
Over time, several capabilities were added to SpellVault, including features like Python code execution and internal repository search. Initially, these functionalities were integrated directly into the core PromptBuilder class. For users, these features were primarily accessible through simple checkboxes in the user interface. As SpellVault gradually transitioned towards giving more agency to user-crafted apps, we recognized that these capabilities should instead be positioned as “Tools” for LLMs to use with greater autonomy, similar to how ReAct agent–backed apps have been using SpellVault’s user plugins. We also understood that this shift could bring a clearer mental model for users where they were no longer simply toggling features but creating AI agents with access to a defined set of tools. The agents could then decide when and how to use those tools intelligently to accomplish tasks, making the overall experience more natural and intuitive.
This recognition led to the consolidation of these scattered capabilities into a unified framework called “Native Tools.” These Native Tools, along with SpellVault’s existing user plugins—rebranded as “Community Built Tools”—formed a comprehensive collection of tools that LLMs could dynamically invoke at runtime. Despite being grouped under the same umbrella, a key distinction was maintained: Native Tools required no user-specific configuration (e.g., performing internet searches), whereas Community Built Tools were custom, user-configured entities (e.g., invoking specific HTTP endpoints) created from available plugin types, often requiring credentials or other personalized settings.
This consolidation of capabilities under a unified Tools abstraction and enabling SpellVault apps to invoke them with greater autonomy marked a pivotal milestone in the platform’s evolution. It meaningfully shifted SpellVault toward making agentic behavior more natural, discoverable, and extensible for every app.
Figure 5. SpellVault’s Unified Tools housing both Native Tools and Community Built Tools.
SpellVault as an MCP service
As we streamlined SpellVault’s internal capabilities into a unified tools framework, we also turned our focus outward to align with industry standards. The growing adoption of the Model Context Protocol (MCP) presented an opportunity for agents and clients to seamlessly interact without requiring custom integrations. To remain at the forefront of innovation, we adapted SpellVault to function as an MCP service, enabling it to actively participate in this evolving ecosystem. This extension brought two key advancements:
SpellVault apps as MCP tools: Each app created in SpellVault can now be exposed through the MCP protocol. This allows other agents or MCP-compatible clients, such as IDEs or external orchestration frameworks, to treat a SpellVault app as a callable tool. Instead of living only inside our web user interface or Slack interface, these apps become accessible building blocks that other systems can invoke dynamically.
RAG as an MCP tool: We extended the same idea to our Knowledge Vaults. Through MCP, external clients can search, retrieve, and even add information to Vaults. This effectively turns SpellVault’s RAG pipeline into an MCP-native service, making contextual grounding available to agents beyond SpellVault itself.
While building the SpellVault MCP Server, we also created TinyMCP – a lightweight open-source Python library that adds MCP capabilities to an existing FastAPI app as just another router, instead of mounting a separate app.
By exposing both apps and RAG through MCP, we shifted SpellVault from being a self-contained platform to becoming an interoperable service provider in the agentic ecosystem. Users still benefit from the no-code simplicity inside SpellVault. However, the output of their work, apps, and knowledge, are now usable by other agents and tools outside of it.
Conclusion
SpellVault’s evolution shows how a platform can adapt with the AI landscape while staying true to its original mission of making powerful technology accessible to everyone. What began as a no-code builder for LLM apps has steadily expanded into an agentic platform – one where apps can act with more intelligence, agency, and context and interact with the systems around them.
This progress wasn’t the result of a single breakthrough, but of steady, incremental improvements that introduced new capabilities while preserving ease of use. By layering in these advancements thoughtfully but boldly, SpellVault has managed to support more sophisticated agentic behaviors without compromising its original goal of democratizing AI at Grab.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
How do you find the root cause of a configuration management failure when you have a peak of hundreds of changes in 15 minutes on thousands of servers?
That was the challenge we faced as we built the infrastructure to reduce release delays due to failures of Salt, a configuration management tool. (We eventually reduced such failures on the edge by over 5%, as we’ll explain below.) We’ll explore the fundamentals of Salt, and how it is used at Cloudflare. We then describe the common failure modes and how they delay our ability to release valuable changes to serve our customers.
By first solving an architectural problem, we provided the foundation for self-service mechanisms to find the root cause of Salt failures on servers, datacenters and groups of datacenters. This system is able to correlate failures with git commits, external service failures and ad hoc releases. The result of this has been a reduction in the duration of software release delays, and an overall reduction in toilsome, repetitive triage for SRE.
To start, we will go into the basics of the Cloudflare network and how Salt operates within it. And then we’ll get to how we solved the challenge akin to finding a grain of sand in a heap of Salt.
How Salt works
Configuration management (CM) ensures that a system corresponds to its configuration information, and maintains the integrity and traceability of that information over time. A good configuration management system ensures that a system does not “drift” – i.e. deviate from the desired state. Modern CM systems include detailed descriptions of infrastructure, version control for these descriptions, and other mechanisms to enforce the desired state across different environments. Without CM, administrators must manually configure systems, a process that is error-prone and difficult to reproduce.
Salt is an example of such a CM tool. Designed for high-speed remote execution and configuration management, it uses a simple, scalable model to manage large fleets. As a mature CM tool, it provides consistency, reproducibility, change control, auditability and collaboration across team and organisational boundaries.
Salt’s design revolves around a master/minion architecture, a message bus built on ZeroMQ, and a declarative state system. (At Cloudflare we generally avoid the terms “master” and “minion.” But we will use them here because that’s how Salt describes its architecture.) The salt master is a central controller that distributes jobs and configuration data. It listens for requests on the message bus and dispatches commands to targeted minions. It also stores state files, pillar data and cache files. The salt minion is a lightweight agent installed on each managed host/server. Each minion maintains a connection to the master via ZeroMQ and subscribes to published jobs. When a job matches the minion, it executes the requested function and returns results.
The diagram below shows a simplification of the Salt architecture described in the docs, for the purpose of this blog post.
The state system provides declarative configuration management. States are often written in YAML and describe a resource (package, file, service, user, etc.) and the desired attributes. A common example is a package state, which ensures that a package is installed at a specified version.
States can call execution modules, which are Python functions that implement system actions. When applying states, Salt returns a structured result containing whether the state succeeded (result: True/False), a comment, changes made, and duration.
Salt at Cloudflare
We use Salt to manage our ever-growing fleet of machines, and have previously written about our extensive usage. The master-minion architecture described above allows us to push configuration in the form of states to thousands of servers, which is essential for maintaining our network. We’ve designed our change propagation to involve blast radius protection. With these protections in place, a highstate failure becomes a signal, rather than a customer-impacting event.
This release design was intentional – we decided to “fail safe” instead of failing hard. By further adding guardrails to safely release new code before a feature reaches all users, we are able to propagate a change with confidence that failures will halt the Salt deployment pipeline by default. However, every halt blocks other configuration deployments and requires human intervention to determine the root cause. This can quickly become a toilsome process as the steps are repetitive and bring no enduring value.
Part of our deployment pipeline for Salt changes uses Apt. Every X minutes a commit is merged into the master branch, per Y minutes those merges are bundled and deployed to APT servers. The key file to retrieving Salt Master configuration from that APT server is the APT source file:
# /etc/apt/sources.list.d/saltcodebase.sources
# MANAGED BY SALT -- DO NOT MODIFY
Types: deb
URIs: mirror+file:/etc/apt/mirrorlists/saltcodebase.txt
Suites: stable canary
Components: cloudflare
Signed-By: /etc/apt/keyrings/cloudflare.gpg
This file directs a master to the correct suite for its specific environment. Using that suite, it retrieves the latest package containing the relevant Salt Debian package with the latest changes. It installs that package and begins deploying the included configuration. As it deploys the configuration on machines, the machines report their health using Prometheus. If a version is healthy, it will be progressed into the next environment. Before it can be progressed, a version has to pass a certain soak threshold to allow a version to develop its errors, making more complex issues become apparent. That is the happy case.
The unhappy case brings a myriad of complications: As we do progressive deployments, if a version is broken, any subsequent version is also broken. And because broken versions are continuously overtaken by newer versions, we need to stop deployments altogether. In a broken version scenario, it is crucial to get a fix out as soon as possible. This touches upon the core question of this blog post: What if a broken Salt version is propagated across the environment, we are abandoning deployments, and we need to get a fix out as soon as possible?
The pain: how Salt breaks and reports errors (and how it affects Cloudflare)
While Salt aims for idempotent and predictable configuration, failures can occur during the render, compile, or runtime stages. These failures are commonly due to misconfiguration. Errors in Jinja templates or invalid YAML can cause the render stage to fail. Examples include missing colons, incorrect indentation, or undefined variables. A syntax error is often raised with a stack trace pointing to the offending line.
Another frequent cause of failure is missing pillar or grain data. Since pillar data is compiled on the master, forgetting to update pillar top files or refreshing pillar can result in KeyError exceptions. As a system that maintains order using requisites, misconfigured requisites can lead to states executing out-of-order or being skipped. Failures can also happen when minions are unable to authenticate with the master, or cannot reach the master due to network or firewall issues.
Salt reports errors in several ways. By default, the salt and salt-call commands exit with a retcode 1 when any state fails. Salt also sets internal retcodes for specific cases: 1 for compile errors, 2 when a state returns False, and 5 for pillar compilation errors. Test mode shows what changes would be made without actually executing them, but is useful for catching syntax or ordering issues. Debug logs can be toggled using the -l debug CLI option (salt <minion> state.highstate -l debug).
The state return also includes the details of the individual state failures – the durations, timestamps, functions and results. If we introduce a failure to the file.managed state by referencing a file that doesn’t exist in the Salt fileserver, we see this failure:
web1:
----------
ID: nginx
Function: pkg.installed
Result: True
Comment: Package nginx is already installed
Started: 15:32:41.157235
Duration: 256.138 ms
Changes:
----------
ID: /etc/nginx/nginx.conf
Function: file.managed
Result: False
Comment: Source file salt://webserver/files/nginx.conf not found in saltenv 'base'
Started: 15:32:41.415128
Duration: 14.581 ms
Changes:
Summary for web1
------------
Succeeded: 1 (changed=0)
Failed: 1
------------
Total states run: 2
Total run time: 270.719 ms
The flexibility of the output format means that humans can parse them in custom scripts. But more importantly, it can also be consumed by more complex, interconnected automation systems. We knew we could easily parse these outputs to attribute the cause of a Salt failure with an input – e.g. a change in source control, an external service failure, or a software release. But something was missing.
The solutions
Configuration errors are a common cause of failure in large-scale systems. Some of these could even lead to full system outages, which we prevent with our release architecture. When a new release or configuration breaks in production, our SRE team needs to find and fix the root cause to avoid release delays. As we’ve previously noted, this triage is tedious and increasingly difficult due to system complexity.
While some organisations use formal techniques such as automated root cause analysis, most triage is still frustratingly manual. After evaluating the scope of the problem, we decided to adopt an automated approach. This section describes the step-by-step approach to solving this broad, complex problem in production.
Phase one: retrievable CM inputs
When a Salt highstate fails on a minion, SRE teams faced a tedious investigation process: manually SSHing into minions, searching through logs for error messages, tracking down job IDs (JIDs), and locating the job associated with the JID on one of multiple associated masters. This is all while racing against a 4-hour retention window on master logs. The fundamental problem was architectural: Job results live on Salt Masters, not on the minions where they’re executed, forcing operators to guess which master processed their job (SSHing into each one) and limiting visibility for users without master access.
We built a solution that caches job results directly on minions, similar to the local_cache returner that exists for masters. That enables local job retrieval and extended retention periods. This transformed a multistep, time-sensitive investigation into a single query — operators can retrieve job details, automatically extract error context, and trace failures back to specific file changes and commit authors, all from the minion itself. The custom returner filters and manages cache size intelligently, eliminating the “which master?” problem while also enabling automated error attribution, reducing time to resolution, and removing human toil from routine troubleshooting.
By decentralizing job history and making it queryable at the source, we moved significantly closer to a self-service debugging experience where failures are automatically contextualized and attributed, letting SRE teams focus on fixes rather than forensics.
Phase two: Self-service using a Salt Blame Module
Once job information was available on the minion, we no longer needed to resolve which master triggered the job that failed. The next step was to write a Salt execution module that would allow an external service to query for job information, and more specifically failed job information, without needing to know Salt internals. This led us to write a module called Salt Blame. Cloudflare prides itself on its blameless culture, our software on the other hand…
The blame module is responsible for pulling together three things:
Local job history information
CM inputs (latest commit present during the job)
Git repo commit history
We chose to write an execution module for simplicity, decoupling external automation from the need to understand Salt internals, and potential usage by operators for further troubleshooting. Writing execution modules is already well established within operational teams and adheres to well-defined best practices such as unit tests, linting and extensive peer-review.
The module is understandably very simple. It iterates in reverse chronological order through the jobs in the local cache and looks for the first job failure chronologically, and then the successful job immediately prior to it. This is for no other reason than narrowing down the true first failure and giving us before and after state results. At this stage, we have several avenues to present context to the caller: To find possible commit culprits, we look through all commits between the last successful Job ID and the failure to determine if any of these changed files relevant to the failure. We also provided the list of failed states and their outputs as another avenue to spot the root cause. We’ve learned that this flexibility is important to cover the wide range of failure possibilities.
We also make a distinction between normal failed states, and compile errors. As described in the Salt docs, each job returns different retcodes based on the outcome.
Compile Error: 1 is set when any error is encountered in the state compiler.
Failed State: 2 is set when any state returns a False result.
Most of our failures manifest as failed states as a result of a change in source control. An engineer building a new feature for our customers may unintentionally introduce a failure that was uncaught by our CI and Salt Master tests. In the first iteration of the module, listing all the failed states was sufficient to pinpoint the root cause of a highstate failure.
However, we noticed that we had a blind spot. Compile errors do not result in a failed state, since no state runs. Since these errors returned a different retcode from what we checked for, the module was completely blind to them. Most compile errors happen when a Salt service dependency fails during the state compile phase. They can also happen as a result of a change in source control, although that is rare.
With both state failures and compile errors accounted for, we drastically improved our ability to pinpoint issues. We released the module to SREs who immediately realised the benefits of faster Salt triage.
# List all the recent failed states
minion~$ salt-call -l info blame.last_failed_states
local:
|_
----------
__id__:
/etc/nginx/nginx.conf
__run_num__:
5221
__sls__:
foo
changes:
----------
comment:
Source file salt://webserver/files/nginx.conf not found in saltenv 'base'
duration:
367.233
finish_time_stamp:
2025-10-22T10:00:17.289897+00:00
fun:
file.managed
name:
/etc/nginx/nginx.conf
result:
False
start_time:
10:00:16.922664
start_time_stamp:
2025-10-22T10:00:16.922664+00:00
# List all the commits that correlate with a failed state
minion~$ salt-call -l info blame.last_highstate_failure
local:
----------
commits:
|_
----------
author_email:
[email protected]
author_name:
John Doe
commit_datetime:
2025-06-30T15:29:26.000+00:00
commit_id:
e4a91b2c9f7d3b6f84d12a9f0e62a58c3c7d9b5a
path:
/srv/salt/webserver/init.sls
message:
reviewed 5 change(s) over 12 commit(s) looking for 1 state failure(s)
result:
True
# List all the compile errors
minion~$ salt-call -l info blame.last_compile_errors
local:
|_
----------
error_types:
job_timestamp:
2025-10-24T21:55:54.595412+00:00
message: A service failure has occured
state: foo
traceback:
Full stack trace of the failure
urls: http://url-matching-external-service-if-found
Phase three: automate, automate, automate!
Faster triage is always a welcome development, and engineers were comfortable running local commands on minions to triage Salt failures. But in a busy shift, time is of the essence. When failures spanned across multiple datacenters or machines, it easily became cumbersome to run commands across all these minions. This solution also required context-switches between multiple nodes and datacenters. We needed a way to aggregate common failure types using a single command – single minions, pre-production datacenters and production datacenters.
We implemented several mechanisms to simplify triage and eliminate manual triggers. We aimed to get this tooling as close to the triage location as possible, which is often chat. With three distinct commands, engineers were now able to triage Salt failures right from chat threads.
With a hierarchical approach, we made individual triage possible for minions, data centers and groups of data centers. A hierarchy makes this architecture fully extensible, flexible and self-organising. An engineer is able to triage a failure on one minion, and at the same time the entire data center as needed.
The ability to triage multiple data centers at the same time became immediately useful for tracking the root cause of failures in pre-production data centers. These failures delay the propagation of changes to other data centers, and hinder our ability to release changes for customer features, bug fixes or incident remediation. The addition of this triage option has cut down the time to debug and remediate Salt failures by over 5%, allowing us to consistently release important changes for our customers.
While 5% does not immediately look like a drastic improvement, the magic is in the cumulative effect. We won’t release actual figures of the amount of time releases are delayed for, but we can do a simple thought experiment. If the average amount of time spent is even just 60 minutes per day, a reduction by 5% saves us 90 minutes (one hour 30 minutes) per month.
Another indirect benefit lies in more efficient feedback loops. Since engineers spend less time fiddling with complex configurations, that energy is diverted towards preventing reoccurrence, further reducing the overall time by an immeasurable amount. Our future plans include measurement and data analytics to understand the outcomes of these direct and indirect feedback loops.
The image below shows an example of pre-production triage output. We are able to correlate failures with git commits, releases, and external service failures. During a busy shift, this information is invaluable for quickly fixing breakage. On average, each minion “blame” takes less than 30 seconds, while multiple data centers are able to return a result in a minute or less.
The image below describes the hierarchical model. Each step in the hierarchy is executed in parallel, allowing us to achieve blazing fast results.
With these mechanisms available, we further cut down triage time by triggering the triage automation on known conditions, especially those with impact to the release pipeline. This directly improved the velocity of changes to the edge since it took less time to find a root cause and fix-forward or revert.
Phase four: measure, measure, measure
After we got blazing fast Salt triage, we needed a way to measure the root causes. While individual root causes are not immediately valuable, historical analysis was deemed important. We wanted to understand the common causes of failure, especially as they hinder our ability to deliver value to customers. This knowledge creates a feedback loop that can be used to keep the number of failures low.
Using Prometheus and Grafana, we track the top causes of failure: git commits, releases, external service failures and unattributed failed states. The list of failed states is particularly useful because we want to know repeat offenders and drive better adoption of stable releasing practices. We are also particularly interested in root causes — a spike in the number of failures due to git commits indicates a need to adopt better coding practices and linting, a spike in external service failures indicates a regression in an internal system to be investigated, and a spike in release-based failures indicates a need for better gating and release-shepherding.
We analyse these metrics on a monthly cycle, providing feedback mechanisms through internal tickets and escalations. While the immediate impact of these efforts is not yet visible as the efforts are nascent, we expect to improve the overall health of our Saltstack infrastructure and release process by reducing the amount of breakage we see.
The broader picture
Much of operational work is often seen as a “necessary evil”. Humans in ops are conditioned to intervene when failures happen and remediate them. This cycle of alert-response is necessary to keep the infrastructure running, but it often leads to toil. We have discussed the effect of toil in a previous blog post.
This work represents another step in the right direction – removing more toil for our on-call SREs, and freeing up valuable time to work on novel issues. We hope that this encourages other operations engineers to share the progress they are making towards reducing overall toil in their organizations. We also hope that this sort of work can be adopted within Saltstack itself, although the lack of homogeneity in production systems across several companies makes it unlikely.
In the future, we plan to improve the accuracy of detection and rely less on external correlation of inputs to determine the root cause of failed outcomes. We will investigate how to move more of this logic into our native Saltstack modules, further streamlining the process and avoiding regressions as external systems drift.
If this sort of work is exciting to you, we encourage you to take a look at our careers page.
In our mission to optimize continuous integration and delivery (CI/CD), we have taken a bold step by relocating our infrastructure from a cloud vendor in the US to a colocation cluster within Southeast Asia, closer to our Git server infrastructure. This change has dramatically improved the performance of our macOS builds, primarily by reducing the network traffic delays associated with distant data centers. By bringing our infrastructure closer to home, we have not only accelerated CI/CD job completion times but also massively slashed operational costs.
Join us as we delve into the Mac Cloud Exit journey and the significant improvements it has brought to our workflows.
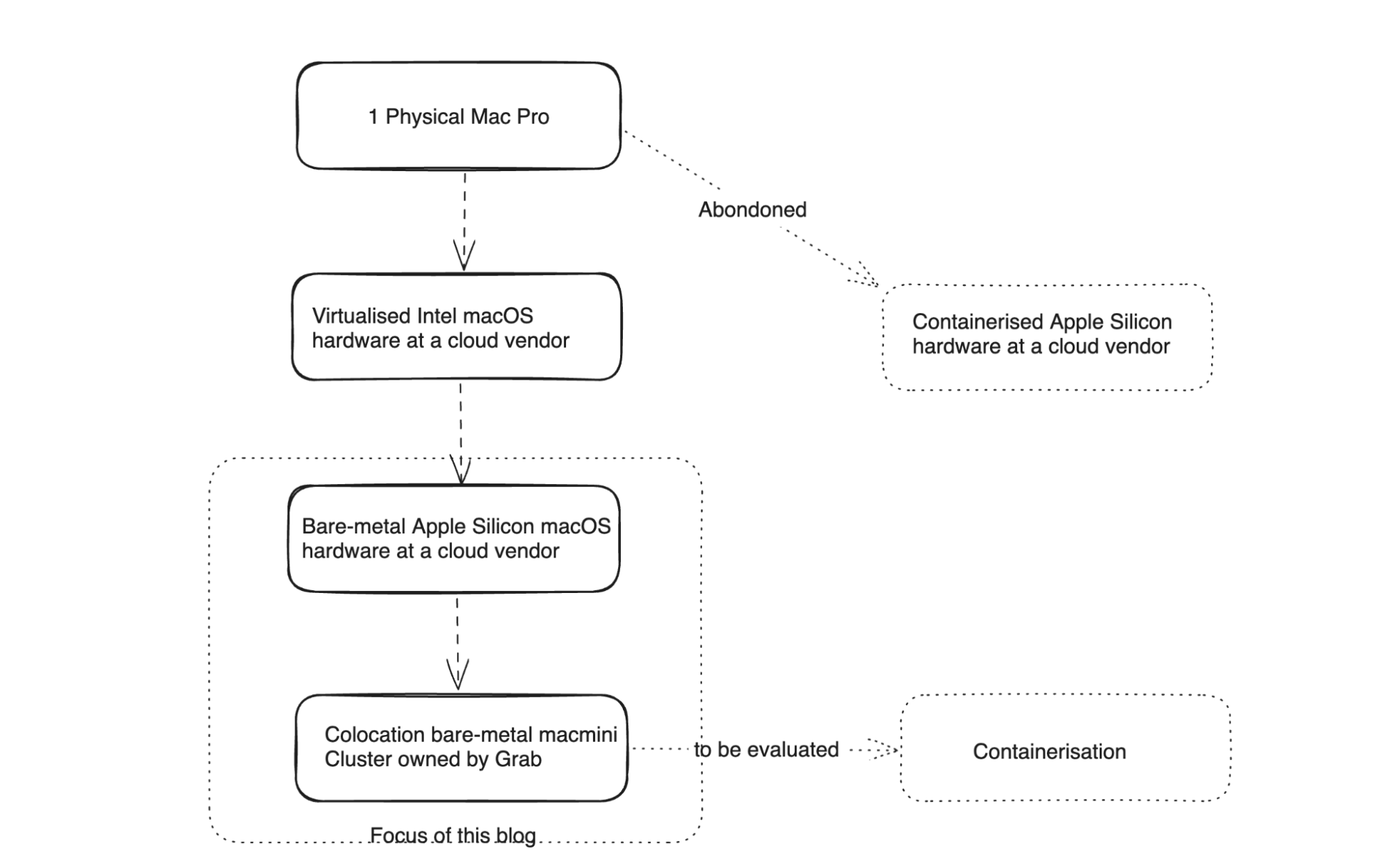
Our macOS CI/CD infrastructure has evolved from 1 Physical Mac Pro running in our office to a cluster of 250 Mac minis fully occupied during peak hours of the day. There were multiple stages in the journey to transition to the current state. The following diagram shows the focus area for this blog post.
Figure 1: Infrastructure transition path
Before and after: Visualizing the evolution
We began our journey with a much simpler setup.
Figure 2: Photo of the setup when we started
Today, that infrastructure has scaled significantly to meet the growing demands of Grab
Figure 3: Mac mini cluster today
Economy at scale: The rent vs. own equation
At the beginning, it was a no-brainer to rent when our demand for macOS hardware increased from 1 MacPro to 20 times that size. However, when that grew to over 200 machines, the total cost became significant, prompting us to consider:
What is the desired reliability for this cluster?
What would be the total cost of ownership for us to build this cluster ourselves compared to cloud-based options?
What kind of operational leverage would it bring us by controlling end-to-end stack by ourselves?
What is Grab’s scale
At Grab, our iOS build needs have scaled quite significantly, so we went from running some builds on a single Mac Pro to running them on an army of 250+ Mac minis. And so did the cost.
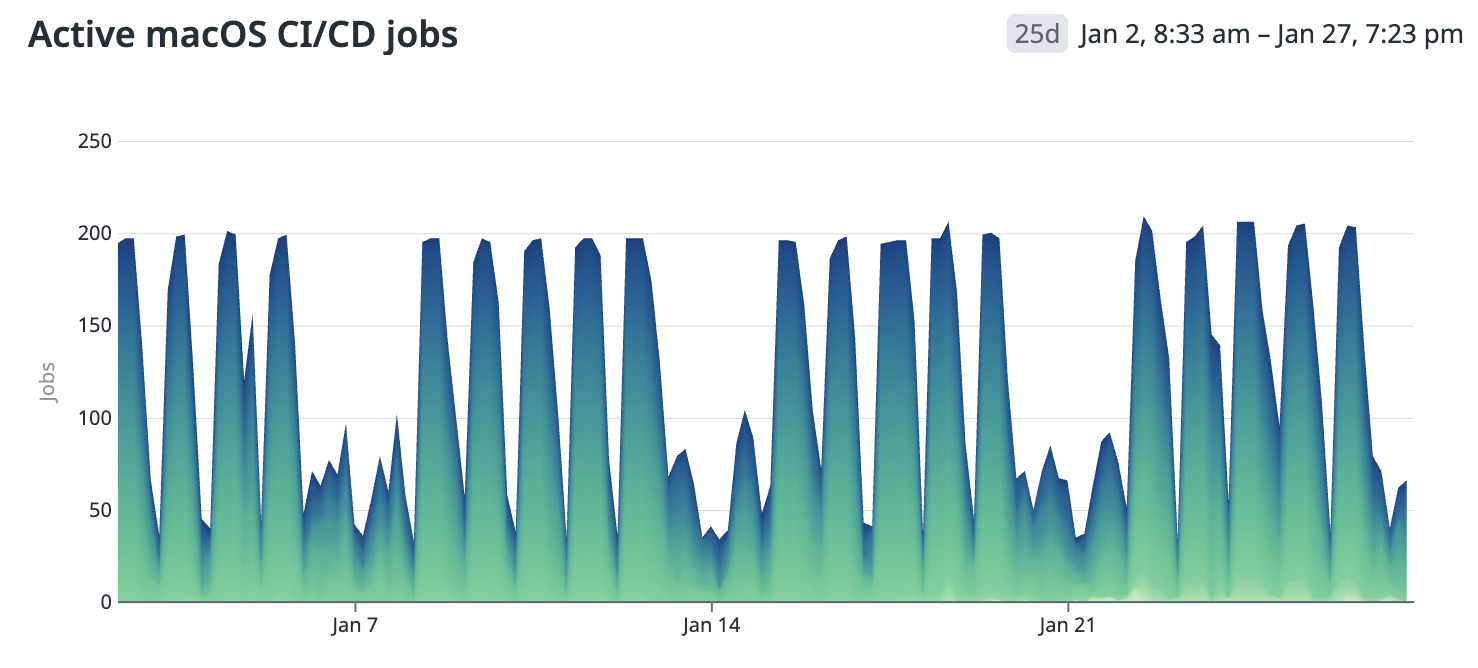
Active jobs trend
The total number of jobs trend is one of the data points to understand the demand situation. The following chart is a snapshot from our demand curve in 2022. Peak demand often started to exceed the available supply, creating queues for the jobs.
We estimated we would need 200+ machines to comfortably supply for the peak demand and projected a demand for 400+ machines in 2025.
Figure 4: Active macOS CI/CD jobs
What is our workload
We have several iOS apps that share a common macOS compute cluster for their CI/CD workloads.
This includes, but is not limited to:
We did a comprehensive comparison and total cost of ownership (TCO) estimation to compare many different options, including cloud vendors and colocation in different places.
