Post Syndicated from Home Assistant original https://www.youtube.com/watch?v=HV4D-Fx-mlU
Fitting Everything Together
Post Syndicated from original https://0pointer.net/blog/fitting-everything-together.html
TLDR: Hermetic /usr/ is awesome; let’s popularize image-based OSes
with modernized security properties built around immutability,
SecureBoot, TPM2, adaptability, auto-updating, factory reset,
uniformity – built from traditional distribution packages, but
deployed via images.
Over the past years, systemd gained a number of components for
building Linux-based operating systems. While these components
individually have been adopted by many distributions and products for
specific purposes, we did not publicly communicate a broader vision
of how they should all fit together in the long run. In this blog story I
hope to provide that from my personal perspective, i.e. explain how I
personally would build an OS and where I personally think OS
development with Linux should go.
I figure this is going to be a longer blog story, but I hope it
will be equally enlightening. Please understand though that everything
I write about OS design here is my personal opinion, and not one of my
employer.
For the last 12 years or so I have been working on Linux OS
development, mostly around systemd. In all those years I had a lot
of time thinking about the Linux platform, and specifically
traditional Linux distributions and their strengths and weaknesses. I
have seen many attempts to reinvent Linux distributions in one way or
another, to varying success. After all this most would probably
agree that the traditional RPM or dpkg/apt-based distributions still
define the Linux platform more than others (for 25+ years now), even
though some Linux-based OSes (Android, ChromeOS) probably outnumber
the installations overall.
And over all those 12 years I kept wondering, how would I actually
build an OS for a system or for an appliance, and what are the
components necessary to achieve that. And most importantly, how can we
make these components generic enough so that they are useful in
generic/traditional distributions too, and in other use cases than my
own.
The Project
Before figuring out how I would build an OS it’s probably good to
figure out what type of OS I actually want to build, what purpose I
intend to cover. I think a desktop OS is probably the most
interesting. Why is that? Well, first of all, I use one of these for my
job every single day, so I care immediately, it’s my primary tool of
work. But more importantly: I think building a desktop OS is one of
the most complex overall OS projects you can work on, simply because
desktops are so much more versatile and variable than servers or
embedded devices. If one figures out the desktop case, I think there’s
a lot more to learn from, and reuse in the server or embedded case,
then going the other way. After all, there’s a reason why so much of the
widely accepted Linux userspace stack comes from people with a desktop
background (including systemd, BTW).
So, let’s see how I would build a desktop OS. If you press me hard,
and ask me why I would do that given that ChromeOS already exists and
more or less is a Linux desktop OS: there’s plenty I am missing in
ChromeOS, but most importantly, I am lot more interested in building
something people can easily and naturally rebuild and hack on,
i.e. Google-style over-the-wall open source with its skewed power
dynamic is not particularly attractive to me. I much prefer building
this within the framework of a proper open source community, out in
the open, and basing all this strongly on the status quo ante,
i.e. the existing distributions. I think it is crucial to provide a
clear avenue to build a modern OS based on the existing distribution
model, if there shall ever be a chance to make this interesting for a
larger audience.
(Let me underline though: even though I am going to focus on a desktop
here, most of this is directly relevant for servers as well, in
particular container host OSes and suchlike, or embedded devices,
e.g. car IVI systems and so on.)