Cost of macOS compute
The expense of macOS compute is notably higher, particularly in continuous integration (CI) setups, posing challenges for optimal configuration. Several factors contribute to these increased costs:
Apple’s restrictive EULA mandates a minimum lease period of 24 hours for macOS instances, which alters the utilization equation.
Economies of scale are not favorable for available macOS hardware configurations compared to alternatives. Optimized server hardware designed for racking offers various configurations that reduce operational costs, unlike macOS options such as Mac Mini and Mac Pro.
Initially, we conducted rough estimations to assess the total cost of ownership differences between cloud, colocation, and on-premises setups. Even with conservative estimates for manpower and engineering costs, colocation or on-premises setups proved more cost-effective at our scale. This cost disparity became even more pronounced when focusing on cloud vendors providing macOS compute physically located in Southeast Asia.
We opted to conduct an in-depth evaluation of the following options:
Establishing a macOS cluster at our headquarters in Singapore, which was swiftly dismissed due to scalability and cost concerns making it an unsuitable long-term solution.
Colocating in a Southeast Asian country where we have operational presence.
Choice of location
As a Southeast Asian company, we maintain offices in each country where we operate, some of which boast advanced data center infrastructures. We focused our location choices on Singapore and Malaysia, assessing them based on several criteria, including:
The maturity of existing data center infrastructure.
The proximity of the data centers to our offices, ensuring staff availability for infrastructure setup.
The cost and reliability of power.
The proximity to our Git servers and the expense of establishing direct network connections.
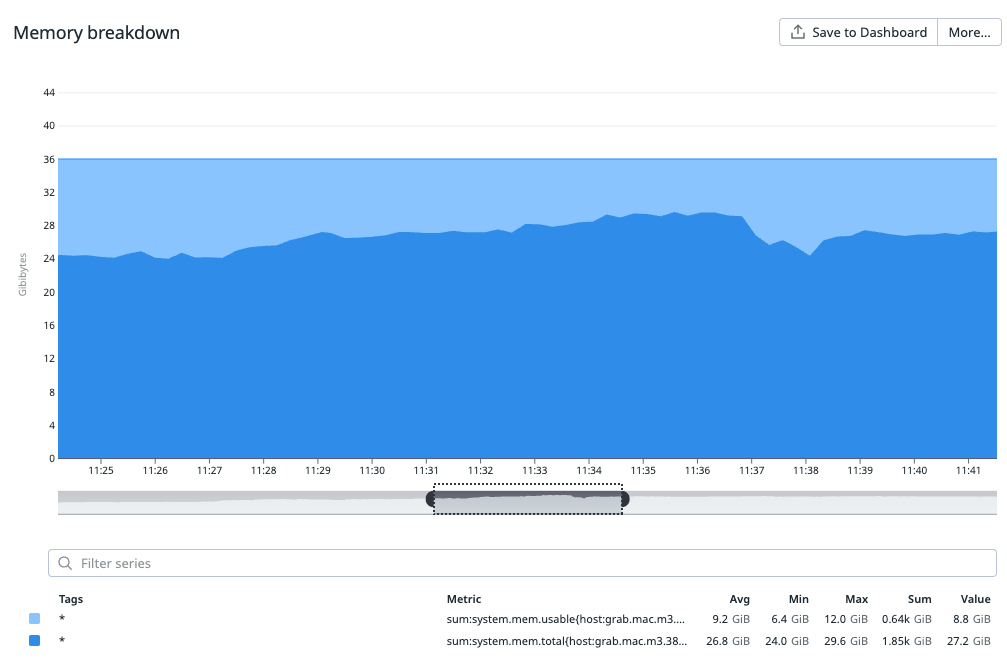
Our choice of hardware model for our build and test workload was guided by a cost-benefit analysis. We decided to use bare-metal setups without virtualization, simplifying migration processes, which may be revisited in the future. We ensured we neither over-specified nor under-specified the bare-metal hardware. We had a clear understanding of the resource consumption of our most demanding workload on a few reference models, as illustrated in the following graphs.
Figure 5: User and System CPU usage during build operation of our largest iOS mobile codebase
Figure 6: Memory Usage during build operation of our largest iOS mobile codebase
Virtualization vs bare-metal
Virtualization offers significant advantages in managing and provisioning clusters, including the flexibility to create ephemeral builds. However, our experience with macOS virtualization has been mixed. While off-the-shelf virtualization solutions provide maintenance benefits, they often come at the cost of performance or stability.
Key points:
Improved Utilization: Virtualization can improve resource utilization by consolidating multiple workloads on fewer physical servers, thereby reducing the overall cost.
Performance Penalty: However, the performance penalty associated with virtualization can sometimes negate these cost benefits. This is particularly true for macOS virtualization, where we have observed trade-offs in performance or stability.
Evolution of Virtualization: The virtualization space has been evolving and making good progress. We may re-evaluate these solutions in the future as they continue to mature and potentially address current performance and stability issues.
Our conclusion was to stick to bare-metal for the time-being as the benefits didn’t justify the downside and cost.
Execution
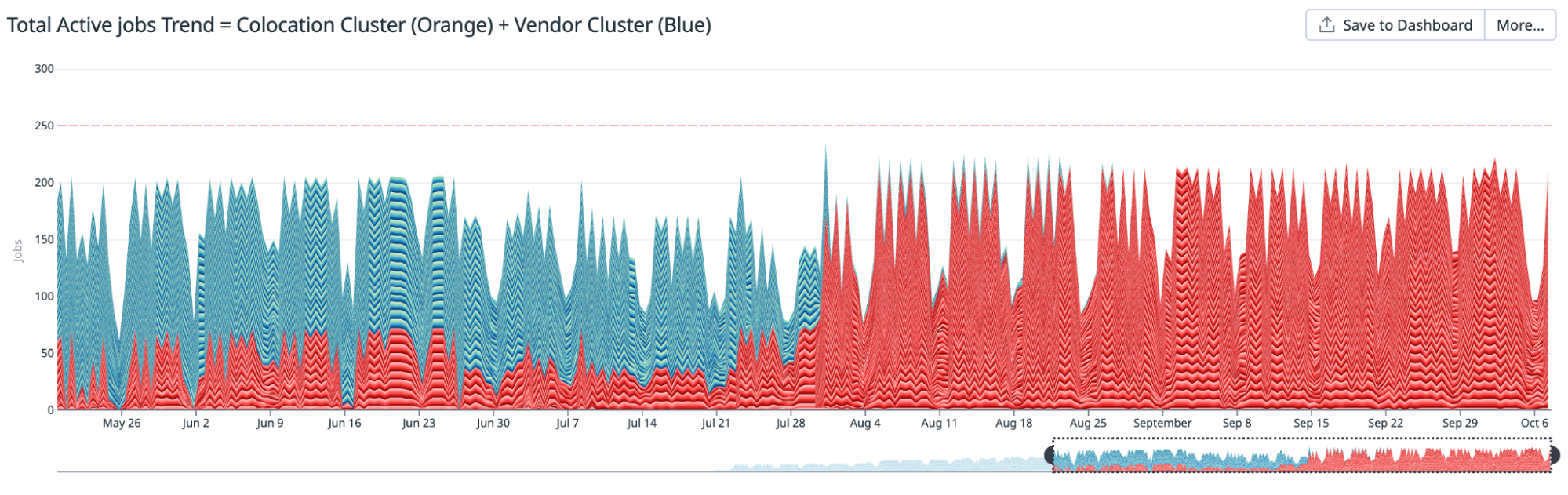
Progressive Migration
Any disruption to the macOS CI/CD cluster would be hugely disruptive to the company given our scale highlighted above. So, we enabled new cluster partially for part of the workload for a reasonably long period of time and monitored and compared:
Job failure rate
Jobs performance
Reliability
Once we were confident, we made the full switch and terminated vendor contracts at due.
Figure 7: Total active jobs trend
Result
The migration yielded better results overall than our initial conservative estimates.
Cost savings: Estimated over 2.4 million USD over three years
Performance improvement: Between 20-40% depending on the use case
Stability: No compromise
A strategic investment in our mission to drive Southeast Asia forward by onshoring critical Mac infrastructure into the region.
Cost
We anticipate a three-year replacement cycle for our hardware. While some equipment may be utilized beyond this period, it provides a reasonable lifespan for cost estimation purposes.
The lifecycle of networking equipment involves both physical reliability, following the bathtub curve, and technological obsolescence, often necessitating replacement every 3 to 5 years. Mac minis could become outdated after approximately three years, making the opportunity cost of extended use potentially higher than the net replacement cost after benefits.
Importantly, the experience gained during this cycle could significantly reduce the engineering costs associated with future replacements.
Overall, we project total cost of ownership savings of approximately 2.4 million USD over a three-year period compared to our last cloud-based setup rented from a vendor.
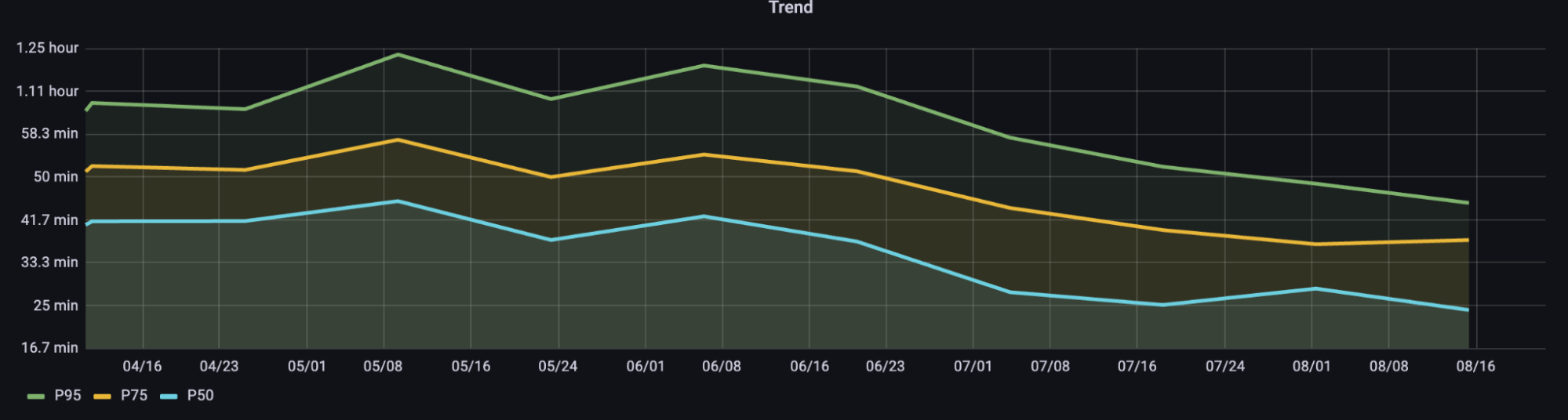
Performance
We measured the performance gains in two of ou largest iOS apps at Grab:
The following table summarizes the total time measured before and after the migration for total CI pipeline time and building the app codebase. Measurements are presented in 3 percentiles (p50, p75, p95)
App/Metric
Time (Minutes)
p50
p75
p95
CI Pipeline Time Trend for Grab: Taxi Ride, Food Delivery
Before
43
54
67
After
33
42
49
Gain
23.26%
22.22%
26.87%
App build time Trend for Grab: Taxi Ride, Food Delivery
Before
10.7
13.2
17.6
After
6.45
9
10.8
Gain
39.72%
31.82%
38.64%
Pipeline time trend for Grab Driver: App for Partners
Before
47
50
52
After
26
31
32
Gain
44.68%
38.00%
38.46%
App build time trend for Grab Driver: App for Partners
Before
10
13
14
After
6
8
8.5
Gain
40.00%
38.46%
39.29%
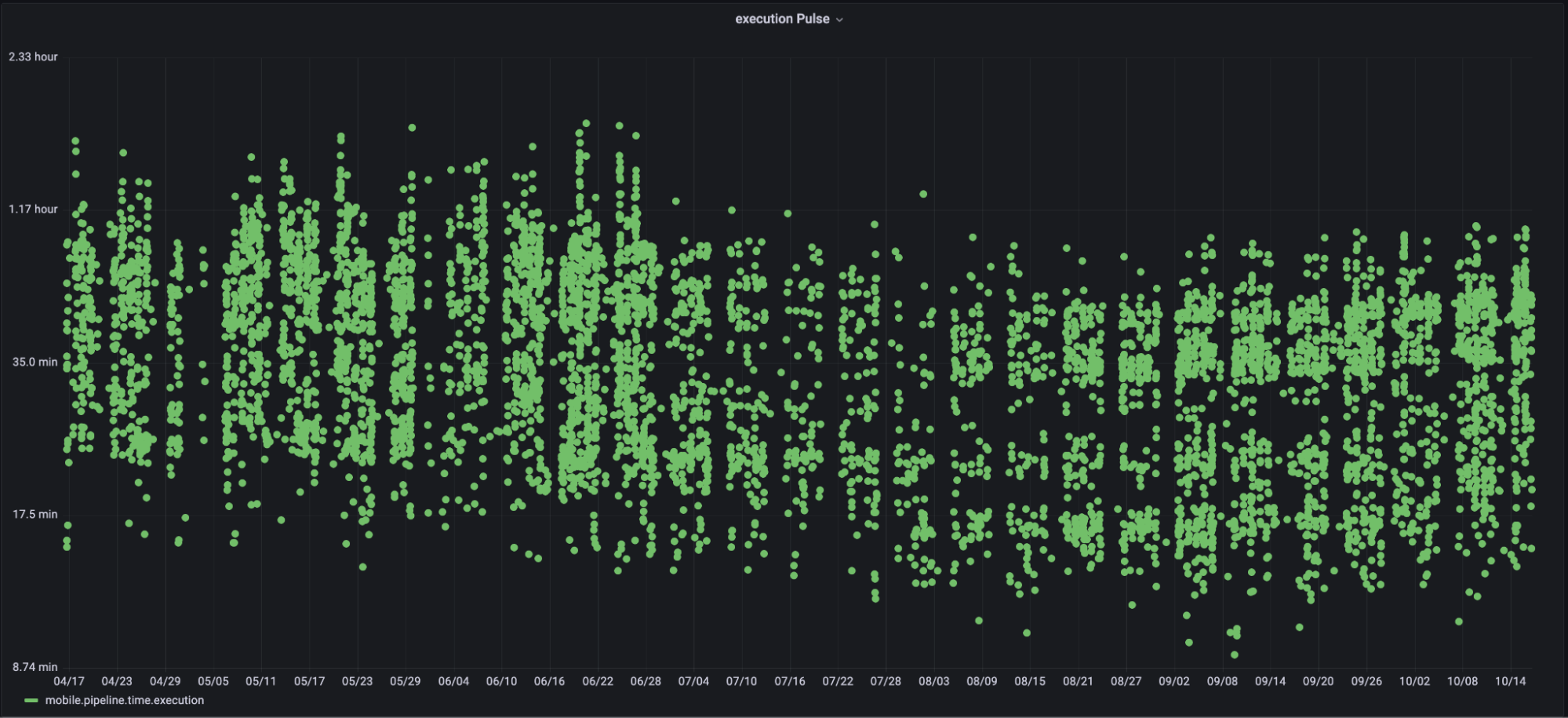
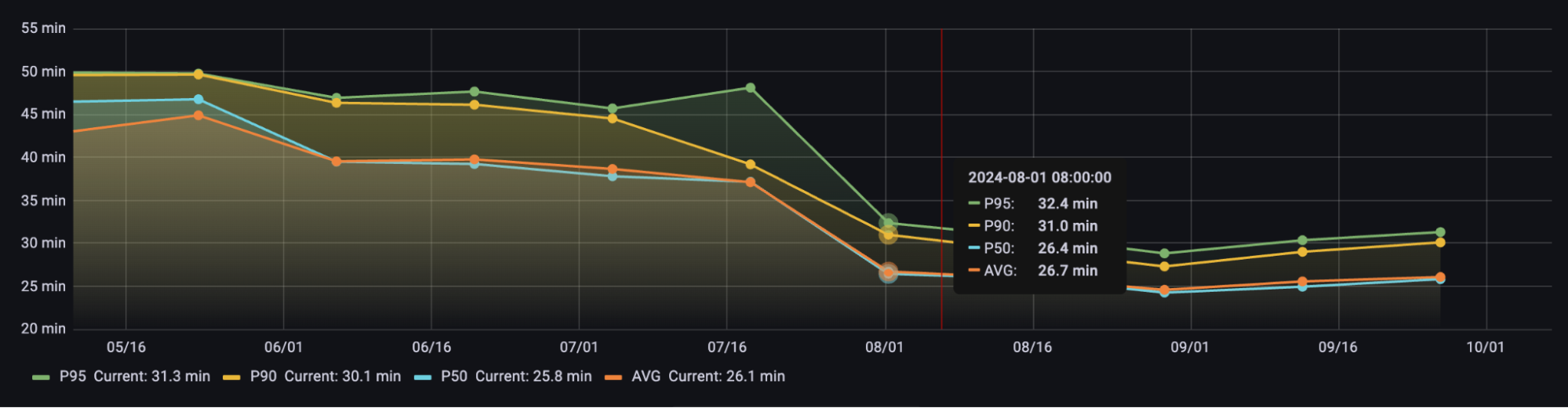
A different perspective: Trends
The following trend illustrations show how the performance of various tasks has improved while we progressively migrated to the new colocation setup.
Figure 8: 14 day aggregate percentiles of p50, p75 and p95 for total CI pipeline times for the Taxi Ride, Food Delivery codebase
Figure 9: Pipeline time pulse for the Taxi Ride, Food Delivery codebase
Figure 10: 14 day aggregate percentiles of p50, p75 and p95 for total CI pipeline times for the App for Partners codebase
Stability
We measured overall job failure rates between both clusters for extended periods as a guardrail metric and ensured the stability of the new cluster before shutting down the old one.
Colocation setup and rack configuration
The following table provides an overview of the layout of our new Mac mini cluster.
Component
Description
Redundancy
Rack
We have got four 42RU (600x1200x42RU) racks housing 200+ Mac minis, plus some spare racks to house upcoming scheduled capacity upgrades.
Racks have shared resources which have their own redundancy. Generally rack separation does provide some level of redundancy for total compute.
Power
2 power sources power the cluster. Each rack is powered by these 2 power sources. It is 1U, 2-post rack mount.
Losing 1 power source will reduce 50% of capacity.
Mac Mini
We rack 2 Mac minis in a row on a mounting tray, typically racking 70 minis in one rack in total. Except for the first rack which requires extra rack units (RUs) for core switches and firewalls.
KVM
KVM switches with adaptor for keyboard and mouse emulation when required.
N/A
Networking Setup
Networking consists of Core Switches, Access Switches, Firewalls, Internet and Direct Connect Links.
Mostly active/active redundancy.
Provisioning and configuration
Zero-touch provisioning
Zero-touch provisioning is a streamlined method for setting up and configuring devices with minimal manual intervention. This section outlines the process and benefits of zero-touch provisioning using Jamf for Mac minis.
We have a setup that enables these machines to start accepting jobs once they are racked up and connected (Power and network cables). Here is how it works:
MDM configuration and Automated Device Enrollment (ADE)
ADE, previously known as Device Enrollment Program (DEP), is an Apple service that facilitates automatic enrollment. When a new Mac Mini is acquired and registered in the organization’s ADE account, it is primed for automatic enrollment. Administrators create a PreStage enrollment configuration within Jamf Pro, encompassing account settings (e.g., creating a local admin account, hiding it in Users & Groups, skipping account creation for the user), configuration profiles (defining device settings, security policies, and restrictions), and enrollment packages (including necessary software and scripts).
Device setup: Activation and redirection
Upon powering on and connecting to the internet, the Mac Mini communicates with Apple’s activation servers. The activation servers identify the device as part of the organization’s ADE and redirect it to the Jamf MDM server, ensuring automatic enrollment without user input.
Enrollment and configuration
The Mac Mini enrolls into the Jamf MDM system automatically. Jamf applies predefined configuration profiles to set up the device’s settings, installs required applications based on configured policies, and enforces security policies such as encryption and authentication settings to ensure compliance.
Key benefits of zero-touch provisioning
Efficiency: Devices are ready to use right out of the box, reducing the time and effort required by IT staff.
Consistency: Ensures that all devices are configured uniformly according to organizational policies.
Security: Enforces security policies from the moment the device is first powered on, reducing vulnerabilities.
Scalability: Easily manage and configure a large number of devices without manual intervention.
Learnings and insights
Supply chain is as fast as the last essential component you need
The efficiency of a supply chain hinges on the delivery of its final essential component. Despite being a fundamental principle, it’s worth reiterating. Our timely launch was facilitated by a buffer period for unexpected delays. Interestingly, one of the last critical items to arrive was the rack mounting trays. The brief delay underscored the importance of prioritizing and planning for on-time delivery of every essential component, irrespective of its manufacturing simplicity.
Consistently address the question: How will this scale?
From the outset, our goal was to develop a scalable infrastructure. As the cluster expands, tasks such as preparing Mac minis for job acceptance require increasing manual input, which ultimately impacts costs. Hence, zero-touch provisioning becomes essential, as scalability is not merely a desirable feature but a necessity.
Plan and opt in for a power cost structure best suite for your need
Power cost structures
In a colocation setup power costs can be billed in several ways, each with pros and cons:
Flat Rate Per Circuit: A fixed monthly fee, predictable but limits flexibility (e.g., can’t exceed 80% without extra circuits).
Allocated kW: Commit to a fixed power amount (e.g., 100 kW), potentially cheaper but with penalties for overages.
Metered Usage: Pay for actual consumption (kWh), good for variable loads but may still charge for space.
All-In Space & Power: Single rate covering both, easy to compare but less flexible for upgrades.
We ultimately opted for an allocated kW commitment, a phased approach based on conservative equipment power ratings and historical usage. We structured this into phases of commitment increases for future capacity growth.
Conclusion
The Mac Cloud Exit wasn’t just a technical migration; it was a strategic move that fundamentally enhanced our engineering efficiency. By onshoring our infrastructure into Southeast Asia, we have achieved $2.4 million USD in projected savings and supercharged our CI pipeline, delivering performance gains of 20-40%. This project proves that taking ownership of our core infrastructure can be a major competitive advantage, allowing us to deliver faster and more reliably for our users across the region.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
In the world of digital services, accurate extraction of information from user-submitted documents such as identification (ID) cards, driver’s licenses, and registration certificates is a critical first step for processes like electronic know-your-customer (eKYC). This task is especially challenging in Southeast Asia (SEA) due to the diversity of languages and document formats.
We began this journey to address the limitations of traditional Optical Character Recognition (OCR) systems, which struggled with the variety of document templates it had to process. While powerful proprietary Large Language Models (LLMs) were an option, they often fell short in understanding SEA languages, produced errors, hallucinations, and had high latency. On the other hand, open-sourced Vision LLMs were more efficient but not accurate enough for production.
This prompted us to fine-tune and ultimately develop a lightweight, specialized Vision LLM from the ground up. This blog is our account of the entire process.
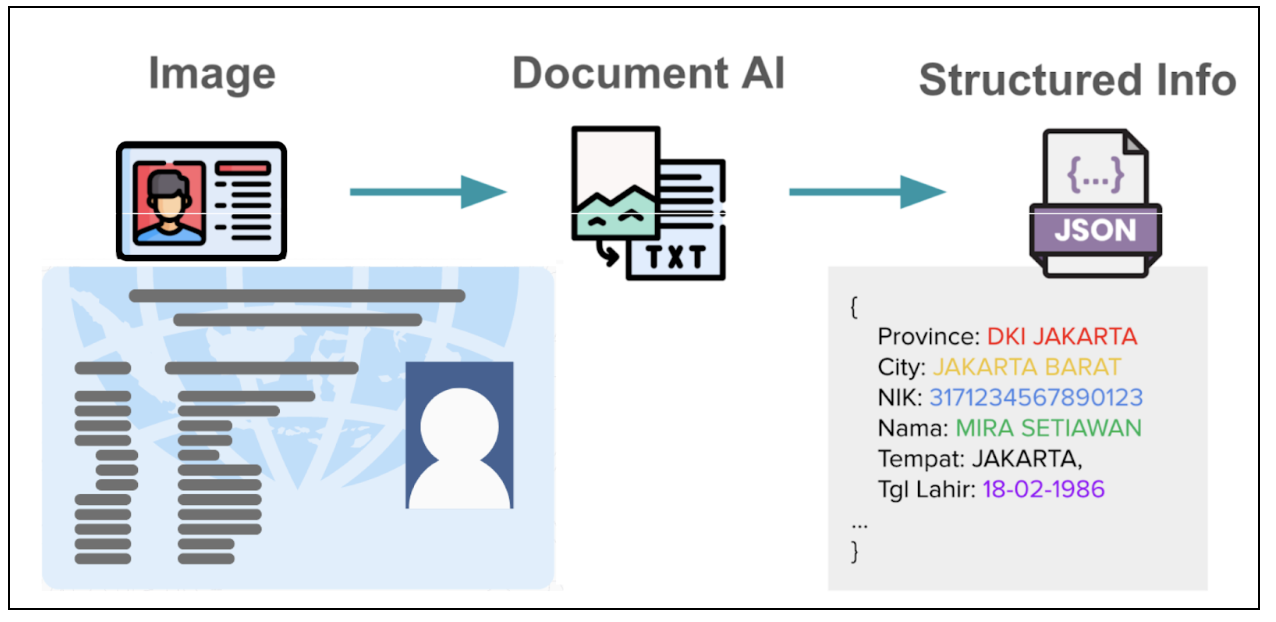
Figure 1: Simplified overview of how Vision LLM works.
Background
What is a Vision LLM?
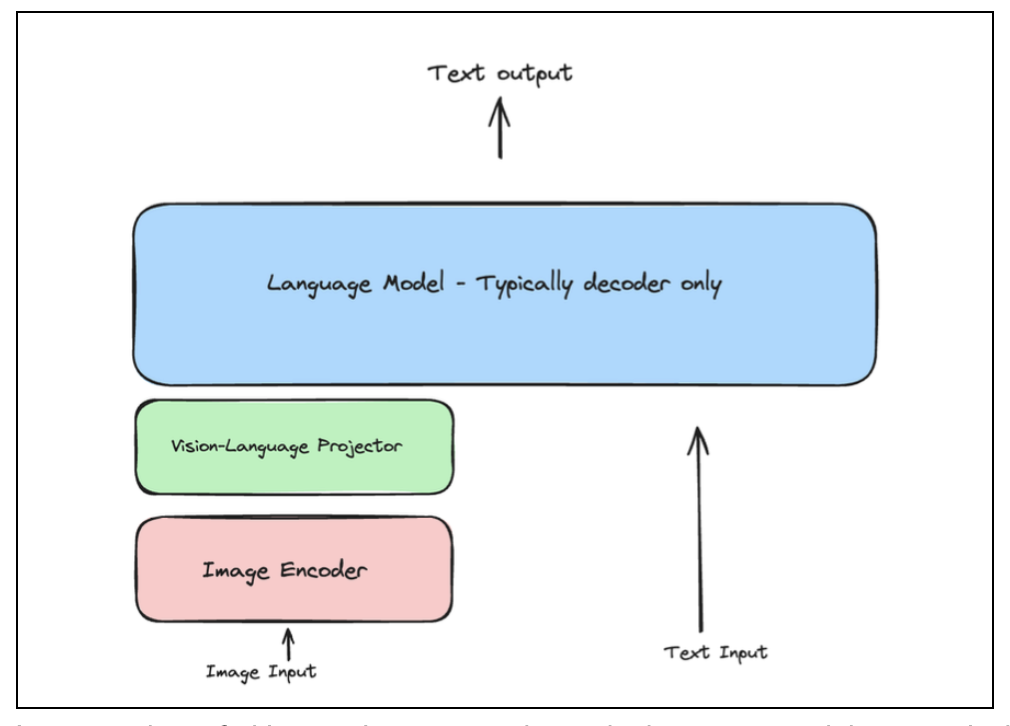
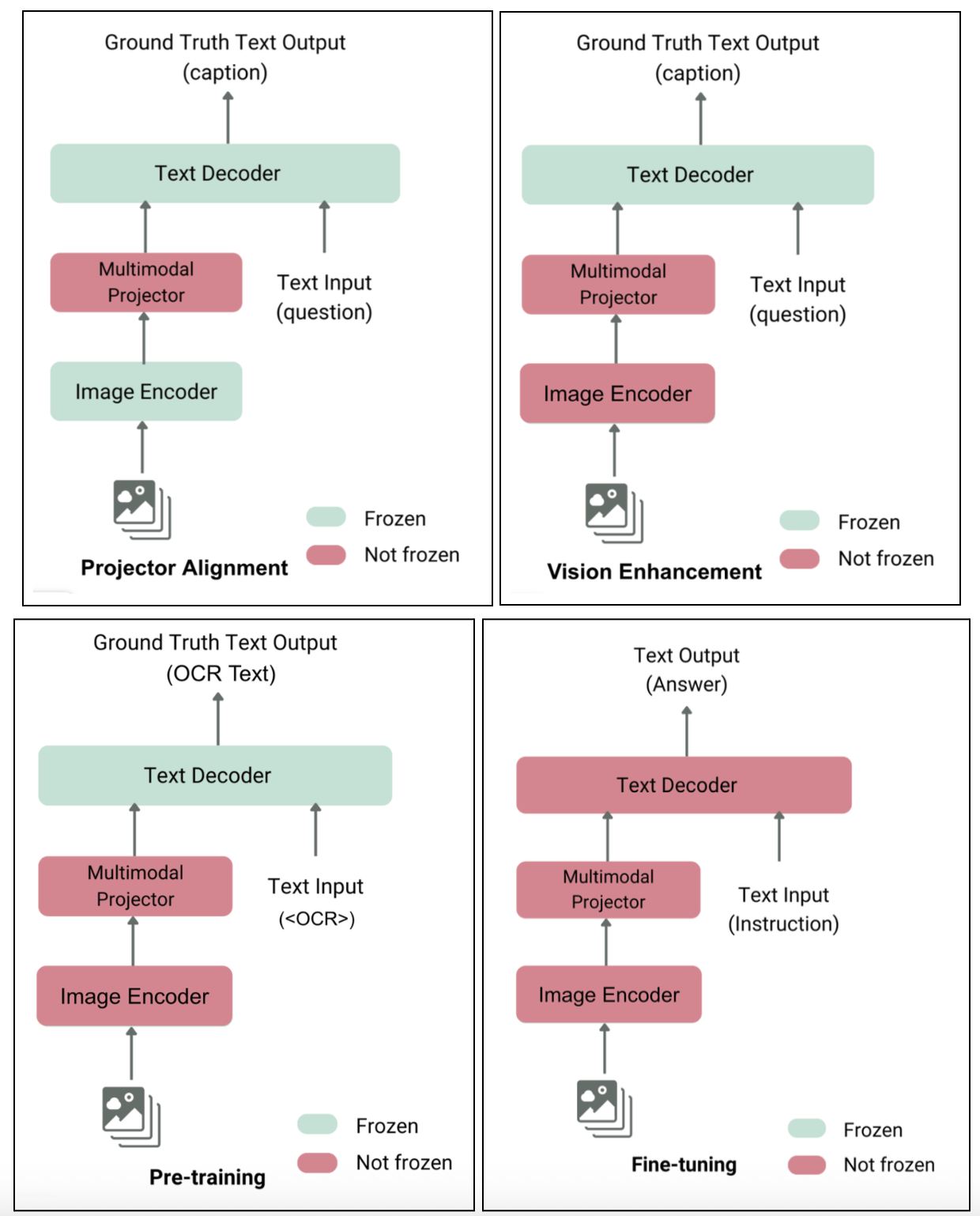
You’ve likely heard of LLMs that process text. You give the LLM a text prompt, and it responds with a text output. A Vision LLM takes this a step further by allowing the model to understand images. The basic architecture involves three key components:
Image encoder: This component ‘looks’ at an image and converts it into a numerical (vectorized) format.
Vision-language projector: It acts as a translator, converting the image’s numerical format into a representation that the language model can understand.
Language model: The familiar text-based model that processes the combined image and text input to generate a final text output.
Figure 2: Vision LLM basic architecture.
Choosing our base Vision LLM model
We evaluated a range of LLMs capable of performing OCR and Key Information Extraction (KIE). Our exploration of open-source options—including Qwen2VL, miniCPM, Llama3.2 Vision, Pixtral 12B, GOT-OCR2.0, and NVLM 1.0—led us to select Qwen2-VL 2B as our base multimodal LLM. This decision was driven by several critical factors:
Efficient size: It is small enough for full fine-tuning on GPUs with limited VRAM resources.
SEA language support: Its tokenizer is efficient for languages like Thai and Vietnamese, indicating decent native vocabulary coverage.
Dynamic resolution: Unlike models that require fixed-size image inputs, Qwen2-VL can process images in their native resolution. This is crucial for OCR tasks as it prevents the distortion of text characters that can happen when images are resized or cropped.
We benchmarked Qwen2VL and miniCPM on Grab’s dataset. Our initial findings showed low accuracy, mainly due to the limited coverage of SEA languages. This motivated us to fine-tune the model to improve OCR and KIE accuracy. Training the LLM can be a very data-intensive and GPU resource-intensive process. Due to this, we had to address these two concerns before progressing further:
Data: How do we use open source and internal data effectively to train the model?
Model: How do we customize the model to reduce latency but keep high accuracy?
Training dataset generation
Synthetic OCR dataset
We extracted the SEA languages text content from a large online text corpus—Common Crawl (internet dataset). Then, we used an in-house synthetic data pipeline to generate text images by rendering SEA text contents in various fonts, backgrounds and augmentations.
The dataset contains text in Bahasa Indonesia, Thai, Vietnamese, and English. Each image has a paragraph of random sentences extracted from the dataset as shown in Figure 3.
Figure 3: Two synthetic sample images in Thai language used for model training.
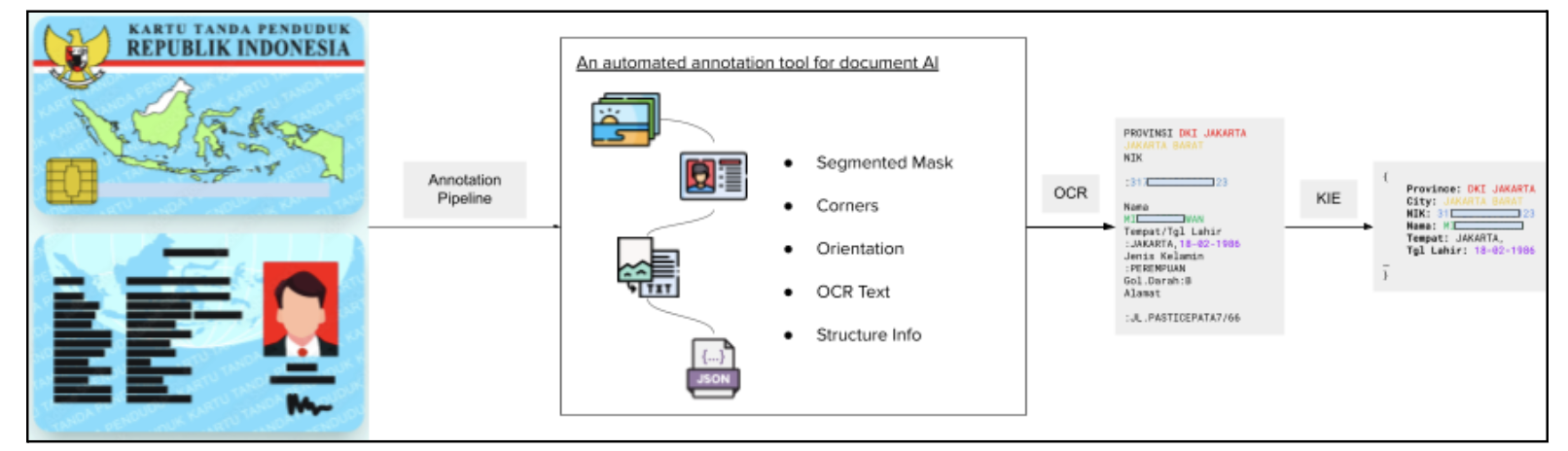
Documint: AI-powered, auto-labelling framework
Our experiments showed that applying document detection and orientation correction significantly improves OCR and information extraction. Now that we have an OCR dataset, we needed to generate a pre-processing dataset to further improve model training.
Documint is an internal platform developed by our team that creates an auto‑labelling and pre‑processing framework for document understanding. It prepares high‑quality, labelled datasets. Documint utilizes various submodules to effectively execute the full OCR and KIE task. We then used a pipeline with the large amount of Grab collected cards and documents to extract training labels. The data was further refined by a human reviewer to achieve high label accuracy.
Documint has four main modules:
Detection module: Detect the region from the full picture.
Orientation module: Gives correction angle (e.g. if document is upside down, 180 degrees).
OCR module: Returns text values in unstructured format.
KIE module: Returns JSON values from unstructured text.
Figure 4: Pipeline overview of Documint.
Experimentation
Phase 1: The LoRA experiment
Our first attempt in fine-tuning a Vision LLM involved fine-tuning an open-source model Qwen2VL, using a technique called Low-Rank Adaptation (LoRA). LoRA is efficient because it allows lightweight updates to the model’s parameters, minimizing the need for extensive computational resources.
We trained the model on our curated document data, which included various document templates in multiple languages. The performance was promising for documents with Latin scripts. Our experiment of LoRA fine-tuned Qwen2VL-2B achieved high field-level of accuracy for Indonesian documents.
However, the fine-tuned model still struggled with:
Documents containing non-Latin scripts like Thai and Vietnamese.
Unstructured layouts with small, dense text.
Phase 2: The power of full fine-tuning
Our experiments revealed a key limitation. While open-source Vision LLMs often have extensive multi-lingual corpus coverage for the LLM decoder’s pre-training, they lack visual text in SEA languages during vision encoder and joint training. This insight drove our decision to pursue full parameter fine-tuning for optimal results.
Figure 5: From left to right—two-stage training process.
Stage 1 – Continual pre-training: We first trained the vision components of the model using synthetic OCR datasets that we created for Bahasa Indonesia, Thai, Vietnamese, and English. This helps the model to learn the unique visual patterns of SEA scripts.
Stage 2 – Full-parameter fine-tuning: We then fine-tuned the entire model—vision encoder, projector, and language model—using our task-specific document data.
Results:
Table 1: OCR Field level accuracy between the baseline and Qwen2-VL 2B model. (pp: percentage points).
The fully fine-tuned Qwen2-VL 2B model delivered significant improvement, especially on documents that the LoRA model struggled with.
Thai document accuracy increased +70pp from baseline.
Vietnamese document accuracy rose +40pp from baseline.
Phase 3: Building a lightweight 1B model from scratch
While the Qwen2VL-2B model was a success, the full fine-tuning pushed the limits of GPUs. To optimize resources used and to create a model perfectly tailored to our needs, we decided to build a lightweight Vision LLM (~1B parameters) from scratch.
Our strategy was to combine the best parts of all models:
We took the powerful vision encoder from the larger Qwen2-VL 2B model.
We paired it with the compact and efficient language decoder from the Qwen2.5 0.5B model.
We connected them with an adjusted projector layer to ensure they could work together seamlessly.
This created a custom ~1B parameter Vision LLM optimized for training and deployment.
Four stages in training our custom model
We trained our new model using a comprehensive four-stage process as shown in Figure 6.
Figure 6: From left to right— four stages of model training.
Stage 1 – Projector alignment: The first step was to train the new projector layer to ensure the vision encoder and language decoder could communicate effectively.
Stage 2 – Vision tower enhancement: We then trained the vision encoder on a vast and diverse set of public multimodal datasets, covering tasks like visual Q&A, general OCR, and image captioning to improve its foundational visual understanding.
Stage 3 – Language-specific visual training: We trained the model on two types of synthetic OCR data. Without this stage, performance on non-Latin documents dropped by as much as 10%.
Stage 4 – Task-centric fine-tuning: Lastly, we performed full-parameter fine-tuning on our custom 1B model using our curated document dataset.
The final results are as follow:
Accuracy:
It achieved performance comparable to the larger 2B model, staying within a 3pp accuracy gap across most document types. The model also maintained strong generalization when trained on quality-augmented datasets.
Latency:
The latency of our model far outperforms the 2B model, as well as traditional OCR models, as well as external APIs like chatGPT or Gemini. One of the biggest weaknesses we identified with external APIs was the P99 latency, which can easily be 3 to 4x the P50 latency, which would not be acceptable for Grab’s large scale rollouts.
Table 2: Performance comparison between Qwen2-VL 2B and 1B sized Vision LLM.
Key takeaways
Our work demonstrates that strategic training with high-quality data enables smaller, specialized models to achieve remarkable efficiency and effectiveness. Here are the critical insights from our extensive experiments:
Full fine-tuning is superior: For specialized, non-Latin script domains, full-parameter fine-tuning dramatically outperforms LoRA.
Lightweight models are effective: A smaller model (~1B) built from scratch and trained comprehensively can achieve near state-of-the-art results, validating the custom architecture.
Base model matters: Starting with a base model that has native support for your target languages is crucial for success.
Data is king: Meticulous dataset preprocessing and augmentation plays a critical role in achieving consistent and accurate results.
Native resolution is a game changer: A model that can handle dynamic image resolutions preserves text integrity, dramatically improves OCR capabilities.
Our journey demonstrates that specialized Vision LLMs can effectively replace traditional OCR pipelines with a single, unified, highly accurate model—opening new possibilities for document processing at scale.
Table 3: Comparison of model types .
What’s next?
As we continue to enhance our Vision LLM capabilities, exciting developments are underway:
Smarter, more adaptable models: We’re developing Chain of Thought-based OCR and KIE models to strengthen generalisation capabilities and tackle even more diverse document scenarios.
Expanding across Southeast Asia: We’re extending support to all Grab markets, bringing our advanced document processing to Myanmar, Cambodia, and beyond.
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
As Grab transitions to derive more valuable insights from our wealth of operational data, we are witnessing a steep increase in stream-processing applications. Over the past year, the number of Flink applications grew 2.5 times, driven by interest in real-time stream processing and the improved accessibility of developing such applications with Flink SQL. At this scale, it has become crucial for the internal Flink platform team to provide a cost-effective and self-service offering that supports users of diverse backgrounds.
Background: Flink at Grab
Flink at Grab is deployed in application mode, each pipeline has its own isolated resources for JobManager and TaskManager. Flink pipeline creators control both application logic and deployment configuration that affect throughput and performance, including OSS configurations:
Number of TaskManagers and task slots per TaskManager
CPU cores per TaskManager
Memory per TaskManager
As pipeline creation has become more accessible, users of different backgrounds (analyst, data scientist, engineers, etc.) often struggle to choose a set of configurations that work for their applications. Many go through a long process of trial and error and still end up over-provisioning their applications, leading to huge resource waste. Moreover, pipeline behavior changes over time due to changes in application logic or data pattern, invalidating previous efforts in tuning and causing users to repeat the exercise.
In this article, we focus on addressing the challenge of efficient CPU provisioning for TaskManagers, as CPU constraints are a common bottleneck in our clusters. Our solution specifically targets Flink applications sourcing data from our message bus system (eg. Kafka, Change Data Capture Streams, DynamoDB Streams) , which represents the majority of our use cases. These workloads offer significant opportunities for cost savings due to their clear seasonal patterns, making them an ideal starting point for optimising autoscaling strategies.
Limits of reactive autoscaling
Our initial reactive setup
Our first automated solution relied on Flink’s Adaptive Scheduler in Reactive Mode. In this mode, each Flink application is deployed as its own individual Flink cluster running a dedicated job. The cluster greedily uses all available TaskManagers and scales its job parallelism accordingly. Running on Kubernetes, the cluster relies on Horizon Pod Autoscaler (HPA) to scale the number of TaskManager pods based on metrics such as CPU usage or custom metrics such as the pipeline’s consumer latency. While this solution was helpful initially, we quickly observed multiple issues with it.
It is important to note that while the below issues can be solved by fine-tuning, it is a tedious trial and error effort that only works for specific applications, requiring users to repeat the process for every pipeline they own.
Restart spike: root cause of many issues
When autoscaling a Flink pipeline, the job restarts from the last checkpoint. This triggers an immediate spike in load, as the pipeline must reprocess records from the period between the last checkpoint and job restart, along with any new records that were backlogged at the source during the downtime. As a result, CPU usage and P99 consumer latency typically spikes after scaling events, for example, at 00:05 and 00:55, as shown in Figure 1. These spikes occur even though there is no change in source topic throughput. In this case, CPU usage surges from 0.5 cores to near provision limit of 2.5 cores, while consumer latency temporarily spiked from sub-second levels to as high as three minutes.
Figure 1: CPU usage and consumer latency spike after a pipeline restart.
Reactive spiral and fluctuation
Typically, HPA scales on metrics such as CPU usage, consumer latency, or backpressure crossing a defined threshold. The challenge arises if these thresholds are misconfigured. The HPA’s reactive nature, when combined with restart spikes, can become detrimental to your Flink application. It piles additional load onto a system that’s already degrading, further amplifying the problem.
Figure 2: A reactive scaling incident that demonstrates scaling fluctuations and restarts.
Figure 2 provides us a case study of reactive spiral and fluctuation, assuming we are having a pipeline that consumes a Kafka topic of 300 partitions:
07:00: As the source topic throughput increases, the P99 consumer latency rises due to insufficient processing power.
07:15: Reactive scaling is triggered, resulting in a scale out event. This is reflected in the increased TaskManager and task slot count. The pipeline continues to operate, as there is no increase in restart count.
07:30: As the P99 consumer latency remains high, reactive scaling continues to scale out incrementally. The records in rate by task rises rapidly as the pipeline reprocesses data from the checkpoint. During this period, the pipeline repeatedly restarts CPU usage drops significantly, and P99 consumer latency spikes to nearly one hour. This marks the onset of a spiral failure.
08:00: Reactive scaling reaches its upper limit of 300 slots, corresponding to the number of partitions in the source topic. This halts the spiral effect as it cannot scale out any further. Without disruption from autoscaling restart, the pipeline begins to process the backlog since the last successful checkpoint, as observed by the significant increase in records in rate by task. As the pipeline catches up, it eventually stabilizes, and the P99 consumer latency returns to normal levels.
08:30 – 10:15: The P99 consumer latency returns to normal levels, below the threshold. Reactive scaling triggers scale-in events despite the source topic throughput continuing to trend upward. During these scale-in events, P99 latency fluctuates, occasionally spiking up to 15 minutes. However, these fluctuations are not severe enough to prevent the repeated scale in process.
10:15: The P99 consumer latency rises again, triggering a scale-out event back to the upper limit of 300 slots.
11:15-11:45: Despite the source topic throughput maintaining an upward trend, the pipeline undergoes multiple scale-in events in quick succession, encounters latency issues due to reprocessing data from checkpoints, and scales out again shortly after. This is an example of fluctuation after scaling in, resulting in 6 restarts within a 30 minutes window.
Limited parallelism constraints
Even with HPA, we frequently encounter a bottleneck when trying to scale our applications’ throughput. This is primarily because some of our connectors, most notably the Kafka connector, don’t inherently support dynamic parallelism changes.
Kafka topics, by design, have a fixed number of partitions. This directly limits the number of parallel consumers we can run. Consequently, once we reach this maximum parallelism for our consumers, we often have to scale up resources, for example, increase memory/CPU per instance instead of scaling out (adding more instances).
Predictive Resource Advisor
Assumptions and hypothesis
To tackle the issue of reactive spirals and fluctuations, the new solution should have the following characteristics:
Vertical scaling: To tackle the issue of limited parallelism with our dependencies, we should be looking at vertical instead of horizontal scaling.
Predictive: Adjust CPU to scale up or down before demand spikes or dips occur, ensuring the system is prepared for changes in workload. This prevents artificial workload increases caused by processing backlogs on top of actual workload increase, further straining the system.
Deterministic: The CPU configuration must be precisely calculated based on the workload demand, ensuring predictable and consistent resource allocation. For a given workload, the calculated CPU value should remain the same every time, eliminating variability and uncertainty in scaling decisions.
Accurate: Determine the optimal CPU configuration required to handle workload demand in a single, precise calculation, avoiding the inefficiencies of multi-step, trial-and-error tuning.
Key observations
Our solution is conceptualized based on key observations of our Flink applications:
The CPU usage of Flink applications is primarily driven by the input load.
The input load of our Flink applications can be accurately forecasted using time-series forecasting techniques.
Time-based autoscaling that relies solely on historical CPU usage is not robust enough to adapt to evolving workloads. This approach also carries the risk of a negative self-amplifying feedback loop: each autoscaling restart causes a CPU usage spike (as illustrated in Figure 1), which, if anomalies are not properly handled, inflates subsequent CPU calculations.
Model formulation
We then formulate the relationship between CPU usage and input load using a regression model to provide a mathematical framework for predicting CPU requirements based on workload patterns, expressed as:
Ct = f(xt)
In this equation:
Ct represents the CPU required at a specific point in time.
xt represents the input workload at the corresponding point in time.
f() represents the regression function that maps the input load to the required CPU capacity.
Input load, represented by Kafka source topic throughput in our case, is chosen as the independent variable xt because it reflects true business demand and is entirely independent of Flink consumers. This metric is influenced solely by the business logic of upstream producers and remains unaffected by any changes or behaviors in the Flink consumer pipeline.
Proposed solution
Our predictive autoscaler operates through four key stages as shown in Figure 3.
Figure 3: The predictive autoscaling system operates through four key stages.
Stage 1: Workload forecast model
The workload forecast model is a time-series forecasting model trained on actual workload data, specifically source topic throughput from our Kafka cluster (1). This approach is particularly effective as our workload exhibits seasonal patterns. While historical data could be directly used as input for CPU prediction, time-series forecasting offers a more robust solution by enabling the model to account for organic traffic growth over time. Through periodic retraining, the model adapts to evolving workload trends, ensuring more accurate and reliable predictions for resource provisioning.
Stage 2: Resource prediction model
This follows the regression-based model Ct = f(xt) defined earlier. We use the same source topic throughput from our Kafka cluster (2a) as input feature xt, and the Flink application’s Kubernetes CPU usage metric (2b) as output label Ct for model training. To ensure clean and representative data for model training, we collect CPU usage metrics under conditions that simulate infinite resource availability. We include data exclusively from periods of continuous and stable operation, as determined by latency, uptime, and restart metrics (2b), eliminating biases caused by hardware limitations or disruptions.
Stage 3: Workload forecasting
To prepare for autoscaling, we forecast the workload for the future t-hour window (3) using our trained time-series forecast model.
Stage 4: Predict CPU usage
The forecasted workload (3) is fed into the resource prediction model to estimate the CPU usage required to handle that workload. The predicted value is then refined using custom safety feature adjustments to account for variability and ensure stability. This adjusted prediction is passed to the custom autoscaler controller, which evaluates the current CPU configuration of the TaskManager deployment. If the adjusted predicted value differs from the existing CPU configuration, the controller initiates vertical scaling to update the TaskManager deployment accordingly.
Proof of concept and results
Experiment setup
To validate our hypothesis, we present a deep dive into one of our experiments. This pipeline features complex business logic, aggregates from multiple Kafka sources, with a checkpoint interval of one minute and a maximum consumer latency of five minutes.
We set up an experimental pipeline with configurations identical to the production pipeline (the control). Both applications sourced data from the same Kafka topics but sank data to alternative topics to maintain isolation. The Predictive Resource Advisor was enabled on the experimental pipeline, while the control pipeline operated with fixed CPU provisioning.
Results
Figure 4 demonstrates a strong correlation between CPU usage (yellow, green) and the total Kafka topics throughput. The variable CPU provisioning (blue) for the experimental pipeline is calculated by our autoscaler models, which were trained exclusively on data collected from the experiment pipeline. The CPU usage trend of the experimental pipeline closely mirrors that of the control pipeline and remains aligned with the Kafka throughput trend. However, the experimental pipeline’s CPU provisioning is dynamically adjusted to more closely match its actual CPU usage, whereas the control pipeline maintains a static CPU allocation (purple). This illustrates the model’s effectiveness in dynamically adjusting CPU allocation to meet variable workload demands.
Figure 4: CPU usage closely correlates with source throughput for both the experimental and control pipelines.
Without autoscaler enabled, the control pipeline experienced no disruptions and maintained latency (blue) consistently below one second, which is not visible in Figure 5. On the other hand, the experiment pipeline latency (red) experienced a highest recorded peak latency of just over four minutes during a single disruption window. Other latency spikes observed were comparable to or lower than the three minutes peak latency previously identified as part of the restart spike issue analysis. The varied durations and amplitudes of these spikes showed some correlation with the heavy Kafka topic throughput during those periods. Importantly, there were only nine autoscaling events throughout the day, resulting in nine restarts for the experiment pipeline.
Figure 5: Autoscaling impacts service-level agreement requirements through latency spikes during scaling events.
Outcome
The Predictive Resource Advisor solution has been successfully deployed across more than 50% of applicable production applications, specifically those consuming from Kafka topics and exhibiting seasonal workload patterns with some tolerance for disruptions. This implementation has delivered significant results across three key areas, stability, efficiency, and user experience.
Stability
With autoscaling becoming more predictable and controllable, our Flink applications experience fewer disruptions caused by autoscaling fluctuations. The machine learning and predictive capabilities of the solution also ensure that applications remain operational during periods of increased workload by automatically learning and adapting to organic growth trends and workload surges.
Efficiency
Applications powered by the Predictive Resource Advisor demonstrated significant improvements in CPU provisioning, aligning CPU configuration more closely with actual requirements, particularly during low traffic periods. As a result of this optimization, on average, these applications made approximately >35% savings in cloud infrastructure cost.
User experience
The solution has simplified the deployment process for users, allowing them to simply deploy Flink applications with default configurations. The Predictive Resource Advisor automatically collects data, trains autoscaling models, and applies configuration changes, thus eliminating the need for manual fine-tuning. This significantly enhances the user experience by streamlining pipeline maintenance and enabling self-service capabilities, such as effortless onboarding. It empowers users to explore and derive value from real-time features with minimal effort.
What’s next?
Our journey doesn’t stop here. We’re continuously working to enhance our predictive autoscaler, with the following key areas of focus:
Tackling memory configuration (Predictive Resource Advisor’s next frontier)
Memory is critical yet often misconfigured that can lead to unrecoverable failures for example, OOMKilled. Our next major goal for the Predictive Resource Advisor is to take on memory tuning, completely removing the burden of complex memory configuration from our users and further empowering them.
Enhancing model accuracy
To further improve the robustness of our predictions, we are actively exploring advanced techniques in input feature engineering and anomaly detection, especially for workloads exhibiting frequent bursting patterns. By refining these aspects, we aim to extend the applicability of our solution to a broader range of Flink applications, including those connected to diverse sources such as change data capture systems or batch-like, spiky workloads, such as the Flink applications powering our real-time data lake.
Streamlining model training
We’re developing a more efficient model training workflow. A particularly exciting avenue we’re investigating is the use of pretrained time-series forecasting models based on large language model architectures.
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
Catwalk is Grab’s machine learning (ML) model serving platform, designed to enable data scientists and engineers in deploying production-ready inference APIs. Currently, Catwalk powers hundreds of ML models and online deployments. To accommodate this growth, the platform has adapted to the rapidly evolving machine learning technology landscape. This involved progressively integrating support for multiple frameworks such as ONNX, PyTorch, TensorFlow, and vLLM. While this approach initially worked for a limited number of frameworks, it soon became unsustainable as maintaining various inference engines, ensuring backward compatibility, and managing deprecated legacy components (such as the ONNX server) introduced significant technical debt. Over time, this resulted in degraded platform performance: with increased latency, reduced throughput, and escalating costs. These issues began to impact users, as larger models could no longer be served efficiently or cost-effectively by legacy components. Recognising the need for change, the team revisited the platform’s design to address these challenges.
Evaluation and implementation
After evaluating other industry-leading model serving platforms and studying best practices, we decided to conduct an in-depth analysis of NVIDIA Triton. Triton offers significant advantages as an inference engine, including:
Multi-framework support: Compatibility with major ML frameworks, including ONNX, PyTorch, and TensorFlow, ensuring versatility and broad applicability.
Unified inference interface: Provides a single, consistent API for various ML frameworks, simplifying user interaction and reducing overhead when switching between models or frameworks.
Hardware optimisation: Optimised for NVIDIA GPUs, Triton delivers strong performance on CPU-only environments and specialised instances like AWS Inferentia.
Up-to-date support: Continuously updated by upstream to support the latest optimisation and features from upstream ML frameworks, ensuring access to cutting-edge capabilities.
Advanced inference features: Includes capabilities like dynamic batching and model ensembling (model pipelining), which enhances throughput and efficiency for complex ML workflows.
Our extensive benchmarking demonstrated that NVIDIA Triton delivers substantial enhancements in both performance and service stability compared to our existing solutions.
We are now working towards consolidating the various inference engines we manage into a unified, all-in-one Triton engine, beginning with ONNX adoption as the first phase of implementation.
In this blog, we aim to share our journey of adopting Triton. From initial benchmarking results on one of Grab’s core models facing performance challenges, to the development of the “Triton manager”, a component designed to integrate Triton into our platform seamlessly and with minimal user disruption. Ultimately, more than 50% of online deployments were successfully migrated to Triton, with some of our critical systems achieving a 50% improvement in tail latency.
Exploratory benchmark results
We conducted rigorous testing of Triton against our existing ONNX server under varying levels of request traffic.