Design Goals
-
First and foremost, I think the focus must be on an image-based
design rather than a package-based one. For robustness and security
it is essential to operate with reproducible, immutable images that
describe the OS or large parts of it in full, rather than operating
always with fine-grained RPM/dpkg style packages. That’s not to say
that packages are not relevant (I actually think they matter a
lot!), but I think they should be less of a tool for deploying code
but more one of building the objects to deploy. A different way to
see this: any OS built like this must be easy to replicate in a
large number of instances, with minimal variability. Regardless if
we talk about desktops, servers or embedded devices: focus for my
OS should be on “cattle”, not “pets”, i.e that from the start it’s
trivial to reuse the well-tested, cryptographically signed
combination of software over a large set of devices the same way,
with a maximum of bit-exact reuse and a minimum of local variances. -
The trust chain matters, from the boot loader all the way to the
apps. This means all code that is run must be cryptographically
validated before it is run. All storage must be cryptographically
protected: public data must be integrity checked; private data must
remain confidential.This is in fact where big distributions currently fail pretty
badly. I would go as far as saying that SecureBoot on Linux
distributions is mostly security theater at this point, if you so
will. That’s because the initrd that unlocks your FDE (i.e. the
cryptographic concept that protects the rest of your system) is not
signed or protected in any way. It’s trivial to modify for an
attacker with access to your hard disk in an undetectable way, and
collect your FDE passphrase. The involved bureaucracy around the
implementation of UEFI SecureBoot of the big distributions is to a
large degree pointless if you ask me, given that once the kernel is
assumed to be in a good state, as the next step the system invokes
completely unsafe code with full privileges.This is a fault of current Linux distributions though, not of
SecureBoot in general. Other OSes use this functionality in more
useful ways, and we should correct that too. -
Pretty much the same thing: offline security matters. I want
my data to be reasonably safe at rest, i.e. cryptographically
inaccessible even when I leave my laptop in my hotel room,
suspended. -
Everything should be cryptographically measured, so that remote
attestation is supported for as much software shipped on the OS as
possible. -
Everything should be self descriptive, have single sources of truths
that are closely attached to the object itself, instead of stored
externally. -
Everything should be self-updating. Today we know that software is
never bug-free, and thus requires a continuous update cycle. Not
only the OS itself, but also any extensions, services and apps
running on it. -
Everything should be robust in respect to aborted OS operations,
power loss and so on. It should be robust towards hosed OS updates
(regardless if the download process failed, or the image was
buggy), and not require user interaction to recover from them. -
There must always be a way to put the system back into a
well-defined, guaranteed safe state (“factory reset”). This
includes that all sensitive data from earlier uses becomes
cryptographically inaccessible. -
The OS should enforce clear separation between vendor resources,
system resources and user resources: conceptually and when it comes
to cryptographical protection. -
Things should be adaptive: the system should come up and make the
best of the system it runs on, adapt to the storage and
hardware. Moreover, the system should support execution on bare
metal equally well as execution in a VM environment and in a
container environment (i.e.systemd-nspawn). -
Things should not require explicit installation. i.e. every image
should be a live image. For installation it should be sufficient to
ddan OS image onto disk. Thus, strong focus on “instantiate on
first boot”, rather than “instantiate before first boot”. -
Things should be reasonably minimal. The image the system starts
its life with should be quick to download, and not include
resources that can as well be created locally later. -
System identity, local cryptographic keys and so on should be
generated locally, not be pre-provisioned, so that there’s no leak
of sensitive data during the transport onto the system possible. -
Things should be reasonably democratic and hackable. It should be
easy to fork an OS, to modify an OS and still get reasonable
cryptographic protection. Modifying your OS should not necessarily
imply that your “warranty is voided” and you lose all good
properties of the OS, if you so will. -
Things should be reasonably modular. The privileged part of the
core OS must be extensible, including on the individual system.
It’s not sufficient to support extensibility just through
high-level UI applications. -
Things should be reasonably uniform, i.e. ideally the same formats
and cryptographic properties are used for all components of the
system, regardless if for the host OS itself or the payloads it
receives and runs. -
Even taking all these goals into consideration, it should still be
close to traditional Linux distributions, and take advantage of what
they are really good at: integration and security update cycles.
Now that we know our goals and requirements, let’s start designing the
OS along these lines.
Hermetic /usr/
First of all the OS resources (code, data files, …) should be
hermetic in an immutable /usr/. This means that a /usr/ tree
should carry everything needed to set up the minimal set of
directories and files outside of /usr/ to make the system work. This
/usr/ tree can then be mounted read-only into the writable root file
system that then will eventually carry the local configuration, state
and user data in /etc/, /var/ and /home/ as usual.
Thankfully, modern distributions are surprisingly close to working
without issues in such a hermetic context. Specifically, Fedora works
mostly just fine: it has adopted the /usr/ merge and the declarative
systemd-sysusers
and
systemd-tmpfiles
components quite comprehensively, which means the directory trees
outside of /usr/ are automatically generated as needed if missing.
In particular /etc/passwd and /etc/group (and related files) are
appropriately populated, should they be missing entries.
In my model a hermetic OS is hence comprehensively defined within
/usr/: combine the /usr/ tree with an empty, otherwise unpopulated
root file system, and it will boot up successfully, automatically
adding the strictly necessary files, and resources that are necessary
to boot up.
Monopolizing vendor OS resources and definitions in an immutable
/usr/ opens multiple doors to us:
-
We can apply
dm-verityto the whole/usr/tree, i.e. guarantee
structural, cryptographic integrity on the whole vendor OS resources
at once, with full file system metadata. -
We can implement updates to the OS easily: by implementing an A/B
update scheme on the/usr/tree we can update the OS resources
atomically and robustly, while leaving the rest of the OS environment
untouched. -
We can implement factory reset easily: erase the root file system
and reboot. The hermetic OS in/usr/has all the information it
needs to set up the root file system afresh — exactly like in a new
installation.