Table 1: Benchmark results of Triton against Catwalk ONNX server.
During testing with a transformer-based model, Triton demonstrated the ability to handle at least 5 times the traffic while maintaining excellent latency. Additionally, its performance was further enhanced with features like batching enabled, and there is potential for even greater optimisation by converting the model to TensorRT, leveraging GPU support.
Through profiling, we learned that a handful of ONNX Runtime knobs have an outsized impact on throughput. One low-effort, high-return tweak is to set the intra-op thread count to match the number of physical CPU cores. In most cases, this single change yields a healthy performance lift, sparing us from time-consuming, model-by-model micro-optimisation.
Adopting Triton at scale
While the benchmark results clearly demonstrate Triton’s advantages, the primary challenge was ensuring a seamless migration, ideally with minimal user reactions. Given the high frequency of migrations within our company, even exceptional performance improvements are often insufficient to fully motivate internal users to adopt new systems. From our point of view, a successful migration required:
Maintaining API compatibility with existing systems.
Ensuring zero-downtime.
Preserving all existing functionality while adding new capabilities.
Minimising disruption to downstream services and users.
To streamline the migration process, we opted to manage it centrally within our platform, rather than relying on individual users to address the details themselves.
We landed on the idea of offering Triton to our users as a drop-in replacement for the old server, with the help of a new component, “Triton manager”. The Triton manager is a critical component that glues Triton to the Catwalk ecosystem. It consists of two major components: Triton server manager and Triton proxy.
Triton server manager is designed as the entry point of our Catwalk Triton. It downloads the model from remote storage, runs verification on the model files, prepares per-model configurations based on users’ customisation, and lastly it launches the Triton server. It also periodically checks the server’s health and provides observability overlooking the server’s status.
Triton proxy provides backward compatibility to the existing clients. It hosts endpoints that translate requests from the older API and forward them to the Triton server. The proxy layer plays a crucial role in facilitating a seamless transition from our legacy servers, eliminating the need for user code changes. The conversion logic is designed to prioritise performance, ensuring minimal overhead. Extensive benchmarks were conducted during development to validate and optimise its efficiency.
Figure 1: High-level architecture for Triton Inference Server (TIS) deployment at Catwalk.
Finally, a special mode in the Triton server manager is implemented to allow the Triton Inference Server (TIS) to be backward compatible with the command line interface of the existing ONNX runtime server used in Catwalk.
We plan to enhance the Triton Manager to ensure backward compatibility with other ML frameworks, as part of our efforts to onboard additional frameworks seamlessly.
Rollout result
Within just 10 days of Triton’s availability, we successfully rolled it out to over 50% of our online model deployments. Thanks to rigorous testing for backward compatibility, the rollout was seamless, with most users unaware of the transition while benefiting from the improved performance.
Triton’s impacts on critical models
Figure 2: Latency before and after rollout in ms. Blue line: XGBoost-based model. Orange line: transformer-based model. Solid line: average. Dashed line: p99
We’ve observed significant performance improvements in our business-critical models that have high demands for stability. Latency improvements were consistently observed in all models, especially in the models that suffered from highly volatile request traffic. For some larger transformer models, the p90 latency decreased dramatically from 120ms to 20ms, and the average latency remained steady at 4ms. Smaller XGBoost models maintained their average latency at 2ms across regions.
Figure 3: Number of pods, before (blue line) and after (purple line) rollout in another model.
Triton has delivered significant cost savings for certain models, with some achieving over 90% reductions due to its advanced optimisations. These improvements have come alongside enhanced performance and reliability.
It is worth noting that Triton was initially rolled out with limited capabilities to prioritise backward compatibility and ensure a seamless migration. However, we’ve noticed that higher tail latency still remains an issue when facing request spikes for larger models in production. To address this, we are working on enabling batching through Triton to minimise tail latency during traffic surges. This effort will involve close collaboration with model owners to optimise the capacity of each Triton instance further.
Early cost impact of the migration
To gauge the financial upside of migrating to Triton, we took a snapshot of 11 production ML services that had already completed the migration. For every ML service, we compared its infrastructure spend over the 14 days before the cut-over with the 14 days after.
Despite the staggered migration dates, the trend was uniform: average spend fell by ~ 20% across this small cohort within 14 days. As more models and applications migrate, we expect the absolute dollar savings to scale proportionally.
Takeaways
Initial results are aligned with our benchmarks for the Triton migration. With improved performance and cost reduction, we expect model owners to either upgrade their model sizes or allow for higher Queries Per Second (QPS). While making further progress with the overall Triton migration, the model serving platform team will continue to monitor cost differences and provide consultation to model owners who seek further optimisation for their deployments.
Another key takeaway is the painless migration of Triton for our internal users. Rather than asking internal users to make necessary code changes, our team dedicated significant time to providing Triton as a drop-in inference engine to minimise any inconvenience of migration.
Big appreciation to Shengwei Pang from the Geo team, Khai Hung Do, Nhat Minh Nguyen, and Siddharth Pandey from the Catwalk team, along with Richard Ryu from the PM team and Padarn George Wilson for the sponsorship.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
Ah, the familiar beep beep beep but don’t worry, it’s not your alarm coaxing you out of bed. No, this is far worse: the dreaded PagerDuty on-call alert! What’s the crisis this time? There appears to be an issue with high database CPU utilisation, overwhelmed by a flood of heavy traffic. If you’re a developer, chances are you’ve faced this scenario at least once. The very moment when you question every life decision while desperately searching for answers at 3 AM.
This article was born of one such heart-pounding, adrenaline-fuelled incident. Picture this: the database was struggling, the traffic was relentless, and the team was caught in the crossfire. The seemingly obvious solution was to migrate from SQL to NoSQL—a straightforward fix, or so it seemed. Instead of taking the easy way out, we stepped back, rolled up our sleeves, and tackled the problem head-on, embarking on a bold journey of optimisation.
What followed was a rollercoaster of trial, error, and a few “why did we even try this” moments. Yet, isn’t that the beauty of being a developer? Embracing the chaos, thriving in the madness, and eventually emerging victorious with a story worth sharing.
Real-time usage count tracking is a common use case that can be found across many applications, like Instagram’s post like count, YouTube’s watch count, or a marketing campaign usage count, which is used in monitoring and measuring the performance of marketing campaigns to assess effectiveness. These counts don’t have to be highly accurate, but rather an approximation in most use cases. This meant that in an occurrence of an event, instead of immediately updating the count in the database, the count is cached in the application server and later updated in batches to reduce the database Queries Per Second (QPS) and Central Processing Unit (CPU) utilisation.
This article shares one such use case where we optimised the campaign usage count tracking with highly concurrent in-memory caching that flushes to the database at periodic intervals.
Background
Marketing campaigns are configured to deliver push notifications, emails, and award rewards and points to Grab users. Total usage as well as daily usage needs to be tracked for display purposes to give a sense of how the campaign is performing. In this use case, accuracy is not a top priority. This release in constraint helps us to reduce write traffic by incrementing the counter in-memory and flushing the disk at periodic intervals for persistence.
In this section, let’s break down the process of designing a highly concurrent in-memory counter with data persistence.
Functional requirements
Upsert the counter value for the given key.
Periodically flush the counter value to the storage layer for persistence.
Non-functional requirements
Do note that although consistency is not critical for this use case, we will build a generic in-memory counter with the following guarantees, which can be reused for other use cases:
Highly consistent updates of the counter values in memory during high concurrency.
Consistent flushing of the counter values to the storage layer for persistence.
Simple GoLang code for writing an in-memory counter may look like the code sample shown in Figure 1.
Figure 1. In-memory counter code snippet.
The code has a map declared globally, and the do function increments the counter value against the key. However, this code fails to work when multiple Goroutines (GoLang version of threads) try to access this do function concurrently. This will result in the following error, as shown in Figure 2.
Figure 2. Code error sample.
Maps in GoLang are not thread safe and need to be locked when being accessed concurrently. The GoLang sync package has Mutex, which serves this locking purpose. The code changes are shown in Figure 3. The sync.RWMutex object is declared globally and every time the do function is called, the lock is obtained first. Then the map is mutated, followed by releasing the lock at the end. This code works as intended even when multiple go routines try to access it concurrently.
Figure 3. Implementing sync.RWMutex for locking purpose.
The code for the functional requirement of periodically flushing the counter value to the storage layer is shown in Figure 4.
Figure 4. Code snippet of flushing counter value to storage function.
Assuming that this design is a success, every 200 milliseconds, a background job acquires a global map lock, iterates over all keys, writes each entry to the storage layer asynchronously, then deletes it from the map. After that, a flush is executed where counter increments are blocked until the lock is released.
Can we do something better?
Yes, Sync.Map is the synchronised version of map in GoLang. This can be used to get rid of the explicit locking overheads.
Powerful features of the Sync.Map:
LoadOrStore: Retrieves the existing value for a key if present, or stores and returns a new value if the key is absent. Ensuring atomic operation and preventing race conditions.
CompareAndSwap: Atomically compares a variable’s current value to an expected value. If they match, it is swapped with a new value, ensuring thread-safe updates.
LoadAndDelete: Atomically retrieves and removes the value of a given key, returning the value and a boolean indicating if the key was present.
When combined, these Sync.Map features produce the do function shown in Figure 5. When the do function is called, the LoadOrStore function tries to atomically store the key in the map if the key is absent. Otherwise, it returns the current value for the key with the isLoaded variable set to true. If the key is already present, a new value is created by summing up the increment value with the current value and setting it as the new value in the map using the CompareAndSwap function. The compareAndSwap function successfully sets the new value to the key only if the existing value in the map matches the current value. During high concurrency, this can fail, so we recursively retry until the CompareAndSwap replaces the current value with the new value.
Figure 5. Sync.Map features in do function.
The code example for periodically flushing the counter value to the storage layer is shown in Figure 6. In the previous version of the code, it obtained the lock on the entire map and flushed the counter to the storage layer before releasing the lock. However, there is no locking during this flushing operation. Instead, we rely on the LoadAndDelete function to atomically remove a key from the map. This also returns the latest value for the key, which is updated into the storage layer async.
Figure 6. Code snippet of LoadAndDelete function.
Benchmarking
An experiment was conducted on an Apple M1 16 GB RAM machine to test a use case of spawning a maximum of 200 million concurrent Goroutines to increment the counter of 40 keys. The results are:
The approach of using a map with Mutex-based locking took 1 minute and 50 seconds across 5 runs.
The approach of using Sync.Map with atomic updates took 1 minute and 20 seconds across 5 runs.
In summary, getting rid of explicit locking with Sync.Map is ~30% faster than using Mutex to make the map thread safe.
Approach comparison
Map with Mutex
Synchronised map (Sync.Map)
Locks are explicitly taken.
Implicit locks.
Experiment running averaged over 5 runs: 1 minute and 50 seconds
Experiment running averaged over 5 runs: 1 minute and 20 seconds
Time for operation increases linearly with more keys trying to update the counter, as the entire map is locked during update and flush operations.
Time for operation remains almost constant as the map is not locked.
Conclusion
We implemented the Sync.Map approach for our in-memory counter that periodically flushes the campaign usage count in the database. This implementation resulted in the following efficiency improvements:
68% decrease in usage tracking update queries, nose-diving from 140 QPS to just 45 QPS!
Master database experienced a significant reduction in CPU utilisation, decreasing by 48.5%—from 35% to just 18%, alleviating considerable strain on its resources.
Replica databases benefited from a 37% decrease in CPU utilisation, dropping from 19% to a more manageable 12%.
Through this optimisation journey, we successfully overcame the challenging database CPU bottlenecks while avoiding the substantial effort and complexity of migrating from SQL to NoSQL. Who would have thought that a calculated leap of faith could save us so much time, effort, and countless sleepless nights? At times, the most effective solutions arise from taking a step back and approaching the problem with a fresh perspective, rather than rushing towards an immediate fix.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
Building the fastest network requires work in many areas. We invest a lot of time in our hardware, to have efficient and fast machines. We invest in peering arrangements, to make sure we can talk to every part of the Internet with minimal delay. On top of this, we also have to invest in the software we run our network on, especially as each new product can otherwise add more processing delay.
No matter how fast messages arrive, we introduce a bottleneck if that software takes too long to think about how to process and respond to requests. Today we are excited to share a significant upgrade to our software that cuts the median time we take to respond by 10ms and delivers a 25% performance boost, as measured by third-party CDN performance tests.
We’ve spent the last year rebuilding major components of our system, and we’ve just slashed the latency of traffic passing through our network for millions of our customers. At the same time, we’ve made our system more secure, and we’ve reduced the time it takes for us to build and release new products.
Where did we start?
Every request that hits Cloudflare starts a journey through our network. It might come from a browser loading a webpage, a mobile app calling an API, or automated traffic from another service. These requests first terminate at our HTTP and TLS layer, then pass into a system we call FL, and finally through Pingora, which performs cache lookups or fetches data from the origin if needed.
FL is the brain of Cloudflare. Once a request reaches FL, we then run the various security and performance features in our network. It applies each customer’s unique configuration and settings, from enforcing WAF rules and DDoS protection to routing traffic to the Developer Platform and R2.
Built more than 15 years ago, FL has been at the core of Cloudflare’s network. It enables us to deliver a broad range of features, but over time that flexibility became a challenge. As we added more products, FL grew harder to maintain, slower to process requests, and more difficult to extend. Each new feature required careful checks across existing logic, and every addition introduced a little more latency, making it increasingly difficult to sustain the performance we wanted.
You can see how FL is key to our system — we’ve often called it the “brain” of Cloudflare. It’s also one of the oldest parts of our system: the first commit to the codebase was made by one of our founders, Lee Holloway, well before our initial launch. We’re celebrating our 15th Birthday this week – this system started 9 months before that!
commit 39c72e5edc1f05ae4c04929eda4e4d125f86c5ce
Author: Lee Holloway <q@t60.(none)>
Date: Wed Jan 6 09:57:55 2010 -0800
nginx-fl initial configuration
As the commit implies, the first version of FL was implemented based on the NGINX webserver, with product logic implemented in PHP. After 3 years, the system became too complex to manage effectively, and too slow to respond, and an almost complete rewrite of the running system was performed. This led to another significant commit, this time made by Dane Knecht, who is now our CTO.
From this point on, FL was implemented using NGINX, the OpenResty framework, and LuaJIT. While this was great for a long time, over the last few years it started to show its age. We had to spend increasing amounts of time fixing or working around obscure bugs in LuaJIT. The highly dynamic and unstructured nature of our Lua code, which was a blessing when first trying to implement logic quickly, became a source of errors and delay when trying to integrate large amounts of complex product logic. Each time a new product was introduced, we had to go through all the other existing products to check if they might be affected by the new logic.
It was clear that we needed a rethink. So, in July 2024, we cut an initial commit for a brand new, and radically different, implementation. To save time agreeing on a new name for this, we just called it “FL2”, and started, of course, referring to the original FL as “FL1”.
We weren’t starting from scratch. We’ve previously blogged about how we replaced another one of our legacy systems with Pingora, which is built in the Rust programming language, using the Tokio runtime. We’ve also blogged about Oxy, our internal framework for building proxies in Rust. We write a lot of Rust, and we’ve gotten pretty good at it.
We built FL2 in Rust, on Oxy, and built a strict module framework to structure all the logic in FL2.
Why Oxy?
When we set out to build FL2, we knew we weren’t just replacing an old system; we were rebuilding the foundations of Cloudflare. That meant we needed more than just a proxy; we needed a framework that could evolve with us, handle the immense scale of our network, and let teams move quickly without sacrificing safety or performance.
Oxy gives us a powerful combination of performance, safety, and flexibility. Built in Rust, it eliminates entire classes of bugs that plagued our Nginx/LuaJIT-based FL1, like memory safety issues and data races, while delivering C-level performance. At Cloudflare’s scale, those guarantees aren’t nice-to-haves, they’re essential. Every microsecond saved per request translates into tangible improvements in user experience, and every crash or edge case avoided keeps the Internet running smoothly. Rust’s strict compile-time guarantees also pair perfectly with FL2’s modular architecture, where we enforce clear contracts between product modules and their inputs and outputs.
But the choice wasn’t just about language. Oxy is the culmination of years of experience building high-performance proxies. It already powers several major Cloudflare services, from our Zero Trust Gateway to Apple’s iCloud Private Relay, so we knew it could handle the diverse traffic patterns and protocol combinations that FL2 would see. Its extensibility model lets us intercept, analyze, and manipulate traffic from layer 3 up to layer 7, and even decapsulate and reprocess traffic at different layers. That flexibility is key to FL2’s design because it means we can treat everything from HTTP to raw IP traffic consistently and evolve the platform to support new protocols and features without rewriting fundamental pieces.
Oxy also comes with a rich set of built-in capabilities that previously required large amounts of bespoke code. Things like monitoring, soft reloads, dynamic configuration loading and swapping are all part of the framework. That lets product teams focus on the unique business logic of their module rather than reinventing the plumbing every time. This solid foundation means we can make changes with confidence, ship them quickly, and trust they’ll behave as expected once deployed.
Smooth restarts – keeping the Internet flowing
One of the most impactful improvements Oxy brings is handling of restarts. Any software under continuous development and improvement will eventually need to be updated. In desktop software, this is easy: you close the program, install the update, and reopen it. On the web, things are much harder. Our software is in constant use and cannot simply stop. A dropped HTTP request can cause a page to fail to load, and a broken connection can kick you out of a video call. Reliability is not optional.
In FL1, upgrades meant restarts of the proxy process. Restarting a proxy meant terminating the process entirely, which immediately broke any active connections. That was particularly painful for long-lived connections such as WebSockets, streaming sessions, and real-time APIs. Even planned upgrades could cause user-visible interruptions, and unplanned restarts during incidents could be even worse.
Oxy changes that. It includes a built-in mechanism for graceful restarts that lets us roll out new versions without dropping connections whenever possible. When a new instance of an Oxy-based service starts up, the old one stops accepting new connections but continues to serve existing ones, allowing those sessions to continue uninterrupted until they end naturally.
This means that if you have an ongoing WebSocket session when we deploy a new version, that session can continue uninterrupted until it ends naturally, rather than being torn down by the restart. Across Cloudflare’s fleet, deployments are orchestrated over several hours, so the aggregate rollout is smooth and nearly invisible to end users.
We take this a step further by using systemd socket activation. Instead of letting each proxy manage its own sockets, we let systemd create and own them. This decouples the lifetime of sockets from the lifetime of the Oxy application itself. If an Oxy process restarts or crashes, the sockets remain open and ready to accept new connections, which will be served as soon as the new process is running. That eliminates the “connection refused” errors that could happen during restarts in FL1 and improves overall availability during upgrades.
We also built our own coordination mechanisms in Rust to replace Go libraries like tableflip with shellflip. This uses a restart coordination socket that validates configuration, spawns new instances, and ensures the new version is healthy before the old one shuts down. This improves feedback loops and lets our automation tools detect and react to failures immediately, rather than relying on blind signal-based restarts.
Composing FL2 from Modules
To avoid the problems we had in FL1, we wanted a design where all interactions between product logic were explicit and easy to understand.
So, on top of the foundations provided by Oxy, we built a platform which separates all the logic built for our products into well-defined modules. After some experimentation and research, we designed a module system which enforces some strict rules:
No IO (input or output) can be performed by the module.
The module provides a list of phases.
Phases are evaluated in a strictly defined order, which is the same for every request.
Each phase defines a set of inputs which the platform provides to it, and a set of outputs which it may emit.
Here’s an example of what a module phase definition looks like:
This phase is for our custom error page product. It takes a few things as input — information about the IP of the visitor, some header and other HTTP information, and some “module values.” Module values allow one module to pass information to another, and they’re key to making the strict properties of the module system workable. For example, this module needs some information that is produced by the output of our rulesets-based custom errors product (the “MODULE_VALUE_RULESETS_CUSTOM_ERRORS_OUTPUT” input). These input and output definitions are enforced at compile time.
While these rules are strict, we’ve found that we can implement all our product logic within this framework. The benefit of doing so is that we can immediately tell which other products might affect each other.
How to replace a running system
Building a framework is one thing. Building all the product logic and getting it right, so that customers don’t notice anything other than a performance improvement, is another.
The FL code base supports 15 years of Cloudflare products, and it’s changing all the time. We couldn’t stop development. So, one of our first tasks was to find ways to make the migration easier and safer.
Step 1 – Rust modules in OpenResty
It’s a big enough distraction from shipping products to customers to rebuild product logic in Rust. Asking all our teams to maintain two versions of their product logic, and reimplement every change a second time until we finished our migration was too much.
So, we implemented a layer in our old NGINX and OpenResty based FL which allowed the new modules to be run. Instead of maintaining a parallel implementation, teams could implement their logic in Rust, and replace their old Lua logic with that, without waiting for the full replacement of the old system.
For example, here’s part of the implementation for the custom error page module phase defined earlier (we’ve cut out some of the more boring details, so this doesn’t quite compile as-written):
pub(crate) fn callback(_services: &mut Services, input: &Input<'_>) -> Output {
// Rulesets produced a response to serve - this can either come from a special
// Cloudflare worker for serving custom errors, or be directly embedded in the rule.
if let Some(rulesets_params) = input
.get_module_value(MODULE_VALUE_RULESETS_CUSTOM_ERRORS_OUTPUT)
.cloned()
{
// Select either the result from the special worker, or the parameters embedded
// in the rule.
let body = input
.get_module_value(MODULE_VALUE_CUSTOM_ERRORS_FETCH_WORKER_RESPONSE)
.and_then(|response| {
handle_custom_errors_fetch_response("rulesets", response.to_owned())
})
.or(rulesets_params.body);
// If we were able to load a body, serve it, otherwise let the next bit of logic
// handle the response
if let Some(body) = body {
let final_body = replace_custom_error_tokens(input, &body);
// Increment a metric recording number of custom error pages served
custom_pages::pages_served("rulesets").inc();
// Return a phase output with one final action, causing an HTTP response to be served.
return Output::from(TerminalAction::ServeResponse(ResponseAction::OriginError {
rulesets_params.status,
source: "rulesets http_custom_errors",
headers: rulesets_params.headers,
body: Some(Bytes::from(final_body)),
}));
}
}
}
The internal logic in each module is quite cleanly separated from the handling of data, with very clear and explicit error handling encouraged by the design of the Rust language.
Many of our most actively developed modules were handled this way, allowing the teams to maintain their change velocity during our migration.
Step 2 – Testing and automated rollouts
It’s essential to have a seriously powerful test framework to cover such a migration. We built a system, internally named Flamingo, which allows us to run thousands of full end-to-end test requests concurrently against our production and pre-production systems. The same tests run against FL1 and FL2, giving us confidence that we’re not changing behaviours.
Whenever we deploy a change, that change is rolled out gradually across many stages, with increasing amounts of traffic. Each stage is automatically evaluated, and only passes when the full set of tests have been successfully run against it – as well as overall performance and resource usage metrics being within acceptable bounds. This system is fully automated, and pauses or rolls back changes if the tests fail.
The benefit is that we’re able to build and ship new product features in FL2 within 48 hours – where it would have taken weeks in FL1. In fact, at least one of the announcements this week involved such a change!
Step 3 – Fallbacks
Over 100 engineers have worked on FL2, and we have over 130 modules. And we’re not quite done yet. We’re still putting the final touches on the system, to make sure it replicates all the behaviours of FL1.
So how do we send traffic to FL2 without it being able to handle everything? If FL2 receives a request, or a piece of configuration for a request, that it doesn’t know how to handle, it gives up and does what we’ve called a fallback – it passes the whole thing over to FL1. It does this at the network level – it just passes the bytes on to FL1.
As well as making it possible for us to send traffic to FL2 without it being fully complete, this has another massive benefit. When we have implemented a piece of new functionality in FL2, but want to double check that it is working the same as in FL1, we can evaluate the functionality in FL2, and then trigger a fallback. We are able to compare the behaviour of the two systems, allowing us to get a high confidence that our implementation was correct.
Step 4 – Rollout
We started running customer traffic through FL2 early in 2025, and have been progressively increasing the amount of traffic served throughout the year. Essentially, we’ve been watching two graphs: one with the proportion of traffic routed to FL2 going up, and another with the proportion of traffic failing to be served by FL2 and falling back to FL1 going down.
We started this process by passing traffic for our free customers through the system. We were able to prove that the system worked correctly, and drive the fallback rates down for our major modules. Our Cloudflare Community MVPs acted as an early warning system, smoke testing and flagging when they suspected the new platform might be the cause of a new reported problem. Crucially their support allowed our team to investigate quickly, apply targeted fixes, or confirm the move to FL2 was not to blame.
We then advanced to our paying customers, gradually increasing the amount of customers using the system. We also worked closely with some of our largest customers, who wanted the performance benefits of FL2, and onboarded them early in exchange for lots of feedback on the system.
Right now, most of our customers are using FL2. We still have a few features to complete, and are not quite ready to onboard everyone, but our target is to turn off FL1 within a few more months.
Impact of FL2
As we described at the start of this post, FL2 is substantially faster than FL1. The biggest reason for this is simply that FL2 performs less work. You might have noticed in the module definition example a line
filters: vec![],
Every module is able to provide a set of filters, which control whether they run or not. This means that we don’t run logic for every product for every request — we can very easily select just the required set of modules. The incremental cost for each new product we develop has gone away.
Another huge reason for better performance is that FL2 is a single codebase, implemented in a performance focussed language. In comparison, FL1 was based on NGINX (which is written in C), combined with LuaJIT (Lua, and C interface layers), and also contained plenty of Rust modules. In FL1, we spent a lot of time and memory converting data from the representation needed by one language, to the representation needed by another.
As a result, our internal measures show that FL2 uses less than half the CPU of FL1, and much less than half the memory. That’s a huge bonus — we can spend the CPU on delivering more and more features for our customers!
How do we measure if we are getting better?
Using our own tools and independent benchmarks like CDNPerf, we measured the impact of FL2 as we rolled it out across the network. The results are clear: websites are responding 10 ms faster at the median, a 25% performance boost.
Security
FL2 is also more secure by design than FL1. No software system is perfect, but the Rust language brings us huge benefits over LuaJIT. Rust has strong compile-time memory checks and a type system that avoids large classes of errors. Combine that with our rigid module system, and we can make most changes with high confidence.
Of course, no system is secure if used badly. It’s easy to write code in Rust, which causes memory corruption. To reduce risk, we maintain strong compile time linting and checking, together with strict coding standards, testing and review processes.
We have long followed a policy that any unexplained crash of our systems needs to be investigated as a high priority. We won’t be relaxing that policy, though the main cause of novel crashes in FL2 so far has been due to hardware failure. The massively reduced rates of such crashes will give us time to do a good job of such investigations.
What’s next?
We’re spending the rest of 2025 completing the migration from FL1 to FL2, and will turn off FL1 in early 2026. We’re already seeing the benefits in terms of customer performance and speed of development, and we’re looking forward to giving these to all our customers.
We have one last service to completely migrate. The “HTTP & TLS Termination” box from the diagram way back at the top is also an NGINX service, and we’re midway through a rewrite in Rust. We’re making good progress on this migration, and expect to complete it early next year.
After that, when everything is modular, in Rust and tested and scaled, we can really start to optimize! We’ll reorganize and simplify how the modules connect to each other, expand support for non-HTTP traffic like RPC and streams, and much more.
If you’re interested in being part of this journey, check out our careers page for open roles – we’re always looking for new talent to help us to help build a better Internet.
Five years ago, we announced that we were Eliminating Cold Starts with Cloudflare Workers. In that episode, we introduced a technique to pre-warm Workers during the TLS handshake of their first request. That technique takes advantage of the fact that the TLS Server Name Indication (SNI) is sent in the very first message of the TLS handshake. Armed with that SNI, we often have enough information to pre-warm the request’s target Worker.
Eliminating cold starts by pre-warming Workers during TLS handshakes was a huge step forward for us, but “eliminate” is a strong word. Back then, Workers were still relatively small, and had cold starts constrained by limits explained later in this post. We’ve relaxed those limits, and users routinely deploy complex applications on Workers, often replacing origin servers. Simultaneously, TLS handshakes haven’t gotten any slower. In fact, TLS 1.3 only requires a single round trip for a handshake – compared to three round trips for TLS 1.2 – and is more widely used than it was in 2021.
Earlier this month, we finished deploying a new technique intended to keep pushing the boundary on cold start reduction. The new technique (or old, depending on your perspective) uses a consistent hash ring to take advantage of our global network. We call this mechanism “Worker sharding”.
What’s in a cold start?
A Worker is the basic unit of compute in our serverless computing platform. It has a simple lifecycle. We instantiate it from source code (typically JavaScript), make it serve a bunch of requests (often HTTP, but not always), and eventually shut it down some time after it stops receiving traffic, to re-use its resources for other Workers. We call that shutdown process “eviction”.
The most expensive part of the Worker’s lifecycle is the initial instantiation and first request invocation. We call this part a “cold start”. Cold starts have several phases: fetching the script source code, compiling the source code, performing a top-level execution of the resulting JavaScript module, and finally, performing the initial invocation to serve the incoming HTTP request that triggered the whole sequence of events in the first place.
Cold starts have become longer than TLS handshakes
Fundamentally, our TLS handshake technique depends on the handshake lasting longer than the cold start. This is because the duration of the TLS handshake is time that the visitor must spend waiting, regardless, so it’s beneficial to everyone if we do as much work during that time as possible. If we can run the Worker’s cold start in the background while the handshake is still taking place, and if that cold start finishes before the handshake, then the request will ultimately see zero cold start delay. If, on the other hand, the cold start takes longer than the TLS handshake, then the request will see some part of the cold start delay – though the technique still helps reduce that visible delay.
In the early days, TLS handshakes lasting longer than Worker cold starts was a safe bet, and cold starts typically won the race. One of our early blog posts explaining how our platform works mentions 5 millisecond cold start times – and that was correct, at the time!
For every limit we have, our users have challenged us to relax them. Cold start times are no different.
There are two crucial limits which affect cold start time: Worker script size and the startup CPU time limit. While we didn’t make big announcements at the time, we have quietly raised both of those limits since our last Eliminating Cold Starts blog post:
Worker script size (compressed) increased from 1 MB to 5 MB, then again from 5 MB to 10 MB, for paying users.
Worker script size (compressed) increased from 1 MB to 3 MB for free users.
We relaxed these limits because our users wanted to deploy increasingly complex applications to our platform. And deploy they did! But the increases have a cost:
Increasing script size increases the amount of data we must transfer from script storage to the Workers runtime.
Increasing script size also increases the time complexity of the script compilation phase.
Increasing the startup CPU time limit increases the maximum top-level execution time.
Taken together, cold starts for complex applications began to lose the TLS handshake race.
Routing requests to an existing Worker
With relaxed script size and startup time limits, optimizing cold start time directly was a losing battle. Instead, we needed to figure out how to reduce the absolute number of cold starts, so that requests are simply less likely to incur one.
One option is to route requests to existing Worker instances, where before we might have chosen to start a new instance.
Previously, we weren’t particularly good at routing requests to existing Worker instances. We could trivially coalesce requests to a single Worker instance if they happened to land on a machine which already hosted a Worker, because in that case it’s not a distributed systems problem. But what if a Worker already existed in our data center on a different server, and some other server received a request for the Worker? We would always choose to cold start a new Worker on the machine which received the request, rather than forward the request to the machine with the already-existing Worker, even though forwarding the request would avoid the cold start.
To drive the point home: Imagine a visitor sends one request per minute to a data center with 300 servers, and that the traffic is load balanced evenly across all servers. On average, each server will receive one request every five hours. In particularly busy data centers, this span of time could be long enough that we need to evict the Worker to re-use its resources, resulting in a 100% cold start rate. That’s a terrible experience for the visitor.
Consequently, we found ourselves explaining to users, who saw high latency while prototyping their applications, that their latency would counterintuitively decrease once they put sufficient traffic on our network. This highlighted the inefficiency in our original, simple design.
If, instead, those requests were all coalesced onto one single server, we would notice multiple benefits. The Worker would receive one request per minute, which is short enough to virtually guarantee that it won’t be evicted. This would mean the visitor may experience a single cold start, and then have a 100% “warm request rate.” We would also use 99.7% (299 / 300) less memory serving this traffic. This makes room for other Workers, decreasing their eviction rate, and increasing their warm request rates, too – a virtuous cycle!
There’s a cost to coalescing requests to a single instance, though, right? After all, we’re adding latency to requests if we have to proxy them around the data center to a different server.
In practice, the added time-to-first-byte is less than one millisecond, and is the subject of continual optimization by our IPC and performance teams. One millisecond is far less than a typical cold start, meaning it’s always better, in every measurable way, to proxy a request to a warm Worker than it is to cold start a new one.
The consistent hash ring
A solution to this very problem lies at the heart of many of our products, including one of our oldest: the HTTP cache in our Content Delivery Network.
When a visitor requests a cacheable web asset through Cloudflare, the request gets routed through a pipeline of proxies. One of those proxies is a caching proxy, which stores the asset for later, so we can serve it to future requests without having to request it from the origin again.
A Worker cold start is analogous to an HTTP cache miss, in that a request to a warm Worker is like an HTTP cache hit.
When our standard HTTP proxy pipeline routes requests to the caching layer, it chooses a cache server based on the request’s cache key to optimize the HTTP cache hit rate. The cache key is the request’s URL, plus some other details. This technique is often called “sharding”. The servers are considered to be individual shards of a larger, logical system – in this case a data center’s HTTP cache. So, we can say things like, “Each data center contains one logical HTTP cache, and that cache is sharded across every server in the data center.”
Until recently, we could not make the same claim about the set of Workers in a data center. Instead, each server contained its own standalone set of Workers, and they could easily duplicate effort.
We borrow the cache’s trick to solve that. In fact, we even use the same type of data structure used by our HTTP cache to choose servers: a consistent hash ring. A naive sharding implementation might use a classic hash table mapping Worker script IDs to server addresses. That would work fine for a set of servers which never changes. But servers are actually ephemeral and have their own lifecycle. They can crash, get rebooted, taken out for maintenance, or decommissioned. New ones can come online. When these events occur, the size of the hash table would change, necessitating a re-hashing of the whole table. Every Worker’s home server would change, and all sharded Workers would be cold started again!
A consistent hash ring improves this scenario significantly. Instead of establishing a direct correspondence between script IDs and server addresses, we map them both to a number line whose end wraps around to its beginning, also known as a ring. To look up the home server of a Worker, first we hash its script, and then we find where it lies on the ring. Next, we take the server address which comes directly on or after that position on the ring, and consider that the Worker’s home.
If a new server appears for some reason, all the Workers that lie before it on the ring get re-homed, but none of the other Workers are disturbed. Similarly, if a server disappears, all the Workers which lay before it on the ring get re-homed.
We refer to the Worker’s home server as the “shard server”. In request flows involving sharding, there is also a “shard client”. It’s also a server! The shard client initially receives a request, and, using its consistent hash ring, looks up which shard server it should send the request to. I’ll be using these two terms – shard client and shard server – in the rest of this post.
Handling overload
The nature of HTTP assets lend themselves well to sharding. If they are cacheable, they are static, at least for their cache Time to Live (TTL) duration. So, serving them requires time and space complexity which scales linearly with their size.
But Workers aren’t JPEGs. They are live units of compute which can use up to five minutes of CPU time per request. Their time and space complexity do not necessarily scale with their input size, and can vastly outstrip the amount of computing power we must dedicate to serving even a huge file from cache.
This means that individual Workers can easily get overloaded when given sufficient traffic. So, no matter what we do, we need to keep in mind that we must be able to scale back up to infinity. We will never be able to guarantee that a data center has only one instance of a Worker, and we must always be able to horizontally scale at the drop of a hat to support burst traffic. Ideally this is all done without producing any errors.
This means that a shard server must have the ability to refuse requests to invoke Workers on it, and shard clients must always gracefully handle this scenario.
Two load shedding options
I am aware of two general solutions to shedding load gracefully, without serving errors.
In the first solution, the client asks politely if it may issue the request. It then sends the request if it receives a positive response. If it instead receives a “go away” response, it handles the request differently, like serving it locally. In HTTP, this pattern can be found in Expect: 100-continue semantics. The main downside is that this introduces one round-trip of latency to set the expectation of success before the request can be sent. (Note that a common naive solution is to just retry requests. This works for some kinds of requests, but is not a general solution, as requests may carry arbitrarily large bodies.)
The second general solution is to send the request without confirming that it can be handled by the server, then count on the server to forward the request elsewhere if it needs to. This could even be back to the client. This avoids the round-trip of latency that the first solution incurs, but there is a tradeoff: It puts the shard server in the request path, pumping bytes back to the client. Fortunately, we have a trick to minimize the amount of bytes we actually have to send back in this fashion, which I’ll describe in the next section.
Optimistically sending sharded requests
There are a couple of reasons why we chose to optimistically send sharded requests without waiting for permission.
The first reason of note is that we expect to see very few of these refused requests in practice. The reason is simple: If a shard client receives a refusal for a Worker, then it must cold start the Worker locally. As a consequence, it can serve all future requests locally without incurring another cold start. So, after a single refusal, the shard client won’t shard that Worker any more (until traffic for the Worker tapers off enough for an eviction, at least).
Generally, this means we expect that if a request gets sharded to a different server, the shard server will most likely accept the request for invocation. Since we expect success, it makes a lot more sense to optimistically send the entire request to the shard server than it does to incur a round-trip penalty to establish permission first.
The second reason is that we have a trick to avoid paying too high a cost for proxying the request back to the client, as I mentioned above.
We implement our cross-instance communication in the Workers runtime using Cap’n Proto RPC, whose distributed object model enables some incredible features, like JavaScript-native RPC. It is also the elder, spiritual sibling to the just-released Cap’n Web.
In the case of sharding, Cap’n Proto makes it very easy to implement an optimal request refusal mechanism. When the shard client assembles the sharded request, it includes a handle (called a capability in Cap’n Proto) to a lazily-loaded local instance of the Worker. This lazily-loaded instance has the same exact interface as any other Worker exposed over RPC. The difference is just that it’s lazy – it doesn’t get cold started until invoked. In the event the shard server decides it must refuse the request, it does not return a “go away” response, but instead returns the shard client’s own lazy capability!
The shard client’s application code only sees that it received a capability from the shard server. It doesn’t know where that capability is actually implemented. But the shard client’s RPC system does know where the capability lives! Specifically, it recognizes that the returned capability is actually a local capability – the same one that it passed to the shard server. Once it realizes this, it also realizes that any request bytes it continues to send to the shard server will just come looping back. So, it stops sending more request bytes, waits to receive back from the shard server all the bytes it already sent, and shortens the request path as soon as possible. This takes the shard server entirely out of the loop, preventing a “trombone effect.”
Workers invoking Workers
With load shedding behavior figured out, we thought the hard part was over.
But, of course, Workers may invoke other Workers. There are many ways this could occur, most obviously via Service Bindings. Less obviously, many of our favorite features, such as Workers KV, are actually cross-Worker invocations. But there is one product, in particular, that stands out for its powerful ability to invoke other Workers: Workers for Platforms.
Workers for Platforms allows you to run your own functions-as-a-service on Cloudflare infrastructure. To use the product, you deploy three special types of Workers:
A typical request flow for Workers for Platforms goes like so: First, we invoke the dynamic dispatch Worker. The dynamic dispatch Worker chooses and invokes a user Worker. Then, the user Worker invokes the outbound Worker to intercept its subrequests. The dynamic dispatch Worker chose the outbound Worker’s arguments prior to invoking the user Worker.
To really amp up the fun, the dynamic dispatch Worker could have a tail Worker attached to it. This tail Worker would need to be invoked with traces related to all the preceding invocations. Importantly, it should be invoked one single time with all events related to the request flow, not invoked multiple times for different fragments of the request flow.
You might further ask, can you nest Workers for Platforms? I don’t know the official answer, but I can tell you that the code paths do exist, and they do get exercised.
To support this nesting doll of Workers, we keep a context stack during invocations. This context includes things like ownership overrides, resource limit overrides, trust levels, tail Worker configurations, outbound Worker configurations, feature flags, and so on. This context stack was manageable-ish when everything was executed on a single thread. For sharding to be truly useful, though, we needed to be able to move this context stack around to other machines.
Our choice of Cap’n Proto RPC as our primary communications medium helped us make sense of it all. To shard Workers deep within a stack of invocations, we serialize the context stack into a Cap’n Proto data structure and send it to the shard server. The shard server deserializes it into native objects, and continues the execution where things left off.
As with load shedding, Cap’n Proto’s distributed object model provides us simple answers to otherwise difficult questions. Take the tail Worker question – how do we coalesce tracing data from invocations which got fanned out across any number of other servers back to one single place? Easy: create a capability (a live Cap’n Proto object) for a reportTraces() callback on the dynamic dispatch Worker’s home server, and put that in the serialized context stack. Now, that context stack can be passed around at will. That context stack will end up in multiple places: At a minimum, it will end up on the user Worker’s shard server and the outbound Worker’s shard server. It may also find its way to other shard servers if any of those Workers invoked service bindings! Each of those shard servers can call the reportTraces() callback, and be confident that the data will make its way back to the right place: the dynamic dispatch Worker’s home server. None of those shard servers need to actually know where that home server is. Phew!
Eviction rates down, warm request rates up
Features like this are always satisfying to roll out, because they produce graphs showing huge efficiency gains.
Once fully rolled out, only about 4% of total requests from enterprise traffic ended up being sharded. To put that another way, 96% of all enterprise requests are to Workers which are sufficiently loaded that we must run multiple instances of them in a data center.
Despite that low total rate of sharding, we reduced our global Worker eviction rate by 10x.
Our eviction rate is a measure of memory pressure within our system. You can think of it like garbage collection at a macro level, and it has the same implications. Fewer evictions means our system uses memory more efficiently. This has the happy consequence of using less CPU to clean up our memory. More relevant to Workers users, the increased efficiency means we can keep Workers in memory for an order of magnitude longer, improving their warm request rate and reducing their latency.
The high leverage shown – sharding just 4% of our traffic to improve memory efficiency by 10x – is a consequence of the power-law distribution of Internet traffic.
A power law distribution is a phenomenon which occurs across many fields of science, including linguistics, sociology, physics, and, of course, computer science. Events which follow power law distributions typically see a huge amount clustered in some small number of “buckets”, and the rest spread out across a large number of those “buckets”. Word frequency is a classic example: A small handful of words like “the”, “and”, and “it” occur in texts with extremely high frequency, while other words like “eviction” or “trombone” might occur only once or twice in a text.
In our case, the majority of Workers requests goes to a small handful of high-traffic Workers, while a very long tail goes to a huge number of low-traffic Workers. The 4% of requests which were sharded are all to low-traffic Workers, which are the ones that benefit the most from sharding.
So did we eliminate cold starts? Or will there be an Eliminating Cold Starts 3 in our future?
For enterprise traffic, our warm request rate increased from 99.9% to 99.99% – that’s three 9’s to four 9’s. Conversely, this means that the cold start rate went from 0.1% to 0.01% of requests, a 10x decrease. A moment’s thought, and you’ll realize that this is coherent with the eviction rate graph I shared above: A 10x decrease in the number of Workers we destroy over time must imply we’re creating 10x fewer to begin with.
Simultaneously, our warm request rate became less volatile throughout the course of the day.
Hmm.
I hate to admit this to you, but I still notice a little bit of space at the top of the graph. 😟
Artificial intelligence (AI) is central to Grab’s mission of delivering valuable, personalised experiences to millions of users across Southeast Asia. Achieving this requires a deep understanding of individual preferences, such as their favorite foods, relevant advertisements, spending habits, and more. This personalisation is driven by recommender models, which depend heavily on high-quality representations of the user.
Traditionally, these models have relied on hundreds to thousands of manually engineered features. Examples include the types of food ordered in the past week, the frequency of rides taken, or the average spending per transaction. However, these features were often highly specific to individual tasks, siloed within teams, and required substantial manual effort to create. Furthermore, they struggled to effectively capture time-series data, such as the sequence of user interactions with the app.
With advancements in learning from tabular and sequential data, Grab has developed a foundation model that addresses these limitations. By simultaneously learning from user interactions (clickstream data) and tabular data (e.g. transaction data), the model generates user embeddings that capture app behavior in a more holistic and generalised manner. These embeddings, represented as numerical values, serve as input features for downstream recommender models, enabling higher levels of personalisation and improved performance. Unlike manually engineered features, they generalise effectively across a wide range of tasks, including advertisement optimisation, dual app prediction, fraud detection, and churn probability, among others.
Figure 1. The process of building a foundation model involves three steps.
We build foundation models by first constructing a diverse training corpus encompassing user, merchant, and driver interactions. The pre-trained model can then be used in two ways. Based on Figure 1, in 2a we extract user embeddings from the model to serve downstream tasks to improve user understanding. The other path is 2b, where we fine-tune the model to make predictions directly.
Crafting a foundation model for Grab’s users
Grab’s journey towards building its own foundation model began with a clear recognition: existing models are not well-suited to our data. A general-purpose Large Language Model (LLM), for example, lacks the contextual understanding required to interpret why a specific geohash represents a bustling mall rather than a quiet residential area. Yet, this level of insight is precisely what we need for effective personalisation. This challenge extends beyond IDs, encompassing our entire ecosystem of text, numerical values, locations, and transactions.
Moreover, this rich data exists in two distinct forms: tabular data that captures a user’s long-term profile, and sequential time-series data that reflects their immediate intent. To truly understand our users, we needed a model capable of mastering both forms simultaneously. It became evident that off-the-shelf solutions would not suffice, prompting us to develop a custom foundation model tailored specifically to our users and their unique data.
The importance of data
Figure 2. We use tabular and time-series data to build user embeddings.
The success of foundation models hinges on the quality and diversity of the datasets used for training. Grab identified two essential sources of data for building user embeddings as shown in Figure 2. Tabular data provides general attributes and long-term behavior. Time-series data reflects how the user uses the app and captures the evolution of user preferences.
Tabular data: This classic data source provides general user attributes and insights into long-term behavior. For example, this includes attributes like a user’s age and saved locations, along with aggregated behavioral data such as their average monthly spending or most frequently used service.
Time-series clickstream data: Sequential data captures the dynamic nature of user decision-making and trends. Grab tracks every interaction on its app, including what users view, click, consider, and ultimately transact. Additionally, metrics like the duration between events reveal insights into user decisiveness. Time-series data provides a valuable perspective on evolving user preferences.
A successful user foundation model must be capable of integrating both tabular and time-series data. Adding to the complexity is the diversity of data modalities, including categorical/text, numerical, user IDs, images, and location data. Each modality carries unique information, often specific to Grab’s business, underscoring the need for a bespoke architecture.
This inherent diversity in data modalities distinguishes Grab from many other platforms. For example, a video recommendation platform primarily deals with a single modality: videos, supplemented by user interaction data such as watch history and ratings. Similarly, social media platforms are largely centred around posts, images, and videos. In contrast, Grab’s identity as a “superapp” generates a far broader spectrum of user actions and data types. As users navigate between ordering food, booking taxis, utilising courier services, and more, their interactions produce a rich and varied data trail that a successful model must be able to comprehend. Moreover, an effective foundation model for Grab must not only create embeddings for our users but also for our merchant-partners and driver-partners, each of whom brings their own distinctive sets of data modalities.
Examples of data modalities at Grab
To illustrate the breadth of data, consider these examples across different modalities:
Text: This includes user-provided information such as search queries within GrabFood or GrabMart (“chicken rice,” “fresh milk”) and reviews or ratings for drivers and restaurants. For merchants, this could encompass the restaurant’s name, menu descriptions, and promotional texts.
Numerical: This modality is rich with data points such as the price of a food order, the fare for a ride, the distance of a delivery, the waiting time for a driver, and the commission earned by a driver-partner. User behavior can also be quantified through numerical data, such as the frequency of app usage or average spending over a month.
Merchant/User/Driver ID: These categorical identifiers are central to the platform. A user_id tracks an individual’s activity across all of Grab’s services. A merchant_id represents a specific restaurant or store, linking to its menu, location, and order history. A driver_id corresponds to a driver-partner, associated with their vehicle type, service area, and performance metrics.
Location data: Geographic information is fundamental to Grab’s operations. This includes airport locations, malls, pickup and drop-off points for a ride ((lat_A, lon_A) to (lat_B, lon_B)), the delivery address for a food order, and the real-time location of drivers. This data helps in understanding user routines (e.g., commuting patterns) and logistical flows.
The challenges and opportunities of diverse modalities
The sheer variety of these data modalities presents several significant challenges and opportunities for building a unified user foundation model:
Data heterogeneity: The different data types—text, numbers, geographical coordinates, and categorical IDs do not naturally lend themselves to being combined. Each modality has its own unique structure and requires specialised processing techniques before it can be integrated into a single model.
Complex interactions as an opportunity: The relationships between different modalities are often intricate, revealing a user’s context and intent. A model that only sees one data type at a time will miss the full picture.
For example, consider a single user’s evening out. The journey begins when they book a ride (involving their user_id and a driver_id) to a specific drop-off point, such as a popular shopping mall (location data). Two hours later, from that same mall location, they open the app again and perform a search for “Japanese food” (text data). They then browse several restaurant profiles (merchant_ids) before placing an order, which includes a price (numerical data).
A traditional, siloed model would treat the ride and the food search as two independent events. However, the real opportunity lies in capturing the interactions within a single user’s journey. This is precisely what our unified foundation model is designed to achieve: to identify the connections and recognise that the drop-off location of a ride provides valuable context for a subsequent text search. A model that understands a location is not merely a coordinate, but a place that influences a user’s next action, can develop a far deeper understanding of user context. Unlocking this capability is the key to achieving superior performance in downstream tasks, such as personalisation.
Model architecture
Figure 3. Transformer architecture
Figure 3 displays Grab’s transformer architecture, enabling joint pre-training on tabular and time-series data with different modalities. Grab’s foundation model is built on a transformer architecture specifically designed to tackle four fundamental challenges inherent to Grab’s superapp ecosystem:
Jointly training on tabular and time-series data: A core requirement is to unify column order invariant tabular data (e.g. user attributes) with order-dependent time-series data (e.g. a sequence of user actions) within a single, coherent model.
Handling a wide variety of data modalities: The model must process and integrate diverse data types, including text, numerical values, categorical IDs, and geographic locations, each requiring its own specialised encoding techniques.
Generalising beyond a single task: The model must learn a universal representation from the entire ecosystem to power a wide array of downstream applications (e.g., recommendations, churn prediction, logistics) across all of Grab’s verticals.
Scaling to massive entity vocabularies: The architecture must efficiently handle predictions across vocabularies containing hundreds of millions of unique entities (users, merchants, drivers), a scale that makes standard classification techniques computationally prohibitive.
In the following section, we highlight how we tackled each challenge.
1. Unifying tabular and time-series data
Figure 4. Differences between tabular data and time-series data
A key architectural challenge lies in jointly training on both tabular and time-series data. Tabular data, which contains user attributes, is inherently order-agnostic — the sequence of columns does not matter. In contrast, time-series data is order-dependent, as the sequence of user actions is critical for understanding intent and behavior.
Traditional approaches often process these data types separately or attempt to force tabular data into a sequential format. However, this can result in suboptimal representations, as the model may incorrectly infer meaning from the arbitrary order of columns.
Our solution begins with a novel tokenisation strategy. We define a universal token structure as a key:value pair.
For tabular data, the key is the column name (e.g. online_hours) and the value is the user’s attribute (e.g. 4).
For time-series data, the key is the event type (e.g. view_merchant) and the value is the specific entity involved (e.g. merchant_id_114).
This key:value format creates a common language for all input data. To preserve the distinct nature of each data source, we employ custom positional embeddings and attention masks. These components instruct the model to treat key:value pairs from tabular data as an unordered set while treating tokens from time-series data as an ordered sequence. This allows the model to benefit from both data structures simultaneously within a single, coherent framework.
2. Handling diverse modalities with an adapter-based design
The second major challenge is the sheer variety of data modalities: user IDs, text, numerical values, locations, and more. To manage this diversity, our model uses a flexible adapter-based design. Each adapter acts as a specialised “expert” encoder for a specific modality, transforming its unique data format into a unified, high-dimensional vector space.
For modalities like text, adapters can be initialised with powerful pre-trained language models to leverage their existing knowledge.
For ID data like user/merchant/driver IDs, we initialise dedicated embedding layers.
For complex and specialised data like location coordinates or not-so-well-modeled modalities like numbers in existing LLMs, we design custom adapters.
After each token passes through its corresponding modality adapter, an additional alignment layer ensures that all the resulting vectors are projected into the same representation space. This step is critical for allowing the model to compare and combine insights from different data types, for example, to understand the relationship between a text search query (“chicken rice”) and a location pin (a specific hawker center). Finally, we feed the aligned vectors into the main transformer model.
This modular adapter approach is highly scalable and future-proof, enabling us to easily incorporate new modalities like images or audio and upgrade individual components as more advanced architectures become available.
3. Unsupervised pre-training for a complex ecosystem
A powerful model architecture is only half the story; the learning strategy determines the quality and generality of the knowledge captured in the final embeddings.
In the industry, recommender models are often trained using a semi-supervised approach. A model is trained on a specific, supervised objective, such as predicting the next movie a user will watch or whether they will click on an ad. After this training, the internal embeddings, which now carry information fine-tuned for that one task, can be extracted and used for related applications. This method is highly effective for platforms with a relatively homogeneous primary task, like video recommendation or social media platforms.
However, this single-task approach is fundamentally misaligned with the needs of a superapp. At Grab, we need to power a vast and diverse set of downstream use cases, including food recommendations, ad targeting, transport optimisation, fraud detection, and churn prediction. Training a model solely on one of these objectives would create biased embeddings, limiting their utility for all other tasks. Furthermore, focusing on a single vertical like Food would mean ignoring the rich signals from a user’s activity in Transport, GrabMart, and Financial Services, preventing the model from forming a truly holistic understanding.
Our goal is to capture the complex and diverse interactions between our users, merchants, and drivers across all verticals. To achieve this, we concluded that unsupervised pre-training is the most effective path forward. This approach allows us to leverage the full breadth of data available, learning a universal representation of the entire Grab ecosystem without being constrained to a single predictive task.
To pre-train our model on tabular and time-series data, we combine masked language modeling (reconstructing randomly masked tokens) with next action prediction. On a superapp like Grab, a user’s journey is inherently unpredictable. A user might finish a ride and immediately search for a place to eat, or transition from browsing groceries on GrabMart to sending a package with GrabExpress. The next action could belong to any of our diverse services like mobility, deliveries, or financial services.
This ambiguity means the model faces a complex challenge: it’s not enough to predict which item a user might choose; it must first predict the type of interaction they will even initiate. Therefore, to capture the full complexity of user intent, our model performs a dual prediction that directly mirrors our key:value token structure:
It predicts the type of the next action, such as click_restaurant, book_ride, or search_mart.
It predicts the value associated with that action, like the specific restaurant ID, the destination coordinates, or the text of the search query.
This dual-prediction task forces the model to learn the intricate patterns of user behavior, creating a powerful foundation that can be extended across our entire platform. To handle these predictions, where the output could be of any modality (an ID, a location, text, etc.), we employ modality-specific reconstruction heads. Each head is designed for a particular data type and uses a tailored loss function (e.g. cross-entropy for categorical IDs, mean squared error for numerical values) to accurately evaluate the model’s predictions.
4. The ID reconstruction challenge
A significant challenge is the sheer scale of our categorical ID vocabularies. The total number of unique merchants, users, and drivers on the Grab platform runs into the hundreds of millions. A standard cross-entropy loss function would require a final prediction layer with a massive output dimension. For instance, a vocabulary of 100 million IDs with a 768-dimension embedding would result in a prediction head of nearly 80 billion parameters, blowing up model parameter count.
To overcome this, we employ hierarchical classification. Instead of predicting from a single flat list of millions of IDs, we first classify IDs into smaller, meaningful groups based on their attributes (e.g. by city, cuisine type, etc). This is followed by a second-stage prediction within that much smaller subgroup. This technique dramatically reduces the computational complexity, making it feasible to learn meaningful representations for an enormous vocabulary of entities.
Extracting value from our foundation model
Figure 5. Our foundation model is pre-trained with tabular and time-series data.
Once our foundation model is pre-trained on the vast and diverse data within the Grab ecosystem, it becomes a powerful engine for driving business value. There are two primary pathways to harness its capabilities: fine-tuning and embedding extraction.
The first pathway involves fine-tuning the entire model on a labeled dataset for a specific downstream task, such as churn probability or fraud detection, to create a highly specialised and performant predictor.
The second, more flexible pathway is to use the model to generate powerful pre-trained embeddings. These embeddings serve as rich, general-purpose features that can support a wide range of separate downstream models. The remainder of this section will focus on this second pathway, exploring the types of embeddings we extract and how they empower our applications.
The dual-embedding strategy: Long-term and short-term memory
Our architecture is deliberately designed to produce two distinct but complementary types of user embeddings, providing a holistic view by capturing both the user’s stable, long-term identity and their dynamic, short-term intent.
The long-term representation: A stable identity profile
The long-term embedding captures a user’s persistent habits, established preferences, and overall persona. This representation is the learned vector for a given user_id, which is stored within the specialised User ID adapter. As the model trains on countless sequences from a user’s history, the adapter learns to distill their consistent behaviors into this single, stable vector. After training, we can directly extract this embedding, which effectively serves as the user’s “long-term memory” on the platform.