Initial Look at the Partition Table
So let’s have a look at a suitable partition table, taking a hermetic
/usr/ into account. Let’s conceptually start with a table of four
entries:
-
An UEFI System Partition (required by firmware to boot)
-
Immutable, Verity-protected, signed file system with the
/usr/tree in version A -
Immutable, Verity-protected, signed file system with the
/usr/tree in version B -
A writable, encrypted root file system
(This is just for initial illustration here, as we’ll see later it’s
going to be a bit more complex in the end.)
The Discoverable Partitions
Specification provides
suitable partition types UUIDs for all of the above partitions. Which
is great, because it makes the image self-descriptive: simply by
looking at the image’s GPT table we know what to mount where. This
means we do not need a manual /etc/fstab, and a multitude of tools
such as systemd-nspawn and similar can operate directly on the disk
image and boot it up.
Booting
Now that we have a rough idea how to organize the partition table,
let’s look a bit at how to boot into that. Specifically, in my model
“unified kernels” are the way to go, specifically those implementing
Boot Loader Specification Type #2. These are basically
kernel images that have an initial RAM disk attached to them, as well as
a kernel command line, a boot splash image and possibly more, all
wrapped into a single UEFI PE binary. By combining these into one we
achieve two goals: they become extremely easy to update (i.e. drop in
one file, and you update kernel+initrd) and more importantly, you can
sign them as one for the purpose of UEFI SecureBoot.
In my model, each version of such a kernel would be associated with
exactly one version of the /usr/ tree: both are always updated at
the same time. An update then becomes relatively simple: drop in one
new /usr/ file system plus one kernel, and the update is complete.
The boot loader used for all this would be
systemd-boot,
of course. It’s a very simple loader, and implements the
aforementioned boot loader specification. This means it requires no
explicit configuration or anything: it’s entirely sufficient to drop
in one such unified kernel file, and it will be picked up, and be made
a candidate to boot into.
You might wonder how to configure the root file system to boot from
with such a unified kernel that contains the kernel command line and
is signed as a whole and thus immutable. The idea here is to use the
usrhash= kernel command line option implemented by
systemd-veritysetup-generator
and
systemd-fstab-generator. It
does two things: it will search and set up a dm-verity volume for
the /usr/ file system, and then mount it. It takes the root hash
value of the dm-verity Merkle tree as the parameter. This hash is
then also used to find the /usr/ partition in the GPT partition
table, under the assumption that the partition UUIDs are derived from
it, as per the suggestions in the discoverable partitions
specification (see above).
systemd-boot (if not told otherwise) will do a version sort of the
kernel image files it finds, and then automatically boot the newest
one. Picking a specific kernel to boot will also fixate which version
of the /usr/ tree to boot into, because — as mentioned — the Verity
root hash of it is built into the kernel command line the unified
kernel image contains.
In my model I’d place the kernels directly into the UEFI System
Partition (ESP), in order to simplify things. (systemd-boot also
supports reading them from a separate boot partition, but let’s not
complicate things needlessly, at least for now.)
So, with all this, we now already have a boot chain that goes
something like this: once the boot loader is run, it will pick the
newest kernel, which includes the initial RAM disk and a secure
reference to the /usr/ file system to use. This is already
great. But a /usr/ alone won’t make us happy, we also need a root
file system. In my model, that file system would be writable, and the
/etc/ and /var/ hierarchies would be located directly on it. Since
these trees potentially contain secrets (SSH keys, …) the root file
system needs to be encrypted. We’ll use LUKS2 for this, of course. In
my model, I’d bind this to the TPM2 chip (for compatibility with
systems lacking one, we can find a suitable fallback, which then
provides weaker guarantees, see below). A TPM2 is a security chip
available in most modern PCs. Among other things it contains a
persistent secret key that can be used to encrypt data, in a way that
only if you possess access to it and can prove you are using validated
software you can decrypt it again. The cryptographic measuring I
mentioned earlier is what allows this to work. But … let’s not get
lost too much in the details of TPM2 devices, that’d be material for a
novel, and this blog story is going to be way too long already.
What does using a TPM2 bound key for unlocking the root file system
get us? We can encrypt the root file system with it, and you can only
read or make changes to the root file system if you also possess the
TPM2 chip and run our validated version of the OS. This protects us
against an evil maid scenario to some level: an attacker cannot
just copy the hard disk of your laptop while you leave it in your
hotel room, because unless the attacker also steals the TPM2 device it
cannot be decrypted. The attacker can also not just modify the root
file system, because such changes would be detected on next boot
because they aren’t done with the right cryptographic key.