The short-term representation: A snapshot of recent intent
The short-term embedding is designed to capture a user’s immediate context and current mission. To generate this, a sequence of the user’s most recent interactions is processed through the model’s adapters and main transformer block. A Sequence Aggregation Module then condenses the transformer’s output into a single vector. This creates a snapshot of recent user intent, reflecting their most up-to-date activities and providing a fresh understanding of what they are trying to accomplish.
Scaling the foundation: From terabytes of data to millions of daily embeddings
Figure 6. Ray framework
Building a foundation model of this magnitude introduces monumental engineering challenges that extend beyond the model architecture itself. The practical success of our system hinges on our ability to solve two distinct scalability problems:
Massive-scale training: Pre-training our model involves processing terabytes of diverse, multimodal data. This requires a distributed computing framework that is not only powerful but also flexible enough to handle our unique data processing needs efficiently.
High-throughput inference: To keep our user understanding current, we must regenerate embeddings for millions of active users daily. This demands a highly efficient, scalable, and reliable batch processing system.
To meet these challenges, we built upon the Ray framework, an open-source standard for scalable computing. This choice allows us to manage both training and inference within a unified ecosystem, tailored to our specific needs.
Core principle: A unified architecture for heterogeneous workloads
As illustrated by the Ray framework, both our training and inference pipelines share a fundamental workflow: they begin with a complex Central Processing Unit (CPU) intensive data preprocessing stage (tokenisation), which is followed by a Graphics Processing Unit (GPU) intensive neural network computation.
A naive approach would bundle these tasks together, forcing expensive GPU resources to sit idle while the CPU handles data preparation. Our core architectural principle is to decouple these workloads. Using Ray’s native ability to manage heterogeneous hardware, we create distinct, independently scalable pools of CPU and GPU workers.
This allows for a highly efficient, assembly-line-style process. Data is first ingested by the CPU workers for parallelised tokenisation. The resulting tensors are then streamed directly to the GPU workers for model computation. This separation is the key to achieving near-optimal GPU utilisation, which dramatically reduces costs and accelerates processing times for both training and inference.
Distributed training
Applying this core principle, our training pipeline efficiently processes terabytes of raw data. The CPU workers handle the complex key:value tokenisation at scale, ensuring the GPU workers are consistently fed with training batches. This robust setup significantly reduces the end-to-end training time, enabling faster experimentation and iteration. We will go into more detail on our training framework in a future blog post.
Efficient and scalable daily inference
This same efficient architecture is mirrored for our daily inference task. To generate fresh embeddings for millions of users, we leverage Ray Data—an open-source library used for data processing in AI and Machine Learning (ML) workload, to execute a distributed batch inference pipeline. The process seamlessly orchestrates our CPU workers for tokenisation and our GPU workers for model application.
This batch-oriented approach is the key to our efficiency, allowing us to process thousands of users’ data simultaneously and maximise throughput. This robust and scalable inference setup ensures that our dozens of downstream systems are always equipped with fresh, high-quality embeddings, enabling the timely and personalised experiences our users expect.
Conclusion: A general foundation for intelligence across Grab
The development of our user foundation model marks a pivotal shift in how Grab leverages AI. It moves us beyond incremental improvements on task-specific models toward a general, unified intelligence layer designed to understand our entire ecosystem. While previous efforts at Grab have combined different data modalities, this model is the first to do so at a foundational level, creating a truly holistic and reusable understanding of our users, merchants, and drivers.
The generality of this model is its core strength. By pre-training on diverse and distinct data sources from across our platform—ranging from deep, vertical-specific interactions to broader behavioral signals—it is designed to capture rich, interconnected signals that task-specific models invariably miss. The potential of this approach is immense: a user’s choice of transport can become a powerful signal to inform food recommendations, and a merchant’s location can help predict ride demand.
This foundational approach fundamentally accelerates AI development across the organisation. Instead of starting from scratch, teams can now build new models on top of our high-quality, pre-trained embeddings, significantly reducing development time and improving performance. Existing models can be enhanced by incorporating these rich features, leading to better predictions and more personalised user experiences. Key areas such as ad optimisation, dual app prediction, fraud detection, and churn probability already heavily benefit from our foundation model, but this is just the beginning.
Our vision for the future
Our work on this foundation model is just the beginning. The ultimate goal is to deliver “embeddings as a product”. A stable, reliable, and powerful basis for any AI-driven application at Grab. While our initial embeddings for users, driver-partners, and merchant-partners have already proven their value, our vision extends to becoming the central provider for all fundamental entities within our ecosystem, including Locations, Bookings, Marketplace items, and more.
To realise this vision, we are focused on a path of continuous improvement across several key areas:
Unifying and enriching our datasets: Our current success comes from leveraging distinct, powerful data sources that capture different facets of the user journey. The next frontier is to unify these streams into a single, cohesive training corpus that holistically represents user activity across all of Grab’s services. This effort will create a comprehensive, low-noise view of user behavior, unlocking an even deeper level of insight.
Evolving the model architecture: We will continue to evolve the model itself, focusing on research to enhance its learning capabilities and predictive power to make the most of our increasingly rich data.
Improving scale and efficiency: As Grab grows, so must our systems. We are dedicated to further scaling our training and inference infrastructure to handle more data and complexity at an even greater efficiency.
By providing a continuously improving, general-purpose understanding of these core components, we are not just building a better model; we are building a more intelligent future for Grab. This enables us to innovate faster and deliver exceptional value to the millions who rely on our platform every day.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
As a serverless cloud provider, we run your code on our globally distributed infrastructure. Being able to run customer code on our network means that anyone can take advantage of our global presence and low latency. Workers isn’t just efficient though, we also make it simple for our users. In short: You write code. We handle the rest.
Part of ‘handling the rest’ is making Workers as secure as possible. We have previously written about our security architecture. Making Workers secure is an interesting problem because the whole point of Workers is that we are running third party code on our hardware. This is one of the hardest security problems there is: any attacker has the full power available of a programming language running on the victim’s system when they are crafting their attacks.
This is why we are constantly updating and improving the Workers Runtime to take advantage of the latest improvements in both hardware and software. This post shares some of the latest work we have been doing to keep Workers secure.
Some background first: Workers is built around the V8 JavaScript runtime, originally developed for Chromium-based browsers like Chrome. This gives us a head start, because V8 was forged in an adversarial environment, where it has always been under intense attack and scrutiny. Like Workers, Chromium is built to run adversarial code safely. That’s why V8 is constantly being tested against the best fuzzers and sanitizers, and over the years, it has been hardened with new technologies like Oilpan/cppgc and improved static analysis.
We use V8 in a slightly different way, though, so we will be describing in this post how we have been making some changes to V8 to improve security in our use case.
Hardware-assisted security improvements from Memory Protection Keys
Modern CPUs from Intel, AMD, and ARM have support for memory protection keys, sometimes called PKU, Protection Keys for Userspace. This is a great security feature which increases the power of virtual memory and memory protection.
Traditionally, the memory protection features of the CPU in your PC or phone were mainly used to protect the kernel and to protect different processes from each other. Within each process, all threads had access to the same memory. Memory protection keys allow us to prevent specific threads from accessing memory regions they shouldn’t have access to.
V8 already uses memory protection keys for the JIT compilers. The JIT compilers for a language like JavaScript generate optimized, specialized versions of your code as it runs. Typically, the compiler is running on its own thread, and needs to be able to write data to the code area in order to install its optimized code. However, the compiler thread doesn’t need to be able to run this code. The regular execution thread, on the other hand, needs to be able to run, but not modify, the optimized code. Memory protection keys offer a way to give each thread the permissions it needs, but no more. And the V8 team in the Chromium project certainly aren’t standing still. They describe some of their future plans for memory protection keys here.
In Workers, we have some different requirements than Chromium. The security architecture for Workers uses V8 isolates to separate different scripts that are running on our servers. (In addition, we have extra mitigations to harden the system against Spectre attacks). If V8 is working as intended, this should be enough, but we believe in defense in depth: multiple, overlapping layers of security controls.
That’s why we have deployed internal modifications to V8 to use memory protection keys to isolate the isolates from each other. There are up to 15 different keys available on a modern x64 CPU and a few are used for other purposes in V8, so we have about 12 to work with. We give each isolate a random key which is used to protect its V8 heap data, the memory area containing the JavaScript objects a script creates as it runs. This means security bugs that might previously have allowed an attacker to read data from a different isolate would now hit a hardware trap in 92% of cases. (Assuming 12 keys, 92% is about 11/12.)
The illustration shows an attacker attempting to read from a different isolate. Most of the time this is detected by the mismatched memory protection key, which kills their script and notifies us, so we can investigate and remediate. The red arrow represents the case where the attacker got lucky by hitting an isolate with the same memory protection key, represented by the isolates having the same colors.
However, we can further improve on a 92% protection rate. In the last part of this blog post we’ll explain how we can lift that to 100% for a particular common scenario. But first, let’s look at a software hardening feature in V8 that we are taking advantage of.
The V8 sandbox, a software-based security boundary
Over the past few years, V8 has been gaining another defense in depth feature: the V8 sandbox. (Not to be confused with the layer 2 sandbox which Workers have been using since the beginning.) The V8 sandbox has been a multi-year project that has been gaining maturity for a while. The sandbox project stems from the observation that many V8 security vulnerabilities start by corrupting objects in the V8 heap memory. Attackers then leverage this corruption to reach other parts of the process, giving them the opportunity to escalate and gain more access to the victim’s browser, or even the entire system.
V8’s sandbox project is an ambitious software security mitigation that aims to thwart that escalation: to make it impossible for the attacker to progress from a corruption on the V8 heap to a compromise of the rest of the process. This means, among other things, removing all pointers from the heap. But first, let’s explain in as simple terms as possible, what a memory corruption attack is.
Memory corruption attacks
A memory corruption attack tricks a program into misusing its own memory. Computer memory is just a store of integers, where each integer is stored in a location. The locations each have an address, which is also just a number. Programs interpret the data in these locations in different ways, such as text, pixels, or pointers. Pointers are addresses that identify a different memory location, so they act as a sort of arrow that points to some other piece of data.
Here’s a concrete example, which uses a buffer overflow. This is a form of attack that was historically common and relatively simple to understand: Imagine a program has a small buffer (like a 16-character text field) followed immediately by an 8-byte pointer to some ordinary data. An attacker might send the program a 24-character string, causing a “buffer overflow.” Because of a vulnerability in the program, the first 16 characters fill the intended buffer, but the remaining 8 characters spill over and overwrite the adjacent pointer.
See below for how such an attack would now be thwarted.
Now the pointer has been redirected to point at sensitive data of the attacker’s choosing, rather than the normal data it was originally meant to access. When the program tries to use what it believes is its normal pointer, it’s actually accessing sensitive data chosen by the attacker.
This type of attack works in steps: first create a small confusion (like the buffer overflow), then use that confusion to create bigger problems, eventually gaining access to data or capabilities the attacker shouldn’t have. The attacker can eventually use the misdirection to either steal information or plant malicious data that the program will treat as legitimate.
This was a somewhat abstract description of memory corruption attacks using a buffer overflow, one of the simpler techniques. For some much more detailed and recent examples, see this description from Google, or this breakdown of a V8 vulnerability.
Compressed pointers in V8
Many attacks are based on corrupting pointers, so ideally we would remove all pointers from the memory of the program. Since an object-oriented language’s heap is absolutely full of pointers, that would seem, on its face, to be a hopeless task, but it is enabled by an earlier development. Starting in 2020, V8 has offered the option of saving memory by using compressed pointers. This means that, on a 64-bit system, the heap uses only 32 bit offsets, relative to a base address. This limits the total heap to maximally 4 GiB, a limitation that is acceptable for a browser, and also fine for individual scripts running in a V8 isolate on Cloudflare Workers.
An artificial object with various fields, showing how the layout differs in a compressed vs. an uncompressed heap. The boxes are 64 bits wide.
If the whole of the heap is in a single 4 GiB area then the first 32 bits of all pointers will be the same, and we don’t need to store them in every pointer field in every object. In the diagram we can see that the object pointers all start with 0x12345678, which is therefore redundant and doesn’t need to be stored. This means that object pointer fields and integer fields can be reduced from 64 to 32 bits.
We still need 64 bit fields for some fields like double precision floats and for the sandbox offsets of buffers, which are typically used by the script for input and output data. See below for details.
Integers in an uncompressed heap are stored in the high 32 bits of a 64 bit field. In the compressed heap, the top 31 bits of a 32 bit field are used. In both cases the lowest bit is set to 0 to indicate integers (as opposed to pointers or offsets).
Conceptually, we have two methods for compressing and decompressing, using a base address that is divisible by 4 GiB:
// Decompress a 32 bit offset to a 64 bit pointer by adding a base address.
void* Decompress(uint32_t offset) { return base + offset; }
// Compress a 64 bit pointer to a 32 bit offset by discarding the high bits.
uint32_t Compress(void* pointer) { return (intptr_t)pointer & 0xffffffff; }
This pointer compression feature, originally primarily designed to save memory, can be used as the basis of a sandbox.
From compressed pointers to the sandbox
The biggest 32-bit unsigned integer is about 4 billion, so the Decompress() function cannot generate any pointer that is outside the range [base, base + 4 GiB]. You could say the pointers are trapped in this area, so it is sometimes called the pointer cage. V8 can reserve 4 GiB of virtual address space for the pointer cage so that only V8 objects appear in this range. By eliminating all pointers from this range, and following some other strict rules, V8 can contain any memory corruption by an attacker to this cage. Even if an attacker corrupts a 32 bit offset within the cage, it is still only a 32 bit offset and can only be used to create new pointers that are still trapped within the pointer cage.
The buffer overflow attack from earlier no longer works because only the attacker’s own data is available in the pointer cage.
To construct the sandbox, we take the 4 GiB pointer cage and add another 4 GiB for buffers and other data structures to make the 8 GiB sandbox. This is why the buffer offsets above are 33 bits, so they can reach buffers in the second half of the sandbox (40 bits in Chromium with larger sandboxes). V8 stores these buffer offsets in the high 33 bits and shifts down by 31 bits before use, in case an attacker corrupted the low bits.
Cloudflare Workers have made use of compressed pointers in V8 for a while, but for us to get the full power of the sandbox we had to make some changes. Until recently, all isolates in a process had to be one single sandbox if you were using the sandboxed configuration of V8. This would have limited the total size of all V8 heaps to be less than 4 GiB, far too little for our architecture, which relies on serving 1000s of scripts at once.
That’s why we commissioned Igalia to add isolate groups to V8. Each isolate group has its own sandbox and can have 1 or more isolates within it. Building on this change we have been able to start using the sandbox, eliminating a whole class of potential security issues in one stroke. Although we can place multiple isolates in the same sandbox, we are currently only putting a single isolate in each sandbox.
The layout of the sandbox. In the sandbox there can be more than one isolate, but all their heap pages must be in the pointer cage: the first 4 GiB of the sandbox. Instead of pointers between the objects, we use 32 bit offsets. The offsets for the buffers are 33 bits, so they can reach the whole sandbox, but not outside it.
Virtual memory isn’t infinite, there’s a lot going on in a Linux process
At this point, we were not quite done, though. Each sandbox reserves 8 GiB of space in the virtual memory map of the process, and it must be 4 GiB aligned for efficiency. It uses much less physical memory, but the sandbox mechanism requires this much virtual space for its security properties. This presents us with a problem, since a Linux process ‘only’ has 128 TiB of virtual address space in a 4-level page table (another 128 TiB are reserved for the kernel, not available to user space).
At Cloudflare, we want to run Workers as efficiently as possible to keep costs and prices down, and to offer a generous free tier. That means that on each machine we have so many isolates running (one per sandbox) that it becomes hard to place them all in a 128 TiB space.
Knowing this, we have to place the sandboxes carefully in memory. Unfortunately, the Linux syscall, mmap, does not allow us to specify the alignment of an allocation unless you can guess a free location to request. To get an 8 GiB area that is 4 GiB aligned, we have to ask for 12 GiB, then find the aligned 8 GiB area that must exist within that, and return the unused (hatched) edges to the OS:
If we allow the Linux kernel to place sandboxes randomly, we end up with a layout like this with gaps. Especially after running for a while, there can be both 8 GiB and 4 GiB gaps between sandboxes:
Sadly, because of our 12 GiB alignment trick, we can’t even make use of the 8 GiB gaps. If we ask the OS for 12 GiB, it will never give us a gap like the 8 GiB gap between the green and blue sandboxes above. In addition, there are a host of other things going on in the virtual address space of a Linux process: the malloc implementation may want to grab pages at particular addresses, the executable and libraries are mapped at a random location by ASLR, and V8 has allocations outside the sandbox.
The latest generation of x64 CPUs supports a much bigger address space, which solves both problems, and Linux kernels are able to make use of the extra bits with five level page tables. A process has to opt into this, which is done by a single mmap call suggesting an address outside the 47 bit area. The reason this needs an opt-in is that some programs can’t cope with such high addresses. Curiously, V8 is one of them.
This isn’t hard to fix in V8, but not all of our fleet has been upgraded yet to have the necessary hardware. So for now, we need a solution that works with the existing hardware. We have modified V8 to be able to grab huge memory areas and then use mprotect syscalls to create tightly packed 8 GiB spaces for sandboxes, bypassing the inflexible mmap API.
Putting it all together
Taking control of the sandbox placement like this actually gives us a security benefit, but first we need to describe a particular threat model.
We assume for the purposes of this threat model that an attacker has an arbitrary way to corrupt data within the sandbox. This is historically the first step in many V8 exploits. So much so that there is a special tier in Google’s V8 bug bounty program where you may assume you have this ability to corrupt memory, and they will pay out if you can leverage that to a more serious exploit.
However, we assume that the attacker does not have the ability to execute arbitrary machine code. If they did, they could disable memory protection keys. Having access to the in-sandbox memory only gives the attacker access to their own data. So the attacker must attempt to escalate, by corrupting data inside the sandbox to access data outside the sandbox.
You will recall that the compressed, sandboxed V8 heap only contains 32 bit offsets. Therefore, no corruption there can reach outside the pointer cage. But there are also arrays in the sandbox — vectors of data with a given size that can be accessed with an index. In our threat model, the attacker can modify the sizes recorded for those arrays and the indexes used to access elements in the arrays. That means an attacker could potentially turn an array in the sandbox into a tool for accessing memory incorrectly. For this reason, the V8 sandbox normally has guard regions around it: These are 32 GiB virtual address ranges that have no virtual-to-physical address mappings. This helps guard against the worst case scenario: Indexing an array where the elements are 8 bytes in size (e.g. an array of double precision floats) using a maximal 32 bit index. Such an access could reach a distance of up to 32 GiB outside the sandbox: 8 times the maximal 32 bit index of four billion.
We want such accesses to trigger an alarm, rather than letting an attacker access nearby memory. This happens automatically with guard regions, but we don’t have space for conventional 32 GiB guard regions around every sandbox.
Instead of using conventional guard regions, we can make use of memory protection keys. By carefully controlling which isolate group uses which key, we can ensure that no sandbox within 32 GiB has the same protection key. Essentially, the sandboxes are acting as each other’s guard regions, protected by memory protection keys. Now we only need a wasted 32 GiB guard region at the start and end of the huge packed sandbox areas.
With the new sandbox layout, we use strictly rotating memory protection keys. Because we are not using randomly chosen memory protection keys, for this threat model the 92% problem described above disappears. Any in-sandbox security issue is unable to reach a sandbox with the same memory protection key. In the diagram, we show that there is no memory within 32 GiB of a given sandbox that has the same memory protection key. Any attempt to access memory within 32 GiB of a sandbox will trigger an alarm, just like it would with unmapped guard regions.
The future
In a way, this whole blog post is about things our customers don’t need to do. They don’t need to upgrade their server software to get the latest patches, we do that for them. They don’t need to worry whether they are using the most secure or efficient configuration. So there’s no call to action here, except perhaps to sleep easy.
However, if you find work like this interesting, and especially if you have experience with the implementation of V8 or similar language runtimes, then you should consider coming to work for us. We are recruiting both in the US and in Europe. It’s a great place to work, and Cloudflare is going from strength to strength.
Grab operates as a dynamic ecosystem involving partners and various service providers, necessitating real-time intelligence and decision-making for seamless integration and service delivery. To facilitate this, GrabDeveloper serves as Grab’s centralized platform for developers and partners. It supports API integration, partner onboarding, and product management. It also provides tech support through staging and production portals with detailed documentation.
Working alongside Developer Home, Partner Gateway acts as Grab’s secure interface for exposing APIs to third-party entities. It enables seamless interactions between Grab’s hosted services and external consumers, such as mobile apps, web browsers, and partners. Partner Gateway enhances the experience by offering advanced metrics tracking through time-series charts and dashboards. Partner Gateway delivers actionable insights that ensure high performance, reliability, and user satisfaction in application integrations with Grab services.
Use cases
Let’s explore GrabDeveloper integration use cases with one of our partners, whom we’ll refer to as “Alpha.” Alpha is a company that specializes in producing and distributing a diverse range of perishable goods. To optimize their operations, time-series charts tracking API traffic request status codes and average API response times play a crucial role.
API traffic request service status codes chart
Time-series charts tracking API traffic request status codes offer valuable insights into the performance and reliability of APIs used for managing supply chain logistics, customer orders, and distribution networks. By monitoring these status codes, Alpha can promptly detect and resolve disruptions or failures in their digital systems, ensuring seamless operations and minimizing downtime.
Figure 1: API traffic chart from 5th Jan 2025 to 4th Mar 2025.
API average response times chart
Analyzing average response times helps the company maintain efficient communication between various systems, enhancing the speed and reliability of transactions and data exchanges. This proactive monitoring supports Alpha in delivering consistent, high-quality service to customers and partners, ultimately contributing to improved operational efficiency and customer satisfaction.
Analyzing average response times enables a company to ensure efficient communication across various systems, enhancing transaction speed and data exchange reliability. Proactive monitoring helps Alpha deliver consistent, high-quality service to customers and partners, boosting operational efficiency and customer satisfaction.
Figure 2: Average response time chart from 12 Mar 2025 3am to 12 Mar 2025 3pm (Endpoints are mocked for security purposes).
Endpoint status dashboard
For Alpha, the endpoint status dashboard delivers real-time insights into API performance, enabling swift issue resolution and seamless integration with the company’s systems. The dashboard enhances service reliability, supports business operations, and ensures uninterrupted data exchange, all of which are critical for Alpha’s business processes and customer satisfaction. Furthermore, the transparency and reliability provided by the dashboard strengthens trust in the partnership, ensuring Alpha to confidently rely on the integration to drive their digital initiatives and operational goals.
Figure 3: Endpoint status dashboard of express API for company Alpha. *Endpoints are mocked for security purposes.
Why choose Apache Pinot and what is it?
To accommodate these use cases, we need a backend storage system engineered for low-latency queries across a wide range of temporal intervals, spanning from one-hour snapshots to 30-day retrospective analyses, whereby it could contain up to ~6.8 billion rows of data in a 30 day period for a particular dataset. This led us to choose Apache Pinot for these use cases, a distributed Online Analytical Processing (OLAP) system designed for low-latency analytical queries on large-scale data with millisecond query latencies.
Apache Pinot is a real-time distributed OLAP datastore designed to deliver low-latency analytics on large-scale data. It is optimized for high-throughput ingestion and real-time query processing making it ideal for scenarios such as user-facing analytics, dashboards, and anomaly detection. Apache Pinot supports complex queries, including aggregations and filtering. It delivers sub-second response times by leveraging techniques like columnar storage, indexing, and data partitioning to achieve efficient query execution.
Data ingestion process
Figure 4: Data ingestion process.
API call initiation: An API call is made on the partner application and routed through the Partner Gateway.
Metric tracking: Dimensions such as client ID, partner ID, status code, endpoint, metric name, timestamp, and value (which is the metric) are tracked and uploaded to Datadog, a cloud-based monitoring platform.
Kafka message transformation: Within the partner gateway code, an Apache Kafka Producer converts these metrics into Kafka messages and stores them in a Kafka Topic. Grab utilizes Protobuf for serialization and deserialization of Kafka messages. Since Grab’s Golang Kafka ecosystem does not use the Confluent Schema Registry, Kafka messages must be serialized with a magic byte which indicates that they are using Confluent’s Schema Registry, followed by the Schema ID.
Serialization via Apache Flink: Serialization is managed using Apache Flink, an open-source stream processing framework. This ensures compatibility with the Confluent Schema Registry Protobuf Decoder plugin on Apache Pinot. The messages are then written to a separate Kafka Topic.
Ingestion to Apache Pinot: Messages from the Kafka Topic containing the magic byte are ingested directly into Pinot, which references the Confluent Schema Registry to accurately deserialize the messages.
Query execution: Queries on the Pinot table can be executed via the Pinot Rest Proxy API.
Data visualization: Users can view their project charts and dashboards on the GrabDeveloper Home UI, where data points are retrieved from queries executed in step 6.
Challenges faced
During the initial setup, we encountered significant performance challenges when executing aggregation queries on large datasets exceeding 150GB. Specifically, attempts to retrieve and process data for periods ranging from 20 to 30 days resulted in frequent timeout issues as the queries took longer than 10 seconds. This was particularly concerning as it compromised our ability to meet our Service Level Agreement (SLA) of delivering query results within 300 milliseconds. The existing query infrastructure struggled to efficiently manage the volume and complexity of data within the required timeframe, necessitating optimization efforts to improve performance and reliability.
Solution
Drawing from the insights gained on the limitations of our initial solutions, we implemented these strategic optimizations to significantly enhance our table’s performance.
Partitioning by metric name
Improved data locality: Partitioning the Kafka Topic by metric name ensures that related data is grouped together. When a query filters on a specific metric, Pinot can directly access the relevant partitions, minimizing the need to scan unrelated data. This significantly reduces I/O overhead and processing time.
Efficient query pruning: By physically partitioning data, only the servers holding the relevant partitions are queried. This leads to more efficient query pruning, as irrelevant data is excluded early in the process, further optimizing performance.
Enhanced parallel processing: Partitioning enables Pinot to distribute queries across multiple nodes, allowing different metrics to be processed in parallel. This leverages distributed computing resources, accelerating query execution and improving scalability for large datasets.
Column based on aggregation intervals
Table 1
Facilitates time-based aggregations: Rounded time columns (e.g., Timestamp_1h for hourly intervals) group data into coarser time buckets, enabling efficient aggregations such as hourly or daily metrics. This simplifies indexing and optimizes storage by precomputing aggregates for specific time intervals.
Efficient data filtering: Rounded time columns allow for precise filtering of data within specific aggregation intervals. For example, the query SELECT SUM(Value) FROM Table WHERE Timestamp_1h = '2025-01-20 01:00:00' can exclude irrelevant columns (e.g., column 2) and focus only on rows within the specified time interval, further enhancing query efficiency.
Utilizing the Star-tree index in Apache Pinot
The Star-tree Index in Apache Pinot is an advanced indexing structure that enhances query performance by pre-aggregating data across multiple dimensions (e.g., D1, D2). It features a hierarchical tree with a root node, leaf nodes (holding up to T records), and non-leaf nodes that split into child nodes when exceeding T records. Special star nodes store pre-aggregated records by omitting the splitting dimension. The tree is constructed based on a dimensionSplitOrder, dictating node splitting at each level.
dimensionsSplitOrder: This specifies the order in which dimensions are split at each level of the tree. The order is “Metric”, “Endpoint”, “Timestamp_1h”. This means the tree will first split by Metric, then by Endpoint, and finally by Timestamp_1h.
skipStarNodeCreationForDimensions: This array is empty, indicating that star nodes will be created for all dimensions specified in the split order. No dimensions are omitted from star node creation.
functionColumnPairs: This specifies the aggregation functions to be applied to columns when creating star nodes. The configuration includes “AVG__Value”, meaning the average of the “Value” column will be calculated and stored in star nodes.
maxLeafRecords: This is set to 1, indicating that each leaf node will contain only one record. If a node exceeds this number, it will split into child nodes.
Star-tree diagram
Figure 5: Star-tree Index Structure.
Components:
Root node (orange): This is the starting point for traversing the tree structure.
Leaf node (blue): These nodes contain up to a configurable number of records, denoted by T. In this configuration, maxLeafRecords is set to 1, meaning each leaf node will contain a maximum of one record.
Non-leaf node (green): These nodes will split into child nodes if they exceed the maxLeafRecords threshold. Since maxLeafRecords is set to 1, any node with more than one record will split.
Star-node (yellow): These nodes store pre-aggregated records by omitting the dimension used for splitting at that level. This helps in reducing the data size and improving query performance.
Example:
A practical explanation of the start-tree diagram would be to display the star-tree documents in a table format along with the sample queries used to retrieve the data.
Figure 6: Chart of query latency with and without optimization.
The graph above in Figure 6, provides a comparison analysis of query performance, showcasing the significant improvements achieved through the implemented optimization solutions. The query execution times are significantly reduced, as evidenced by the logarithmic scale values.
For the first query which calculates the latency for a particular aggregation interval, the log scale indicates a reduction from 4.64 to 2.32, translating to a decrease in query latency from 43,713 to 209 milliseconds.
Similarly, the second query, which aggregates the sum of the latency based on the tags for a particular metric, shows a log scale reduction from 3.71 to 1.54, with query latency improving from 5,072 to 35 milliseconds. These results underscore the efficacy of optimization in enhancing query performance, enabling faster data retrieval and processing
Tradeoffs
Star-tree indexes in Apache Pinot are designed to significantly enhance query performance by pre-computing aggregations. This approach allows for rapid query execution by utilizing pre-calculated results, rather than computing aggregations on-the-fly. However, this performance boost comes with a tradeoff in terms of storage space.
Before implementing the Star-tree index, the total storage size for 30 days of data was approximately 192GB. With the Star-tree index, this increased to 373GB, nearly doubling the storage requirements. Despite the increase in storage, the performance benefits substantially outweigh the costs associated with additional storage.
The cost impact is relatively minor. We utilize AWS gp3 EBS volumes, which roughly cost $14.48 USD monthly for the extra table (calculated as 0.08 USD x 181 GB). This cost is considered insignificant when compared to the substantial gains in query performance. Alternatively, precomputing the metrics via an ETL job is also feasible; however, it is less cost-effective due to the additional expenses required to maintain the pipeline.
The decision to use Star-tree indexes is justified by the dramatic improvement in query speed, which enhances user experience and efficiency. The modest increase in storage costs is a worthwhile investment for achieving optimal performance.
Conclusion
In conclusion, Grab’s integration of Apache Pinot as a backend solution within the Partner Gateway represents a forward-thinking strategy to meet the evolving demands of real-time analytics. Apache Pinot’s ability to deliver low-latency queries empowers our partners with immediate, actionable insights into API performance that enhances their integration experience and operational efficiency. This is crucial for partners who require rapid data access to make informed decisions and optimize their services.
The adoption of Star-tree indexing within Pinot further refines our analytics infrastructure by strategically balancing the trade-offs between query latency and storage costs. This optimization ensures Partner Gateway can support a diverse range of use cases with subsecond query latencies while maintaining high performance and reliability in service delivery reinforcing Grab’s commitment to delivering superior performance across its ecosystem.
Ultimately, the integration of Apache Pinot enhances Grab’s real-time analytics capabilities while empowering the company to drive innovation and consistently deliver exceptional service to both partners and users.
Credits to Manh Nguyen from the Coban Infrastructure Team, Michael Wengle from the Midas Team and Yuqi Wang from the DevHome team.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
At Grab, our engineering teams rely on a massive Go monorepo that serves as the backbone for a large portion of our backend services. This repository has been our development foundation for over a decade, but age brought complexity, and size brought sluggishness. What was once a source of unified code became a bottleneck that was slowing down our developers and straining our infrastructure.
A primer on GitLab, Gitaly, and replication
To understand our core problem, it’s helpful to know how GitLab handles repositories at scale. GitLab uses Gitaly, its Git RPC service, to manage all Git operations. In a high-availability setup like ours, we use a Gitaly Cluster with multiple nodes.
Here’s how it works:
Write operations: A primary Gitaly node handles all write operations.
Replication: Data is replicated to secondary nodes.
Read operations: Secondary nodes handle read operations, such as clones and fetches, effectively distributing the load across the cluster.
Failover: If the primary node fails, a secondary node can take over.
For the system to function effectively, replication must be nearly instantaneous. When secondary nodes experience significant delays syncing with the primary—a condition called replication lag—GitLab stops routing read requests to the secondary nodes to ensure data consistency. This forces all traffic back to the primary node, eliminating the benefits of our distributed setup. Figure 1 illustrates the replication architecture of Gitaly nodes.
Figure 1: The replication architecture of Gitaly nodes in a high-availability setup.
The scale of our problem
Our Go monorepo started as a simple repository 11 years ago but ballooned as Grab grew. A Git analysis using the git-sizer utility in early 2025 revealed the shocking scale:
12.7 million commits accumulated over a decade.
22.1 million Git trees consuming 73GB of metadata.
5.16 million blob objects totaling 176GB.
12 million references, mostly leftovers from automated processes.
429,000 commits deep on some branches.
444,000 files in the latest checkout.
This massive size wasn’t just a number—it was crippling our daily operations.
Infrastructure problems
Figure 2: Replication delays of up to four minutes during peak working hours.
In high-availability setups, replication is critical for distributing workloads and ensuring system reliability. However, when replication delays occur, they can severely impact infrastructure performance and create bottlenecks. Figure 2 illustrates replication delays of up to four minutes which caused both secondary nodes, Gitaly S1 (orange) and Gitaly S2 (blue), to lag behind the primary node, Gitaly P (green). As a result, all requests were routed exclusively to the primary node, creating significant performance challenges.
The key issues here are:
Single point of failure: Only one of our three Gitaly nodes could handle the load, creating a bottleneck.
Throttled throughput: The system limits the read capacity to just one-third of the cluster’s potential.
Developer experience issues
The growing size of the monorepo directly impacted developer workflows:
Slow clones: 8+ minutes even on fast networks.
Painful Git operations: Every commit, diff, and blame had to process millions of objects.
CI pipeline overhead: Repository cloning added up 5-8 minutes to every CI job.
Frustrated developers: “Why is this repo so slow?” became a common question.
Operational challenges
The repository’s scale introduced significant operational hurdles:
Storage issues: 250GB of Git data made backups and maintenance cumbersome.
GitLab UI timeouts: The web interface struggled to handle millions of commits and refs, frequently timing out.
Limited CI scalability: Adding more CI runners overloaded the single working node.
All these factors were dragging down developer productivity. It was clear that continuing to let the monorepo grow unchecked wasn’t sustainable. We needed to make the repository leaner and faster, without losing the important history that teams relied on.
Our solution journey
Proof of concept: Validating the theory
Before making any changes, we needed to answer a critical question: “Would trimming repository history solve our replication issues?” Without proof, committing to such a major change felt risky. So we set out to test the idea.
The test setup:
We designed a simple experiment. In our staging environment, we created two repositories:
Full history repository: This repository mirrored the original repository with full history.
Shallow history repository: This repository contained only a single commit history.
Both repositories contained the same number of files and directories. We then simulated production-like load on both of the repositories.
The results:
Full history repository: 160-240 seconds replication delay.
Shallow history repository: 1-2.5 seconds replication delay.
This was nearly a 100x improvement in replication performance.
This proof of concept gave us confidence that history trimming was the right approach and provided baseline performance expectations.
Content preservation strategies: What to keep
Initial strategy: Time-based approach (1-2 years)
Initially, we wanted to keep commits from the last 1-2 years and archive everything else, as this seemed like a reasonable balance between recent history and size reduction. However, when we developed our custom migration script, we discovered it could only process 100 commits per hour, approximately 2,400 commits per day. With millions of commits in the original repository, even keeping 1-2 years of history would take months.
We can only process ~100 commits per hour in batches of 20 to avoid memory limits on GitLab runners.
Each batch takes 2 minutes to process, but requires 10 minutes of cleanup (git gc, git reflog expire) to prevent local disk and memory exhaustion.
This means each batch takes 12 minutes, allowing only 5 batches per hour (60 ÷ 12 = 5), totaling to 100 commits per hour (5 × 20 = 100).
Larger batches increased cleanup time and skipping cleanup caused jobs to crash after 200-300 commits.
The bottleneck wasn’t just the number of commits, it was the 10-minute cleanup process.
Additional constraints discovered:
As we dug deeper, we discovered more obstacles.
Critical dependencies extended beyond two years. Some Go module tags from six years ago were still actively used.
A pure time-based cut would break existing build pipelines.
Development teams needed some recent history for troubleshooting and daily operations.
Revised strategy: Tag-based + recent history
Given the processing speed constraint of 100 commits per hour, we needed to drastically reduce the number of commits while preserving essential functionality. After careful evaluation, we settled on a tag-based approach combined with recent history.
What we decided to keep:
Critical tags: All commits reachable by 2,000+ identified tags, ensuring semantic importance for releases and dependencies.
Recent history: Complete commit history for the last month only addressing stakeholder needs within processing constraints.
Simplified merge commits: Converted complex merge commits into single commits to further reduce processing time.
Why this approach worked:
Time-feasible: Reduced processing time from months to weeks.
Functionally complete: Preserved all tagged releases and recent development context.
Stakeholder satisfaction: Met development teams’ need for recent history.
Massive size reduction: Achieved 99.9% fewer commits while keeping what matters.
The trade-off:
We sacrificed deep historical browsing of 1 to 2 years for practical migration feasibility, while ensuring no critical functionality was lost.
The approach: Use Git’s filter-repo tool with git replace --graft to remove commits older than a specified criteria.
Why it failed:
Complex history: Our repository’s highly non-linear history, with multiple branches and merges, made this approach impractical.
Workflow complexity: The process required numerous git replace --graft commands to account for various branches and dependencies, significantly complicating the workflow.
Risk of inconsistencies: The complexity introduced a high risk of errors and inconsistencies, making this method unsuitable.
History integrity: Resulted in linear sequence instead of preserving original merge structure.
Missing commits: Important merge commits were lost or incorrectly applied.
Method 4: Custom migration script (Success!)
The breakthrough: A sophisticated custom script that could handle our specific requirements and processing constraints. Unlike traditional Git history rewriting tools, our script implements a two-phase chronological processing approach that efficiently handles large-scale repositories.
Phase 1: Bulk migration
In this phase, the script focuses on reconstructing history based on critical tags.
Fetch tags chronologically: Retrieve all tags in the order they were created.
Pre-fetch Large File Storage (LFS) objects: Collect LFS objects for tag-related commits before processing.
Batch processing: Process tags in batches of 20 to optimize memory and network usage. For each tag:
Check for associated LFS objects.
Perform selective LFS fetch if required.
Create a new commit using the original tree hash and metadata.
Embed the original commit hash in the commit message for traceability.
Gracefully handle LFS checkout failures.
Then, push the processed batch of 20 commits to the destination repository, with LFS tolerance.
Cleanup and continue: Perform cleanup operations after each batch and proceed to the next.
Phase 2: Delta migration
This phase integrates recent commits after the cutoff date.
Fetch recent commits: Retrieve all commits created after the cutoff date in chronological order.
Batch processing: Process commits in batches of 20 for efficiency. For each commit:
Check for associated LFS objects.
Perform selective LFS fetch if required.
Recreate the commit with its original metadata.
Embed the original commit hash for resumption tracking in case of interruptions.
Gracefully handle LFS checkout failures.
Then, push the processed batch of commits to the destination repository, with LFS tolerance.
Tag mapping: Map tags to their corresponding new commit hashes.
Push tags: Push related tags pointing to the correct new commits.
Final validation: Validate all LFS objects to ensure completeness.
LFS handling
The script incorporates robust mechanisms to handle Git LFS efficiently.
Configure LFS for incomplete pushes.
Skip LFS download errors when possible.
Retry checkout with LFS smudge skip.
Perform selective LFS object fetching.
Gracefully degrade processing for missing LFS objects.
Key features:
Sequential processing of tags and commits in chronological order.
Resumable operations that could restart from the last processed item if interrupted.
Batch processing to manage memory and network resources efficiently.
Robust error handling for network issues and Git complications.
Maintains repository integrity while simplifying complex merge structures.
Optimized for our specific preservation strategy (tags + recent history).
Implementation: Executing the migration
With our strategy defined (tags + last month), we executed the migration using our custom script. This process involved careful planning, smart processing techniques, and overcoming technical challenges.
Smart processing approach
Our custom script employed several key strategies to ensure efficient and reliable migration:
Sequential tag processing: Replay tags chronologically to maintain logical history.
Resumable operations: The migration could restart from the last processed item if interrupted.
Batch processing: Handle items in manageable groups to prevent resource exhaustion.
Progress tracking: Monitor processing rate and estimated completion time.
Technical challenges solved
The migration addressed several critical technical hurdles.
Large file support: Handled Git LFS objects with incomplete push allowances.
Error handling: Robust retry logic for network issues and Git errors.
Merge commit simplification: Converted complex merge structures to linear commits.
Two-phase migration strategy
The migration was executed in two carefully planned phases.
Phase 1 – Bulk migration: Migrated 95% of tags while keeping the old repo live.
Phase 2 – Delta migration: Performed final synchronization during a maintenance window to migrate recent changes.
Results and impact
Infrastructure transformation
Replication delay, or the time required to sync across all Gitaly nodes, improved by 99.4% following the pruning process. As illustrated in Figures 3 and 4, the new pruned monorepo achieves replication in under ~1.5 seconds on average, compared to ~240 seconds for the old repository. This transformation eliminated the previous single-node bottleneck, enabling read requests to be distributed evenly across all three storage nodes, significantly enhancing system reliability and performance.
Figure 3: In the new pruned monorepo, replication delay ranges from 200 – 2,000 ms.
Figure 4: In the old monorepo, replication delay ranged from 16,000 – 28,000 ms.
The migration significantly improved load distribution across Gitaly nodes. As shown in Figure 5, the new monorepo leverages all three Gitaly nodes to serve requests, effectively tripling read capacity. Additionally, the migration eliminated the single point of failure that existed in the old monorepo, ensuring greater reliability and scalability.
Figure 5: In the new monorepo, requests are evenly distributed across all three servers, demonstrating improved performance and replication across nodes.
Figure 6: In the old monorepo, requests were served only by a single server during working hours, creating a single point of failure.
Performance improvements
The migration resulted in significant improvements across multiple areas.
Clone time: Reduced from 7.9 minutes to 5.1 minutes, achieving a 36% improvement, making repository cloning faster and more efficient.
Commit count: Achieved a 99.9% reduction, trimming the repository from 13 million commits to just 15.8 thousand commits, drastically simplifying its structure.
References: Reduced by 99.9%, going from 12 million to 9.8 thousand refs, streamlining repository metadata.
Storage: Reduced by 59%, shrinking storage requirements from 214GB to 87GB, optimizing resource usage.
Developer experience
The migration also transformed the developer experience.
Faster Git operations: Commits, diffs, and history commands are noticeably snappier.
Responsive GitLab UI: Web interface no longer times out.
Scalable CI: The system can now safely run 3x more concurrent jobs.
The following table summarizes the key repository metrics, comparing the state of the repository before and after the migration:
Metric
Old Monorepo
New Monorepo
Reduction
Commits
~13,000,000
~15,800
−99.9% (histories squashed)
Git trees
~23,600,000
~2,080,000
−91% (pruned)
Git references
~12,200,000
9,860
−99.9% (cleaned)
Blob storage
214 GiB
86.8 GiB
−59% (smaller packs)
Files in checkout
~444,000
~444,000
~0% (no change)
Latest code size
~9.9 GiB
~8.4 GiB
~−15% (slightly leaner)
Key challenges and lessons learned
Such a large-scale migration wasn’t without its hiccups and lessons. Here are some challenges we faced and what we learned:
Git LFS woes
Initially, GitLab rejected some commits due to missing LFS objects, even old commits that we weren’t keeping. This happened because GitLab’s push hook expected the content of LFS pointers, even if the files weren’t required. To fix this, we had to allow incomplete pushes and skip LFS download errors. We also wrote logic to selectively fetch LFS objects for commits we were keeping. This ensured that any binary assets needed by tagged commits were present in the new repo. The takeaway is that LFS adds complexity to history rewrites – plan for it by adjusting Git LFS settings (e.g., lfs.allowincompletepush) and verifying important large files are carried over.
Pipeline token scoping
Right after the cutover, some CI pipelines failed to access resources. We discovered a GitLab CI/CD pipeline token issue – our new repo’s ID wasn’t in the allowed list for certain secure token scopes. We quickly updated the settings to include the new project, resolving the authorization error. If your CI jobs interact with other projects or use project-scoped tokens, remember to update those references when you migrate repositories.
Commit hash references broke
One of our internal tools was using commit SHA-1 hashes to track deployed versions. Since rewriting history means changing all commit hashes, the tool couldn’t find the expected commits. The solution was to map old hashes to new ones for the tagged releases, or better, to modify the tool to use tag names instead of raw hashes going forward. We learned to communicate early with teams that have any dependency on Git commit IDs or history assumptions. In our case, providing a mapping of old tag→new tag (which were mostly 1-to-1 except for the commit SHA) helped them adjust. In hindsight, using stable identifiers like semantic version tags, is much more robust than relying on commit hashes, which are ephemeral in a rewritten history.
Developer concerns: “Where’s my history?”
A few engineers were concerned when they noticed that the git log in the new repo only showed two years of history. From their perspective, useful historical context seemed gone. We addressed this by pointing them to the archived full-history repo. In fact, we kept the old repository read-only in our GitLab, so anyone can still search the old history if needed (just not in the main repo). Additionally, we received suggestions on making the archive easily accessible or even automate a way to query old commits on demand. From this we learned, if you prune history, ensure there’s a plan to access legacy information for those rare times it’s needed – whether that’s an archive repo, a Git bundle, or a read-only mirror.
Office network bottleneck
Interestingly, after the migration, a few developers in certain offices didn’t feel a huge speed improvement in clones. It turned out their corporate network/VPN was the limiting factor – cloning 8 GiB vs 10 GiB over a slow link is not a night and day difference. This highlighted that we should continue to work with the IT team on improving network performance. The repo is faster, but the environment matters too. We’re using this as an opportunity to improve our office VPN throughput so that the 36% clone improvement is realized by everyone, not just CI machines.
Automation and hardcoded IDs
We had a lot of automation around the monorepo (scripts, webhooks, integrations). Most of these referenced the project by name, which remained the same, so they were fine. However, a few used the project’s numeric ID in the GitLab API, which changed when we created a new repo. Those broke. We had to scan and update some configs to use the new project ID. Our learning here is to audit all external references such as CI configs, deploy scripts, and monitor jobs when migrating repositories. Ideally, use identifiable names instead of IDs, or ensure you’re prepared to update them during the cutover.
Adjusting to new boundaries
Some teams had to adjust their workflows after the prune. For instance, one team was in the habit of digging into 3 to 5 year old commit logs to debug issues. Post-migration, git log doesn’t go back that far in the main repo; they have to consult the archive for that. It’s a cultural shift to not have all history at your fingertips. We held a short information session to explain how to access the archived repo and emphasized the benefits (faster operations) that come with the lean history. After a while, teams embraced the new normal, appreciating the speed and rarely needing the older commits anyway.
In the end, we had zero data loss – all actual code and tags were preserved – and only some minor inconveniences that were resolved within a day or two. The challenges reinforced the importance of thorough testing (our staging dry-runs caught many issues) and cross-team communication when making such a change.
Impact and next steps
This migration transformed our development infrastructure from a bottleneck into a performance enabler. We eliminated the single point of failure, restored confidence in our Git operations, and created a foundation that can support our growing engineering team.
As the next step, we plan to generalize our pruning script to apply the same optimization techniques to other repositories, ensuring consistency and scalability across our infrastructure. Additionally, we will implement continuous performance monitoring to track repository health and proactively address any emerging issues. To prevent future repository bloat, we aim to establish clear best practices and guidelines, empowering teams to maintain efficiency while supporting the growth of our engineering operations.
Conclusion
What started as a performance crisis became one of our most successful infrastructure projects. By focusing on the right problems—infrastructure reliability and performance rather than just size—we achieved dramatic improvements that benefit every developer daily.
The key takeaway is that sometimes the biggest technical challenges require custom solutions, careful planning, and willingness to iterate until you find what works. Our 99% improvement in replication performance is just the beginning of what’s possible when you tackle infrastructure problems systematically.
This migration was completed by Grab Tech Infra DevTools team, involving months of analysis, custom tooling development, and careful production migration of critical infrastructure serving thousands of developers across multiple time zones.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
Today, we’re announcing some changes that will improve the security of accessing Git data over SSH.
What’s changing?
We’re adding a new post-quantum secure SSH key exchange algorithm, known alternately as sntrup761x25519-sha512 and [email protected], to our SSH endpoints for accessing Git data.
This only affects SSH access and doesn’t impact HTTPS access at all.
It also does not affect GitHub Enterprise Cloud with data residency in the United States region.
Why are we making these changes?
These changes will keep your data secure both now and far into the future by ensuring they are protected against future decryption attacks carried out on quantum computers.
When you make an SSH connection, a key exchange algorithm is used for both sides to agree on a secret. The secret is then used to generate encryption and integrity keys. While today’s key exchange algorithms are secure, new ones are being introduced that are secure against cryptanalytic attacks carried out by quantum computers.
We don’t know if it will ever be possible to produce a quantum computer powerful enough to break traditional key exchange algorithms. Nevertheless, an attacker could save encrypted sessions now and, if a suitable quantum computer is built in the future, decrypt them later. This is known as a “store now, decrypt later” attack.
To protect your traffic to GitHub when using SSH, we’re rolling out a hybrid post-quantum key exchange algorithm: sntrup761x25519-sha512 (also known by the older name [email protected]). This provides security against quantum computers by combining a new post-quantum-secure algorithm, Streamlined NTRU Prime, with the classical Elliptic Curve Diffie-Hellman algorithm using the X25519 curve. Even though these post-quantum algorithms are newer and thus have received less testing, combining them with the classical algorithm ensures that security won’t be weaker than what the classical algorithm provides.
These changes are rolling out to github.com and non-US resident GitHub Enterprise Cloud regions. Only FIPS-approved cryptography may be used within the US region, and this post-quantum algorithm isn’t approved by FIPS.
When are these changes effective?
We’ll enable the new algorithm on September 17, 2025 for GitHub.com and GitHub Enterprise Cloud with data residency (with the exception of the US region).
This will also be included in GitHub Enterprise Server 3.19.
How do I prepare?
This change only affects connections with a Git client over SSH. If your Git remotes start with https://, you won’t be impacted by this change.
For most uses, the new key exchange algorithm won’t result in any noticeable change. If your SSH client supports [email protected] or sntrup761x25519-sha512 (for example, OpenSSH 9.0 or newer), it will automatically choose the new algorithm by default if your client prefers it. No configuration change should be necessary unless you modified your client’s defaults.
If you use an older SSH client, your client should fall back to an older key exchange algorithm. That means you won’t experience the security benefits of using a post-quantum algorithm until you upgrade, but your SSH experience should continue to work as normal, since the SSH protocol automatically picks an algorithm that both sides support.
If you want to test whether your version of OpenSSH supports this algorithm, you can run the following command: ssh -Q kex. That lists all of the key exchange algorithms supported, so if you see sntrup761x25519-sha512 or [email protected], then it’s supported.
To check which key exchange algorithm OpenSSH uses when you connect to GitHub.com, run the following command on Linux, macOS, Git Bash, or other Unix-like environments:
For other implementations of SSH, please see the documentation for that implementation.
What’s next?
We’ll keep an eye on the latest developments in security. As the SSH libraries we use begin to support additional post-quantum algorithms, including ones that comply with FIPS, we’ll update you on our offerings.
At Grab, our journey towards a more robust and scalable data ecosystem has been a continuous evolution.
Considering the size of our data lake and complexity of our ecosystem, with businesses spanning across ride hailing, food delivery, and financial services, we have been long past the point where a single centrally managed data warehouse could serve all these data needs. Over its first decade, Grab experienced dramatic growth. Like most growing businesses, teams in Grab prioritised delivering new features to meet the demands of their users. This meant that the task of data maintenance had to take a back seat so that development and stabilisation works can be focused to keep up with the growth. However, to prepare Grab for the next 10 years, especially for a future where AI is likely to play an important role, our leadership understood the need for high quality data foundation and gave a mandate to our data teams to uplevel our entire enterprise data ecosystem.
Acknowledging the rising need for data-driven insights and the continuous expansion of our data repository, we initiated our data mesh journey, named the Signals Marketplace, in 2024.
However, this journey was far from simple. We encountered several critical challenges that required a significant transformation in our approach to data management. Some of the challenges encountered include:
High volume and variety of data being generated: Grab’s diverse operations created both opportunities and complexities. Effectively harnessing this wealth of information required a scalable, streamlined and accessible approach.
Gaps in data ownership: As our data landscape expanded, maintaining data quality and reliability became increasingly difficult without clear lines of ownership and accountability. This often led to ad-hoc discussions and delays in resolving data related issues. Since it was difficult to trust the reliability of an existing pipeline, teams were likely to create duplicate pipelines just so they have something they can control.
Unscalable reliance on central Data Engineering (DE) team: Our traditional reliance on a central DE team to curate and serve all data needs was becoming a bottleneck. This centralised model struggled to keep pace with the distributed nature of data creation and consumption across various product and engineering teams.
Lack of communication between data consumers and producers: Data producers are unaware of downstream dependencies of their data which led to several instances of critical pipelines breaking because of upstream changes.
No single source of truth: While we did have a central data warehouse, it still left a lot of data gaps across Grab’s many business lines. Teams would struggle to identify the correct data definitions and reliable sources of truth.
Varied sophistication of data practitioners: Different teams have different levels of expertise in regards to data. Some teams had dedicated data engineers, but many didn’t.
To address these challenges, we made a strategic decision to adopt a data mesh architecture. Data mesh is a decentralised approach to data management that treats data as a product, owned and served by domain specific teams. This paradigm shift empowers teams closest to the data to take responsibility for its quality, reliability, and accessibility.
Our primary goal in adopting a data mesh was to significantly increase the reusability and reliability of our data assets across the organisation. By fostering a culture of data ownership and providing the necessary tools and processes, we aimed to unlock the full potential of our data to drive innovation and better serve our users and partners.
Certification
A cornerstone of our data mesh implementation is the concept of data certification. We believe that clearly identifying high quality, trustworthy datasets is crucial for both data producers and consumers.
Why certification?
Certification offers significant benefits to both sides of the data ecosystem. Data producers can clearly define and communicate the expectations and guarantees associated with their certified data assets, like defining Service Level Agreements (SLAs) for engineering services. This includes aspects like schema, data quality, and freshness. For data consumers, certification provides the confidence to readily discover and utilise these assets. Knowing that they come with stronger reliability guarantees and clear documentation, data consumers can confidently “shop” for certified data products, reducing the need for extensive validation and ad-hoc inquiries.
Figure 1: Concept of data certification
To achieve widespread data certification, we focused on several key enablers:
Ownership: Establishing decentralised ownership and accountability is fundamental and non-trivial. We clearly identified teams which we call Data Domains, individuals responsible as Business Data Owners (BDOs), and Technical Data Owners (TDOs) for the upkeep, usability, documentation, and associated Scheduled Large Orders (SLOs) of each data product. This step was bootstrapped by leveraging the identification of the data asset creator’s team. However, if the creator had changed teams or left the company, the initial mapping of Domain <> Data Asset needs to be reviewed by the Domain Leads.
Data contract: We introduced data contracts as formal agreements between data producers and consumers. These contracts define the schema, SLA guarantees (including freshness, completeness, and retention policies), notice period for changes, and communication channels for a data product. Data certification helps set clear expectations and ensures reliability across data pipelines.
Data operational excellence
To further enhance accountability and ensure adherence to data contracts, we implemented automated Data Production Incidents (DPIs) for breached contracts. When data quality tests are done on data availability, timeliness, consistency, completeness, accuracy, validity, or other reliability guarantees fail, a DPI ticket is automatically created and assigned to the TDO. This system aims to standardise and drive accountability in investigating and fixing issues related to reliability guarantees within Data Contracts. The goal is for teams to acknowledge and fix the root cause of the DPIs.
Operationalisation and outcomes
To drive the adoption of data certification and the principles of data mesh across Grab, we focused on the following north star metric: percentage of queries hitting certified assets (%). This metric serves as a direct indicator of the reusability and trust in our certified data products. It also helps teams prioritise their certification efforts towards the most frequently used tables. It essentially pushes every data team in two synergistic directions:
To certify their most used datasets.
To query only certified datasets as much as possible.
Operationalisation
The successful operationalisation of our data mesh and certification efforts relied on several key factors listed below:
Executive buy-in: Strong leadership support was crucial in driving this organisational change and emphasising the importance of data as a product.
Organisation-wide push with clear measurable reporting: We implemented an organisation-wide initiative with clearly defined goals and measurable targets for data certification. Progress is tracked and reported to ensure accountability and drive momentum.
Dashboard to guide Grabbers target most used tables: Dashboards and tooling likely within Hubble, provided visibility into data usage patterns, guiding teams to prioritise the certification of their most popular and impactful datasets.
Outcomes
As a result of these efforts, we have observed significant positive outcomes:
75% of Grab queries hitting certified assets: We achieved a significant milestone with 75% of Grab’s data queries now targeting certified assets. This indicates a strong adoption of certified data products and a growing trust in their reliability.