So, now we have a system that already can boot up somewhat completely,
and run userspace services. All code that is run is verified in some
way: the /usr/ file system is Verity protected, and the root hash of
it is included in the kernel that is signed via UEFI SecureBoot. And
the root file system is locked to the TPM2 where the secret key is
only accessible if our signed OS + /usr/ tree is used.
(One brief intermission here: so far all the components I am
referencing here exist already, and have been shipped in systemd and
other projects already, including the TPM2 based disk
encryption. There’s one thing missing here however at the moment that
still needs to be developed (happy to take PRs!): right now TPM2 based
LUKS2 unlocking is bound to PCR hash values. This is hard to work with
when implementing updates — what we’d need instead is unlocking by
signatures of PCR hashes. TPM2 supports this, but we don’t support it
yet in our systemd-cryptsetup + systemd-cryptenroll stack.)
One of the goals mentioned above is that cryptographic key material
should always be generated locally on first boot, rather than
pre-provisioned. This of course has implications for the encryption
key of the root file system: if we want to boot into this system we
need the root file system to exist, and thus a key already generated
that it is encrypted with. But where precisely would we generate it if
we have no installer which could generate while installing (as it is
done in traditional Linux distribution installers). My proposed
solution here is to use
systemd-repart,
which is a declarative, purely additive repartitioner. It can run from
the initrd to create and format partitions on boot, before
transitioning into the root file system. It can also format the
partitions it creates and encrypt them, automatically enrolling an
TPM2-bound key.
So, let’s revisit the partition table we mentioned earlier. Here’s
what in my model we’d actually ship in the initial image:
-
An UEFI System Partition (ESP)
-
An immutable, Verity-protected, signed file system with the
/usr/tree in version A
And that’s already it. No root file system, no B /usr/ partition,
nothing else. Only two partitions are shipped: the ESP with the
systemd-boot loader and one unified kernel image, and the A version
of the /usr/ partition. Then, on first boot systemd-repart will
notice that the root file system doesn’t exist yet, and will create
it, encrypt it, and format it, and enroll the key into the TPM2. It
will also create the second /usr/ partition (B) that we’ll need for
later A/B updates (which will be created empty for now, until the
first update operation actually takes place, see below). Once done the
initrd will combine the fresh root file system with the shipped
/usr/ tree, and transition into it. Because the OS is hermetic in
/usr/ and contains all the systemd-tmpfiles and systemd-sysuser
information it can then set up the root file system properly and
create any directories and symlinks (and maybe a few files) necessary
to operate.
Besides the fact that the root file system’s encryption keys are
generated on the system we boot from and never leave it, it is also
pretty nice that the root file system will be sized dynamically,
taking into account the physical size of the backing storage. This is
perfect, because on first boot the image will automatically adapt to what
it has been dd‘ed onto.
Factory Reset
This is a good point to talk about the factory reset logic, i.e. the
mechanism to place the system back into a known good state. This is
important for two reasons: in our laptop use case, once you want to
pass the laptop to someone else, you want to ensure your data is fully
and comprehensively erased. Moreover, if you have reason to believe
your device was hacked you want to revert the device to a known good
state, i.e. ensure that exploits cannot persist. systemd-repart
already has a mechanism for it. In the declarations of the partitions
the system should have, entries may be marked to be candidates for
erasing on factory reset. The actual factory reset is then requested
by one of two means: by specifying a specific kernel command line
option (which is not too interesting here, given we lock that down via
UEFI SecureBoot; but then again, one could also add a second kernel to
the ESP that is identical to the first, with only different that it
lists this command line option: thus when the user selects this entry
it will initiate a factory reset) — and via an EFI variable that can
be set and is honoured on the immediately following boot. So here’s
how a factory reset would then go down: once the factory reset is
requested it’s enough to reboot. On the subsequent boot
systemd-repart runs from the initrd, where it will honour the
request and erase the partitions marked for erasing. Once that is
complete the system is back in the state we shipped the system in:
only the ESP and the /usr/ file system will exist, but the root file
system is gone. And from here we can continue as on the original first
boot: create a new root file system (and any other partitions), and
encrypt/set it up afresh.
So now we have a nice setup, where everything is either signed or
encrypted securely. The system can adapt to the system it is booted on
automatically on first boot, and can easily be brought back into a
well defined state identical to the way it was shipped in.
Modularity
But of course, such a monolithic, immutable system is only useful for
very specific purposes. If /usr/ can’t be written to, – at least in
the traditional sense – one cannot just go and install a new software
package that one needs. So here two goals are superficially
conflicting: on one hand one wants modularity, i.e. the ability to
add components to the system, and on the other immutability, i.e. that
precisely this is prohibited.
So let’s see what I propose as a middle ground in my model. First,
what’s the precise use case for such modularity? I see a couple of
different ones:
-
For some cases it is necessary to extend the system itself at the
lowest level, so that the components added in extend (or maybe even
replace) the resources shipped in the base OS image, so that they live
in the same namespace, and are subject to the same security
restrictions and privileges. Exposure to the details of the base OS
and its interface for this kind of modularity is at the maximum.Example: a module that adds a debugger or tracing tools into the
system. Or maybe an optional hardware driver module. -
In other cases, more isolation is preferable: instead of extending
the system resources directly, additional services shall be added
in that bring their own files, can live in their own namespace
(but with “windows” into the host namespaces), however still are
system components, and provide services to other programs, whether
local or remote. Exposure to the details of the base OS for this
kind of modularity is restricted: it mostly focuses on the
ability to consume and provide IPC APIs from/to the
system. Components of this type can still be highly privileged, but
the level of integration is substantially smaller than for the type
explained above.Example: a module that adds a specific VPN connection service to
the OS. -
Finally, there’s the actual payload of the OS. This stuff is
relatively isolated from the OS and definitely from each other. It
mostly consumes OS APIs, and generally doesn’t provide OS
APIs. This kind of stuff runs with minimal privileges, and in its
own namespace of concepts.Example: a desktop app, for reading your emails.
Of course, the lines between these three types of modules are blurry,
but I think distinguishing them does make sense, as I think different
mechanisms are appropriate for each. So here’s what I’d propose in my
model to use for this.
-
For the system extension case I think the
systemd-sysext
images are appropriate. This tool operates on
system extension images that are very similar to the host’s disk
image: they also contain a/usr/partition, protected by
Verity. However, they just include additions to the host image:
binaries that extend the host. When such a system extension image
is activated, it is merged via an immutableoverlayfsmount into
the host’s/usr/tree. Thus any file shipped in such a system
extension will suddenly appear as if it was part of the host OS
itself. For optional components that should be considered part of
the OS more or less this is a very simple and powerful way to
combine an immutable OS with an immutable extension. Note that most
likely extensions for an OS matching this tool should be built at
the same time within the same update cycle scheme as the host OS
itself. After all, the files included in the extensions will have
dependencies on files in the system OS image, and care must be
taken that these dependencies remain in order. -
For adding in additional somewhat isolated system services in my
model, Portable Services
are the proposed tool of choice. Portable services are in most ways
just like regular system services; they could be included in the
system OS image or an extension image. However, portable services
use
RootImage=
to run off separate disk images, thus within their own
namespace. Images set up this way have various ways to integrate
into the host OS, as they are in most ways regular system services,
which just happen to bring their own directory tree. Also, unlike
regular system services, for them sandboxing is opt-out rather than
opt-in. In my model, here too the disk images are Verity protected
and thus immutable. Just like the host OS they are GPT disk images
that come with a/usr/partition and Verity data, along with
signing. -
Finally, the actual payload of the OS, i.e. the apps. To be useful
in real life here it is important to hook into existing ecosystems,
so that a large set of apps are available. Given that on Linux
flatpak (or on servers OCI containers) are the established format
that pretty much won they are probably the way to go. That said, I
think both of these mechanisms have relatively weak properties, in
particular when it comes to security, since
immutability/measurements and similar are not provided. This means,
unlike for system extensions and portable services a complete trust
chain with attestation and per-app cryptographically protected data
is much harder to implement sanely.
What I’d like to underline here is that the main system OS image, as
well as the system extension images and the portable service images
are put together the same way: they are GPT disk images, with one
immutable file system and associated Verity data. The latter two
should also contain a PKCS#7 signature for the top-level Verity
hash. This uniformity has many benefits: you can use the same tools to
build and process these images, but most importantly: by using a
single way to validate them throughout the stack (i.e. Verity, in the
latter cases with PKCS#7 signatures), validation and measurement is
straightforward. In fact it’s so obvious that we don’t even have to
implement it in systemd: the kernel has direct support for this Verity
signature checking natively already (IMA).
So, by composing a system at runtime from a host image, extension
images and portable service images we have a nicely modular system
where every single component is cryptographically validated on every
single IO operation, and every component is measured, in its entire
combination, directly in the kernel’s IMA subsystem.
(Of course, once you add the desktop apps or OCI containers on top,
then these properties are lost further down the chain. But well, a lot
is already won, if you can close the chain that far down.)