Active deprecation of assets: The focus on data ownership and the push for certification has also led to increased visibility into our data landscape, allowing us to identify and actively deprecate redundant and duplicated data assets. Deprecated tables increases 400% year over year (YoY). This not only improves efficiency but also reduces the complexity and cost of maintaining our data infrastructure.
Accelerated innovation and cross-domain reusability: Prior to data mesh, every team often resorted to building their own data sources which leads to lower quality outcomes and slower turn around time. Today, internet of things datasets (IoT) like weather data collected by one team can now be reused by another team to optimise marketplace decisions — a practical step toward a more connected data ecosystem.
Beyond these individual instances, we observe a convergence across Grab towards most used datasets, with the number of P80 datasets (the top 80% of Grab’s most used data) reducing by over 58% since the start of the campaign.
What’s next
While we have made significant strides in our data mesh journey, we recognise that this is an ongoing evolution. This progress wouldn’t be as smooth sailing without the platforms we build for data management and observability. In our next article, we will be delving into the enhancements for crucial tooling and platforms like Genchi (in-house data quality observational tool) and Hubble (metadata management platform, built on DataHub and Grab proprietary technology), which underpin our data mesh vision and enable greater data reliability and reusability.
Massive credits to Grab’s leadership, Mohan Krishnan and Nikhil Dwarakanath, as well as Data owners on driving this Grab-wide effort to build strong data foundations in Grab. Grab’s data mesh would not have been possible without the commitment of all data owners to certify and curate their data products.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
In this post, we outline how we transformed the way we serve data for our machine learning (ML) models and why we chose Amazon Aurora Postgres as the storage layer for our new feature store. At Grab, we have always been at the forefront of leveraging technology to enhance our services and provide the best possible experience for our platform users. This journey has led us to transition from a traditional approach to a more sophisticated and efficient ML feature store.
Over the years, ML at Grab has progressed from being used for specific, tactical purposes to being utilised to create long-term business value. As the complexity of our systems and ML models increased, requiring richer amounts of data over time, our platforms faced new challenges in managing more complex features such as a large number of feature keys (high-cardinality) and high-dimensional data or vectors. This evolution necessitated a shift in our data processing and management strategy. We needed a system to store and manage these complex features efficiently. In November 2023, this brought us back to the drawing board to evolve from Amphawa, our initial feature store.
We landed on the concept of feature tables: a set of data lake tables for ML features that are automatically and atomically ingested into our serving layer. While this concept is not new to the industry, as other platforms like Databricks and Tecton have evolved towards it, our approach is focused on atomicity and reproducibility. The rationale is that ensuring consistency and reliability during the serving lifecycle has become more critical, which has made it more challenging to manage within the model serving layer itself.
From feature store to data serving
A feature store is a repository that stores, serves, and manages ML features. It provides a unified platform where data scientists can access and share features, reducing redundancy and ensuring consistency across different models.
Figure 1: The high-level architecture of our centralised feature platform.
Our feature data is a key-value dataset. The key identifies a specific entity, such as a consumer ID, which is a known value in the incoming request. A composite key is supported by concatenating two or more entity identifiers. For example, (key = consumer_id + restaurant_id). The value is a binary that encodes the feature value and its type. Whenever a new value for a given entity needs to be updated, we write a new key-value pair for that entity.
New functional requirements
As our users designed and deployed increasingly complex ML solutions, new essential functional requirements were requested by our users:
Ability to retrieve the features given in the composite keys (contextual retrieval): The ML models in an upstream service might need to fetch all matching entities to form complete contextual information in order to make the recommendation. We build that context inside our ML orchestration layer before calling the model. This was previously not possible due to the design of composite keys in our initial approach.
Ability to update not just one entity atomically, but all the entities in a collection (atomic updates): This requirement concerns reducing the complexity of operations, such as rolling out new models and switching between versions of feature data. In Amphawa, newly ingested data is visible to consumer systems immediately after it’s written. As changes to the data may be ingested over a long period of time, users are responsible for ensuring the models or services don’t break while the new and old data coexist during ingestion, especially during potentially breaking changes to data. This complexity translates into quite complex code, which is hard to refactor over time. With the new approach, all feature changes will only become visible through atomic updates once the entire operation finishes successfully. This eases users’ pain of maintaining compatibility across versions.
Isolation of reading and writing capacity: The noisy-neighbor effect is one of the significant issues in our centralised feature store. Different readers could compete for read capacity. For some storage systems, write traffic could consume I/O capacity and affect reading latency. While reading capacity can be adjusted by scaling the storage, the competition between reading and writing capacity is highly dependent on the choice of storage. Hence, from the beginning, one of the top requirements of our second-generation feature store design was isolating reads from writes.
Feature table
To meet the functional requirements, we landed on the concept of a “feature table,” where users define and manage the schema and data on a per-table basis. Feature consumers can customise their tables based on their needs. Working with a table format directly makes it easier for data scientists to work with complex tabular data that needs to be retrieved in different ways depending on the context of the request. Moreover, it’s more manageable for us, on the platform side, because it’s closer to the actual format in the storage layer.
Amphawa (feature-centric)
New design (feature-table centric)
A user defines individual features and their types. Grouping into the table is storage layer is implicit.
A user defines their tables with compatibility with data-lake tools such as Spark.
The only index is on the data key.
A user defines their own indexes for their tables, based on their access pattern.
Table 1: Comparison between Amphawa and the new feature table.
Our feature tables are not just a storage solution but a critical component of our ML infrastructure. They enable us to simplify our feature management, efficiently handle the model lifecycle, and enhance our ML models’ performance. This has allowed us to provide a better experience for our platform users and dramatically improve the quality of our ML models based on our A/B testing results.
The data serving’s ingestion workflow
We designed an ingestion framework to address the atomicity requirements from the ground up.
The data ingestion process in Amphawa was meticulously crafted to ensure efficiency and reduce the pressure on the key-value store. Conversely, our priority has shifted to atomicity (all or nothing) to serve our feature tables and simplify version compatibility.
Figure 2: Ingestion workflow.
Landing feature table in the data lake: Data scientists use SQL or Python on Spark to build ML pipelines that output data lake tables. These tables and metadata for version control are stored as Parquet objects in Amazon S3.
Register collection summary: A “collection summary” consists of a group of feature tables to be served and other related metadata regarding customised individual tables. In this step, our registry will validate the table’s schema and ensure the customisations are defined correctly.
Deploy collection summary: Data scientists send another request to our registry to deploy a collection summary.
Pre-ingestion validation: The schema is validated to ensure compatibility with the target online ML models. This process ensures consistency and compatibility across feature updates.
Ingestion: The ingestion mechanism is a classic reverse ETL where the data from S3 is loaded into our Aurora Postgres tables.
Post-ingestion warm-up: To avoid cold-start latency spikes, shadow reading duplicates a part of the ongoing reading queries to the new tables for a period before the final switch.
One of the core propositions of feature tables is to offer a simplified interface for writing. Compared to writing directly to a database or providing SDKs for different processing frameworks, we provide a single, common interface for writing, independent of the actual choice of database. This allows us to evolve or even integrate feature tables with other data stores without requiring our users to modify their pipelines. We can decide how the data is represented in the database at a specific isolation level while guaranteeing total transparency for writes and reducing the complexity of read operations.
However, if a producer has access to S3 and can write in a columnar format, they can always write feature tables. This also means they can access samples from the data lake and use other tools for data validation, as well as tools for data discovery.
Do take note that a feature table can only be used for data that can be represented in tabular format and requires a minimum of one index to be present in the data. In this initial phase, we support the following data types:
Leveraging AWS Aurora for Postgres to meet our non-functional requirements
In our quest to optimise our ML infrastructure, we strategically decided to use Amazon Web Services (AWS) Aurora for PostgreSQL to meet our non-functional requirements. Aurora’s unique features and capabilities, which aligned perfectly with our operational needs, drove this decision.
AWS Aurora is a fully managed relational database service that combines the speed and reliability of high-end commercial databases with the simplicity and cost-effectiveness of open-source databases. A key differentiator is Aurora’s distributed storage architecture.
Figure 3: AWS Aurora storage architecture.
Architecture breakdown
The cluster volume consists of copies of the data across three “Availability Zones” in a single AWS Region. Since each database instance in the cluster reads from the distributed storage, this allows for minimal replication lag and ease of scaling out read replicas to meet performance requirements as traffic patterns change.
The separation between readers and writers also allows us to scale each independently. This is a crucial feature as our traffic is predominantly read-heavy. Most of our data-writes occur once a day. Using a serverless instance class with the writer node being scaled down during idle time significantly reduces our overall operational costs.
The independent scaling of reader and writer nodes allows us to maintain high performance and availability of our feature store. During peak read times, we can scale out the reader nodes to handle the increased load, ensuring that our ML models have uninterrupted access to the features they need. Conversely, during periods of heavy data ingestion, we can scale up the writer nodes to ensure efficient data storage.
To facilitate the seamless scaling up and down of the writer node, Aurora also allows a cluster to have a mixture of Serverless and Provisioned nodes. The key difference between the two is that with Serverless, the Aurora service manages the capacity of a single node and adjusts accordingly as the load increases and decreases. In our context, we’re using Serverless for our writer node to quickly scale up when heavy data ingestion starts and scale down automatically once the ingestion is done. We then use Provisioned nodes for the reader nodes since read traffic is more consistent.
In addition to cost and performance benefits, AWS Aurora simplifies our database management tasks. As a fully managed service, Aurora takes care of time-consuming database administration tasks such as hardware provisioning, software patching, setup, configuration, or backups, allowing our team to focus on optimising our ML models.
Accessing the data through our SDK
With the goal of providing a high-performing and highly available data serving SDK design, we’ve moved on from the centralised API design of Amphawa to a decentralised access architecture in Data Serving. Each data serving deployment is a self-contained system with a cluster and feature catalogue stored within the cluster as additional metadata tables. This minimises dependency, which improves the availability of the system.
The data serving SDK is designed to be a thin wrapper around the database driver to optimise performance. The SDK contains only a set of utility functions that load user configuration from the Catwalk platform and a query builder to translate user queries to SQL. No additional data validation is performed in the query code path, as all validation is done during feature table generation and ingestion. Therefore, the database handles most of the heavy lifting.
Decentralised deployments: A strategic shift in our infrastructure
We also investigated the difference between centralised and decentralised deployments. We have been exploring these options in the context of our ML feature store, specifically with our Amphawa service and Catwalk orchestrators.
Our original feature store was deployed as a standalone service where different model-serving applications can connect to it. On the other hand, a decentralised deployment is integrated within a model-serving orchestrator, and a specific orchestrator is bound to a set of pods.
After extensive discussions and evaluations, we concluded that a decentralised deployment for data serving would better align with our operational needs and objectives. Below is the list of factors we compared that led us to this decision:
Version control: Centralised deployments simplify version control but risk accumulating technical debt due to backward compatibility requirements. Decentralised deployments, while needing robust tracking, offer more flexibility.
Deployment strategies: Decentralised deployments enabled seamless use of Blue-green and Rolling Deployment strategies. They allow multiple versions to coexist and easy rollbacks, reducing client mismatch issues.
Noisy neighbour problem: Centralised deployments struggle with the noisy neighbour issue, which requires complex rate limiting. Decentralised setups mitigate this problem by isolating services.
Caching efficiency: Centralised deployments often suffer low cache hits, whereas decentralised deployments improve caching efficiency by better fitting data into the cache.
Conclusion
In conclusion, leveraging AWS Aurora for Postgres has enabled us to create a robust, scalable, and cost-effective feature store that supports our complex ML infrastructure. This is a testament to our commitment to using cutting-edge technology to enhance our services and provide the best possible experience for our users. Our shift towards decentralised deployments represents our dedication to optimising our infrastructure to support our ML models effectively. By aligning our deployment strategy with our operational needs, we aim to enhance the performance of our services and provide the best possible experience for our users.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
The Cloudflare Business Intelligence team manages a petabyte-scale data lake and ingests thousands of tables every day from many different sources. These include internal databases such as Postgres and ClickHouse, as well as external SaaS applications such as Salesforce. These tasks are often complex and tables may have hundreds of millions or billions of rows of new data each day. They are also business-critical for product decisions, growth plannings, and internal monitoring. In total, about 141 billion rows are ingested every day.
As Cloudflare has grown, the data has become ever larger and more complex. Our existing Extract Load Transform (ELT) solution could no longer meet our technical and business requirements. After evaluating other common ELT solutions, we concluded that their performance generally did not surpass our current system, either.
It became clear that we needed to build our own framework to cope with our unique requirements — and so Jetflow was born.
What we achieved
Over 100x efficiency improvement in GB-s:
Our longest running job with 19 billion rows was taking 48 hours using 300 GB of memory, and now completes in 5.5 hours using 4 GB of memory
We estimate that ingestion of 50 TB from Postgres via Jetflow could cost under $100 based on rates published by commercial cloud providers
>10x performance improvement:
Our largest dataset was ingesting 60-80,000 rows per second, this is now 2-5 million rows per second per database connection.
In addition, these numbers scale well with multiple database connections for some databases.
Extensibility:
The modular design makes it easy to extend and test. Today Jetflow works with ClickHouse, Postgres, Kafka, many different SaaS APIs, Google BigQuery and many others. It has continued to work well and remain flexible with the addition of new use cases.
How did we do this?
Requirements
The first step to designing our new framework had to be a clear understanding of the problems we were aiming to solve, with clear requirements to stop us creating new ones.
Performant & efficient
We needed to be able to move more data in less time as some ingestion jobs were taking ~24 hours, and our data will only grow. The data should be ingested in a streaming fashion and use less memory and compute resources than our existing solution.
Backwards compatible
Given the daily ingestion of thousands of tables, the chosen solution needed to allow for the migration of individual tables as needed. Due to our usage of Spark downstream and Spark’s limitations in merging desperate Parquet schemas, the chosen solution had to offer the flexibility to generate the precise schemas needed for each case to match legacy.
We also required seamless integration with our custom metadata system, used for dependency checks and job status information.
Ease of use
We want a configuration file that can be version-controlled, without introducing bottlenecks on repositories with many concurrent changes.
To increase accessibility for different roles within the team, another requirement was no-code (or configuration as code) in the vast majority of cases. Users should not have to worry about availability or translation of data types between source and target systems, or writing new code for each new ingestion. The configuration needed should also be minimal — for example, data schema should be inferred from the source system and not need to be supplied by the user.
Customizable
Striking a balance with the no-code requirement above, although we want a low bar of entry we also want to have the option to tune and override options if desired, with a flexible and optional configuration layer. For example, writing Parquet files is often more expensive than reading from the database, so we want to be able to allocate more resources and concurrency as needed.
Additionally, we wanted to allow for control over where the work is executed, with the ability to spin up concurrent workers in different threads, different containers, or on different machines. The execution of workers and communication of data was abstracted away with an interface, and different implementations can be written and injected, controlled via the job configuration.
Testable
We wanted a solution capable of running locally in a containerized environment, which would allow us to write tests for every stage of the pipeline. With “black box” solutions, testing often means validating the output after making a change, which is a slow feedback loop, risks not testing all edge cases as there isn’t good visibility of all code paths internally, and makes debugging issues painful.
Designing a flexible framework
To build a truly flexible framework, we broke the pipeline down into distinct stages, and then create a config layer to define the composition of the pipeline from these stages, and any configuration overrides. Every pipeline configuration that makes sense logically should execute correctly, and users should not be able to create pipeline configs that do not work.
Pipeline configuration
This led us to a design where we created stages which were classified according to the meaningfully different categories of:
Consumers
Transformers
Loaders
The pipeline was constructed via a YAML file that required a consumer, zero or more transformers, and at least one loader. Consumers create a data stream (via reading from the source system), Transformers (e.g. data transformations, validations) take a data stream input and output a data stream conforming to the same API so that they can be chained, and Loaders have the same data streaming interface, but are the stages with persistent effects — i.e. stages where data is saved to an external system.
This modular design means that each stage is independently testable, with shared behaviour (such as error handling and concurrency) inherited from shared base stages, significantly decreasing development time for new use cases and increasing confidence in code correctness.
Data divisions
Next, we designed a breakdown for the data that would allow the pipeline to be idempotent both on whole pipeline re-run and also on internal retry of any data partition due to transient error. We decided on a design that let us parallelize processing, while maintaining meaningful data divisions that allowed the pipeline to perform cleanups of data where required for a retry.
RunInstance: the least granular division, corresponding to a business unit for a single run of the pipeline (e.g. one month/day/hour of data).
Partition: a division of the RunInstance that allows each row to be allocated to a partition in a way that is deterministic and self-evident from the row data without external state, and is therefore idempotent on retry. (e.g. an accountId range, a 10-minute interval)
Batch: a division of the partition data that is non-deterministic and used only to break the data down into smaller chunks for streaming/parallel processing for faster processing with fewer resources. (e.g. 10k rows, 50 MB)
The options that the user configures in the consumer stage YAML both construct the query that is used to retrieve the data from the source system, and also encode the semantic meaning of this data division in a system agnostic way, so that later stages understand what this data represents — e.g. this partition contains the data for all accounts IDs 0-500. This means that we can do targeted data cleanup and avoid, for example, duplicate data entries if a single data partition is retried due to error.
Framework implementation
Standard internal state for stage compatibility
Our most common use case is something like read from a database, convert to Parquet format, and then save to object storage, with each of these steps being a separate stage. As more use cases were onboarded to Jetflow, we had to make sure that if someone wrote a new stage it would be compatible with the other stages. We don’t want to create a situation where new code needs to be written for every output format and target system, or you end up with a custom pipeline for every different use case.
The way we have solved this problem is by having our stage extractor class only allow output data in a single format. This means as long as any downstream stages support this format as in the input and output format they would be compatible with the rest of the pipeline. This seems obvious in retrospect, but internally was a painful learning experience, as we originally created a custom type system and struggled with stage interoperability.
For this internal format, we chose to use Arrow, an in-memory columnar data format. The key benefits of this format for us are:
Arrow ecosystem: Many data projects now support Arrow as an output format. This means when we write extractor stages for new data sources, it is often trivial to produce Arrow output.
No serialisation overhead: This makes it easy to move Arrow data between machines and even programming languages with minimum overhead. Jetflow was designed from the start to have the flexibility to be able to run in a wide range of systems via a job controller interface, so this efficiency in data transmission means there’s minimal compromise on performance when creating distributed implementations.
Reserve memory in large fixed-size batches to avoid memory allocations: As Go is a garbage collected (GC) language and GC cycle times are affected mostly by the number of objects rather than the sizes of those objects, fewer heap objects reduces CPU time spent garbage collecting significantly, even if the total size is the same. As the number of objects to scan, and possibly collect, during a GC cycle increases with the number of allocations, if we have 8192 rows with 10 columns each, Arrow would only require us to do 10 allocations versus the 8192 allocations of most drivers that allocate on a row by row basis, meaning fewer objects and lower GC cycle times with Arrow.
Converting rows to columns
Another important performance optimization was reducing the number of conversion steps that happen when reading and processing data. Most data ingestion frameworks internally represent data as rows. In our case, we are mostly writing data in Parquet format, which is column based. When reading data from column-based sources (e.g. ClickHouse, where most drivers receive RowBinary format), converting into row-based memory representations for the specific language implementation is inefficient. This is then converted again from rows to columns to write Parquet files. These conversions result in a significant performance impact.
Jetflow instead reads data from column-based sources in columnar formats (e.g. for ClickHouse-native Block format) and then copies this data into Arrow column format. Parquet files are then written directly from Arrow columns. The simplification of this process improves performance.
Writing each pipelines stage
Case study: ClickHouse
When testing an initial version of Jetflow, we discoveredthat due to the architecture of ClickHouse, using additional connections would not be of any benefit, since ClickHouse was reading faster than we were receiving data. It should then be possible, with a more optimized database driver, to take better advantage of that single connection to read a much larger number of rows per second, without needing additional connections.
Initially, a custom database driver was written for ClickHouse, but we ended up switching to the excellent ch-go low level library, which directly reads Blocks from ClickHouse in a columnar format. This had a dramatic effect on performance in comparison to the standard Go driver. Combined with the framework optimisations above, we now ingest millions of rows per second with a single ClickHouse connection.
A valuable lesson learned is that as with any software, tradeoffs are often made for the sake of convenience or a common use case that may not match your own. Most database drivers tend not to be optimized for reading large batches of rows, and have high per-row overhead.
Case study: Postgres
For Postgres, we use the excellent jackc/pgx driver, but instead of using the database/sql Scan interface, we directly receive the raw bytes for each row and use the jackc/pgx internal scan functions for each Postgres OID (Object Identifier) type.
The database/sql Scan interface in Go uses reflection to understand the type passed to the function and then also uses reflection to set each field with the column value received from Postgres. In typical scenarios, this is fast enough and easy to use, but falls short for our use cases in terms of performance. The jackc/pgx driver reuses the row bytes produced each time the next Postgres row is requested, resulting in zero allocations per row. This allows us to write high-performance, low-allocation code within Jetflow. With this design, we are able to achieve nearly 600,000 rows per second per Postgres connection for most tables, with very low memory usage.
Conclusion
As of early July 2025, the team ingests 77 billion records per day via Jetflow. The remaining jobs are in the process of being migrated to Jetflow, which will bring the total daily ingestion to 141 billion records. The framework has allowed us to ingest tables in cases that would not otherwise have been possible, and provided significant cost savings due to ingestions running for less time and with fewer resources.
In the future, we plan to open source the project, and if you are interested in joining our team to help develop tools like this, then open roles can be found at https://www.cloudflare.com/careers/jobs/.
Picture this: It’s 2024, and Grab’s microservices ecosystem is thriving with over 1000 services running in different infrastructure. But behind the scenes, our service mesh setup is showing its age. We’re running Consul with a fallback mechanism called Catcher – a setup that has served us well but is starting to feel like wearing a winter coat in Singapore’s heat.
The challenges we faced were becoming increasingly apparent. A single Consul server issue could trigger a fleet-wide impact, affecting critical services like food delivery and ride-hailing. Our fallback solution, while necessary, added complexity and limited our ability to implement advanced features like circuit breaking and retry policies. As we expanded our presence across Southeast Asia, the need for robust multi-cluster support became more critical than ever. The existing setup struggled with modern requirements like advanced traffic management and fine-grained security controls, while the growing complexity of our microservices architecture demanded better traffic management capabilities.
The complexity of Grab’s infrastructure
Our infrastructure landscape is as diverse as the Southeast Asian markets we serve. We operate a complex hybrid environment encompassing services on traditional VMs and EKS clusters with diverse infrastructure provisioning and deployment approaches. This diversity isn’t merely about deployment models—it’s about meeting the unique needs of different business units and regulatory requirements across the region.
The complexity doesn’t stop there. We handle dual traffic protocols (HTTP and gRPC) across our entire service ecosystem. Our services communicate across cloud providers between AWS and GCP. Within AWS alone, we maintain multiple organizations to segregate different Grab entities, each operating in its own isolated network. This multi-cloud, multi-protocol, multi-organization setup presented unique challenges for our service mesh implementation.
The quest for a better solution
Like any good tech team, we didn’t just jump to conclusions. We embarked on a thorough evaluation of service mesh solutions, considering various options including Application Load Balancer (ALB), Istio, AWS Lattice, and Linkerd. Our evaluation process was comprehensive and focused on real-world needs, examining everything from stability under high load to the performance impact on service-to-service communication.
We needed a solution that could handle our distributed architecture while maintaining operational simplicity. The ideal service mesh would need to integrate seamlessly with our existing infrastructure landscape while offering the flexibility to scale with our growing needs. After careful consideration, Istio emerged as the clear winner, offering robust multi-cluster support with flexible deployment models and a comprehensive set of features for traffic management, security, and observability.
What really sealed the deal was Istio’s strong Kubernetes integration and native support, combined with active community backing. The rich ecosystem of tools and integrations meant we wouldn’t be building everything from scratch, while the flexible deployment options could accommodate our unique requirements.
Designing our Istio architecture
When it came to designing our Istio implementation, we took a slightly unconventional approach. Instead of following the traditional “one control plane per cluster” pattern, we designed a more resilient architecture that would better suit our needs. We implemented multiple control planes running on dedicated Kubernetes clusters for better isolation and scalability, with active-active pairs ensuring high availability.
Figure 1. External control planes and Kubernetes API servers – Endpoints discovery
Figure 2. Istio proxy to Istio control plane – xDS flow
Our architecture needed to support high-throughput service-to-service communication while enabling complex routing rules for A/B testing and canary deployments. We implemented custom resource definitions for service mesh configuration and integrated with our existing monitoring and alerting systems. The organization-based mesh boundaries we designed would support our multi-tenant architecture, while our solution for cross-cluster endpoint discovery would ensure reliable service communication across our distributed system.
This design wasn’t just about following best practices – it was about learning from our past experiences with etcd and Consul. We wanted a setup that could handle Grab’s scale while maintaining simplicity and reliability. The architecture needed to support everything from high-throughput service-to-service communication to complex routing rules for A/B testing and canary deployments, all while maintaining fine-grained security policies and comprehensive observability.
The migration journey begins
In Q4 2024, we kicked off our migration journey with a clear plan. While our initial strategy focused on gRPC traffic migration, real-world priorities led us down a different path. Our first major milestone was the GCP to AWS migration, a cross-cloud initiative that would test our service mesh capabilities in a complex, multi-cloud environment.
This cross-cloud migration was a significant undertaking, requiring careful coordination between teams and careful consideration of network policies, security requirements, and service dependencies. We had to ensure seamless communication between services running in different cloud providers while maintaining security and performance standards.
Alongside our ongoing cloud migration efforts, we launched parallel initiatives focused on gRPC and HTTP traffic migration with cross-mesh connectivity requirements. This phase introduced distinct challenges, as it involved migrating business-critical services while implementing gradual traffic shifting capabilities and quick rollback mechanisms to ensure zero-downtime migrations. We also maintained close monitoring of performance metrics throughout the process.
Additionally, we needed to ensure seamless compatibility between different service mesh implementations and navigate the complexities of cross-mesh communication. The insights and experience gained from our cloud migration phase have proven invaluable in informing our approach and execution strategy for this critical migration effort.
The journey hasn’t been without its challenges. We’ve had to balance migration speed with stability while coordinating across multiple teams and organizations. Handling both gRPC and HTTP traffic patterns required careful planning and execution. We’ve had to deal with legacy systems and technical debt while training and supporting teams through the transition. Maintaining service continuity during these transitions has been our top priority.
Lessons learned
This journey has taught us several valuable lessons. We’ve learned that sometimes the standard approach isn’t the best fit, and innovation often comes from questioning assumptions. We’ve discovered the importance of balancing innovation with stability, taking calculated risks while building capability for a quick mitigation.
Keeping the bigger picture in mind has been crucial, considering long-term implications and planning for scale and growth. We’ve learned to document challenges and solutions, sharing knowledge across teams to avoid repeating mistakes. Most importantly, we’ve learned to stay flexible and adapt to changing needs, being ready to pivot when necessary while keeping an eye on emerging technologies.
What’s next?
The service mesh landscape is constantly evolving, and we’re excited to be part of this journey. Our next steps include continuing our migration efforts with a focus on stability while exploring mesh features like advanced traffic management, and enhanced security policies.
We’re also working on enhancing our operational capabilities through automated testing and validation, improved monitoring and alerting, and better debugging tools. As we progress, we’re committed to sharing our experiences with the community through open source contributions, conference participation, and technical blogs.
Shape the future with us
We’re not just implementing a service mesh—we’re architecting the backbone of Grab’s microservices future. Every decision prioritizes reliability, scalability, and maintainability, ensuring we build something that will stand the test of time.
The journey continues, and we’re excited about what lies ahead. Follow our progress for real-world insights that might shape your own service mesh evolution.
Want to help us build the future? We have exciting opportunities waiting for you.
Credits to the Service Mesh team: Aashif Bari, Hilman Kurniawan, Hofid Mashudi, Jingshan Pang, Kaitong Guo, Mikko Turpeinen, Sok Ann Yap, Jesse Nguyen, and Xing Yii.
Join us
Grab is a leading superapp in Southeast Asia, operating across the deliveries, mobility and digital financial services sectors. Serving over 800 cities in eight Southeast Asian countries, Grab enables millions of people everyday to order food or groceries, send packages, hail a ride or taxi, pay for online purchases or access services such as lending and insurance, all through a single app. Grab was founded in 2012 with the mission to drive Southeast Asia forward by creating economic empowerment for everyone. Grab strives to serve a triple bottom line – we aim to simultaneously deliver financial performance for our shareholders and have a positive social impact, which includes economic empowerment for millions of people in the region, while mitigating our environmental footprint.
Powered by technology and driven by heart, our mission is to drive Southeast Asia forward by creating economic empowerment for everyone. If this mission speaks to you, join our team today!
The collective thoughts of the interwebz
Manage Consent
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.