Note that system extensions are not designed to replicate the fine
grained packaging logic of RPM/dpkg. Of course, systemd-sysext is a
generic tool, so you can use it for whatever you want, but there’s a
reason it does not bring support for a dependency language: the goal
here is not to replicate traditional Linux packaging (we have that
already, in RPM/dpkg, and I think they are actually OK for what they
do) but to provide delivery of larger, coarser sets of functionality,
in lockstep with the underlying OS’ life-cycle and in particular with
no interdependencies, except on the underlying OS.
Also note that depending on the use case it might make sense to also
use system extensions to modularize the initrd step. This is
probably less relevant for a desktop OS, but for server systems it
might make sense to package up support for specific complex storage in
a systemd-sysext system extension, which can be applied to the
initrd that is built into the unified kernel. (In fact, we have been
working on implementing signed yet modular initrd support to general
purpose Fedora this way.)
Note that portable services are composable from system extension too,
by the way. This makes them even more useful, as you can share a
common runtime between multiple portable service, or even use the host
image as common runtime for portable services. In this model a common
runtime image is shared between one or more system extensions, and
composed at runtime via an overlayfs instance.
More Modularity: Secondary OS Installs
Having an immutable, cryptographically locked down host OS is great I
think, and if we have some moderate modularity on top, that’s also
great. But oftentimes it’s useful to be able to depart/compromise for
some specific use cases from that, i.e. provide a bridge for example to
allow workloads designed around RPM/dpkg package management to coexist
reasonably nicely with such an immutable host.
For this purpose in my model I’d propose using systemd-nspawn
containers. The containers are focused on OS containerization,
i.e. they allow you to run a full OS with init system and everything
as payload (unlike for example Docker containers which focus on a
single service, and where running a full OS in it is a mess).
Running systemd-nspawn containers for such secondary OS installs has
various nice properties. One of course is that systemd-nspawn
supports the same level of cryptographic image validation that we rely
on for the host itself. Thus, to some level the whole OS trust chain
is reasonably recursive if desired: the firmware validates the OS, and the OS can
validate a secondary OS installed within it. In fact, we can run our
trusted OS recursively on itself and get similar security guarantees!
Besides these security aspects, systemd-nspawn also has really nice
properties when it comes to integration with the host. For example the
--bind-user= permits binding a host user record and their directory
into a container as a simple one step operation. This makes it
extremely easy to have a single user and $HOME but share it
concurrently with the host and a zoo of secondary OSes in
systemd-nspawn containers, which each could run different
distributions even.
Developer Mode
Superficially, an OS with an immutable /usr/ appears much less
hackable than an OS where everything is writable. Moreover, an OS
where everything must be signed and cryptographically validated makes
it hard to insert your own code, given you are unlikely to possess
access to the signing keys.
To address this issue other systems have supported a “developer” mode:
when entered the security guarantees are disabled, and the system can
be freely modified, without cryptographic validation. While that’s a
great concept to have I doubt it’s what most developers really want:
the cryptographic properties of the OS are great after all, it sucks
having to give them up once developer mode is activated.
In my model I’d thus propose two different approaches to this
problem. First of all, I think there’s value in allowing users to
additively extend/override the OS via local developer system
extensions. With
this scheme the underlying cryptographic validation would remain in
tact, but — if this form of development mode is explicitly enabled –
the developer could add in more resources from local storage, that are
not tied to the OS builder’s chain of trust, but a local one
(i.e. simply backed by encrypted storage of some form).
The second approach is to make it easy to extend (or in fact replace)
the set of trusted validation keys, with local ones that are under the
control of the user, in order to make it easy to operate with kernel,
OS, extension, portable service or container images signed by the
local developer without involvement of the OS builder. This is
relatively easy to do for components down the trust chain, i.e. the
elements further up the chain should optionally allow additional
certificates to allow validation with.
(Note that systemd currently has no explicit support for a
“developer” mode like this. I think we should add that sooner or later
however.)
Democratizing Code Signing
Closely related to the question of developer mode is the question of
code signing. If you ask me, the status quo of UEFI SecureBoot code
signing in the major Linux distributions is pretty sad. The work to
get stuff signed is massive, but in effect it delivers very little in
return: because initrds are entirely unprotected, and reside on
partitions lacking any form of cryptographic integrity protection any
attacker can trivially easily modify the boot process of any such
Linux system and freely collected FDE passphrases entered. There’s
little value in signing the boot loader and kernel in a complex
bureaucracy if it then happily loads entirely unprotected code that
processes the actually relevant security credentials: the FDE
keys.
In my model, through use of unified kernels this important gap is
closed, hence UEFI SecureBoot code signing becomes an integral part of
the boot chain from firmware to the host OS. Unfortunately, code
signing – and having something a user can locally hack, is to some
level conflicting. However, I think we can improve the situation here,
and put more emphasis on enrolling developer keys in the trust chain
easily. Specifically, I see one relevant approach here: enrolling keys
directly in the firmware is something that we should make less of a
theoretical exercise and more something we can realistically
deploy. See this work in
progress
making this more automatic and eventually safe. Other approaches are
thinkable (including some that build on existing MokManager
infrastructure), but given the politics involved, are harder to
conclusively implement.
Running the OS itself in a container
What I explain above is put together with running on a bare metal
system in mind. However, one of the stated goals is to make the OS
adaptive enough to also run in a container environment (specifically:
systemd-nspawn) nicely. Booting a disk image on bare metal or in a
VM generally means that the UEFI firmware validates and invokes the
boot loader, and the boot loader invokes the kernel which then
transitions into the final system. This is different for containers:
here the container manager immediately calls the init system, i.e. PID
1. Thus the validation logic must be different: cryptographic
validation must be done by the container manager. In my model this is
solved by shipping the OS image not only with a Verity data partition
(as is already necessary for the UEFI SecureBoot trust chain, see
above), but also with another partition, containing a PKCS#7 signature
of the root hash of said Verity partition. This of course is exactly
what I propose for both the system extension and portable service
image. Thus, in my model the images for all three uses are put
together the same way: an immutable /usr/ partition, accompanied by
a Verity partition and a PKCS#7 signature partition. The OS image
itself then has two ways “into” the trust chain: either through the
signed unified kernel in the ESP (which is used for bare metal and VM
boots) or by using the PKCS#7 signature stored in the partition
(which is used for container/systemd-nspawn boots).
Parameterizing Kernels
A fully immutable and signed OS has to establish trust in the user
data it makes use of before doing so. In the model I describe here,
for /etc/ and /var/ we do this via disk encryption of the root
file system (in combination with integrity checking). But the point
where the root file system is mounted comes relatively late in the
boot process, and thus cannot be used to parameterize the boot
itself. In many cases it’s important to be able to parameterize the
boot process however.
For example, for the implementation of the developer mode indicated
above it’s useful to be able to pass this fact safely to the initrd,
in combination with other fields (e.g. hashed root password for
allowing in-initrd logins for debug purposes). After all, if the
initrd is pre-built by the vendor and signed as whole together with
the kernel it cannot be modified to carry such data directly (which is
in fact how parameterizing of the initrd to a large degree was traditionally
done).
In my model this is achieved through system
credentials, which allow passing
parameters to systems (and services for the matter) in an encrypted
and authenticated fashion, bound to the TPM2 chip. This means that we
can securely pass data into the initrd so that it can be authenticated
and decrypted only on the system it is intended for and with the
unified kernel image it was intended for.
Swap
In my model the OS would also carry a swap partition. For the simple
reason that only then
systemd-oomd.service
can provide the best results. Also see In defence of swap: common
misconceptions
Updating Images
We have a rough idea how the system shall be organized now, let’s next
focus on the deployment cycle: software needs regular update cycles,
and software that is not updated regularly is a security
problem. Thus, I am sure that any modern system must be automatically
updated, without this requiring avoidable user interaction.
In my model, this is the job for
systemd-sysupdate. It’s
a relatively simple A/B image updater: it operates either on
partitions, on regular files in a directory, or on subdirectories in a
directory. Each entry has a version (which is encoded in the GPT
partition label for partitions, and in the filename for regular files
and directories): whenever an update is initiated the oldest version
is erased, and the newest version is downloaded.
With the setup described above a system update becomes a really simple
operation. On each update the systemd-sysupdate tool downloads a
/usr/ file system partition, an accompanying Verity partition, a
PKCS#7 signature partition, and drops it into the host’s partition
table (where it possibly replaces the oldest version so far stored
there). Then it downloads a unified kernel image and drops it into
the EFI System Partition’s /EFI/Linux (as per Boot Loader
Specification; possibly erase the oldest such file there). And that’s
already the whole update process: four files are downloaded from the
server, unpacked and put in the most straightforward of ways into the
partition table or file system. Unlike in other OS designs there’s no
mechanism required to explicitly switch to the newer version, the
aforementioned systemd-boot logic will automatically pick the newest
kernel once it is dropped in.
Above we talked a lot about modularity, and how to put systems
together as a combination of a host OS image, system extension images
for the initrd and the host, portable service images and
systemd-nspawn container images. I already emphasized that these
image files are actually always the same: GPT disk images with
partition definitions that match the Discoverable Partition
Specification. This comes very handy when thinking about updating: we
can use the exact same systemd-sysupdate tool for updating these
other images as we use for the host image. The uniformity of the
on-disk format allows us to update them uniformly too.
Boot Counting + Assessment
Automatic OS updates do not come without risks: if they happen
automatically, and an update goes wrong this might mean your system
might be automatically updated into a brick. This of course is less
than ideal. Hence it is essential to address this reasonably
automatically. In my model, there’s systemd’s Automatic Boot
Assessment for
that. The mechanism is simple: whenever a new unified kernel image is
dropped into the system it will be stored with a small integer counter
value included in the filename. Whenever the unified kernel image is
selected for booting by systemd-boot, it is decreased by one. Once
the system booted up successfully (which is determined by userspace)
the counter is removed from the file name (which indicates “this entry
is known to work”). If the counter ever hits zero, this indicates that
it tried to boot it a couple of times, and each time failed, thus is
apparently “bad”. In this case systemd-boot will not consider the
kernel anymore, and revert to the next older (that doesn’t have a
counter of zero).
By sticking the boot counter into the filename of the unified kernel
we can directly attach this information to the kernel, and thus need
not concern ourselves with cleaning up secondary information about the
kernel when the kernel is removed. Updating with a tool like
systemd-sysupdate remains a very simple operation hence: drop one
old file, add one new file.
Picking the Newest Version
I already mentioned that systemd-boot automatically picks the newest
unified kernel image to boot, by looking at the version encoded in the
filename. This is done via a simple
strverscmp()
call (well, truth be told, it’s a modified version of that call,
different from the one implemented in libc, because real-life package
managers use more complex rules for comparing versions these days, and
hence it made sense to do that here too). The concept of having
multiple entries of some resource in a directory, and picking the
newest one automatically is a powerful concept, I think. It means
adding/removing new versions is extremely easy (as we discussed above,
in systemd-sysupdate context), and allows stateless determination of
what to use.
If systemd-boot can do that, what about system extension images,
portable service images, or systemd-nspawn container images that do
not actually use systemd-boot as the entrypoint? All these tools
actually implement the very same logic, but on the partition level: if
multiple suitable /usr/ partitions exist, then the newest is determined
by comparing the GPT partition label of them.
This is in a way the counterpart to the systemd-sysupdate update
logic described above: we always need a way to determine which
partition to actually then use after the update took place: and this
becomes very easy each time: enumerate possible entries, pick the
newest as per the (modified) strverscmp() result.
Home Directory Management
In my model the device’s users and their home directories are managed
by
systemd-homed. This
means they are relatively self-contained and can be migrated easily
between devices. The numeric UID assignment for each user is done at
the moment of login only, and the files in the home directory are
mapped as needed via a uidmap mount. It also allows us to protect
the data of each user individually with a credential that belongs to
the user itself. i.e. instead of binding confidentiality of the user’s
data to the system-wide full-disk-encryption each user gets their own
encrypted home directory where the user’s authentication token
(password, FIDO2 token, PKCS#11 token, recovery key…) is used as
authentication and decryption key for the user’s data. This brings
a major improvement for security as it means the user’s data is
cryptographically inaccessible except when the user is actually logged
in.
It also allows us to correct another major issue with traditional
Linux systems: the way how data encryption works during system
suspend. Traditionally on Linux the disk encryption credentials
(e.g. LUKS passphrase) is kept in memory also when the system is
suspended. This is a bad choice for security, since many (most?) of us
probably never turn off their laptop but suspend it instead. But if
the decryption key is always present in unencrypted form during the
suspended time, then it could potentially be read from there by a
sufficiently equipped attacker.
By encrypting the user’s home directory with the user’s authentication
token we can first safely “suspend” the home directory before going to
the system suspend state (i.e. flush out the cryptographic keys needed
to access it). This means any process currently accessing the home
directory will be frozen for the time of the suspend, but that’s
expected anyway during a system suspend cycle. Why is this better than
the status quo ante? In this model the home directory’s cryptographic
key material is erased during suspend, but it can be safely reacquired
on resume, from system code. If the system is only encrypted as a
whole however, then the system code itself couldn’t reauthenticate the
user, because it would be frozen too. By separating home directory
encryption from the root file system encryption we can avoid this
problem.
Partition Setup
So we discussed the organization of the partitions OS images multiple
times in the above, each time focusing on a specific aspect. Let’s
now summarize how this should look like all together.
In my model, the initial, shipped OS image should look roughly like this:
- (1) An UEFI System Partition, with
systemd-bootas boot loader and one unified kernel - (2) A
/usr/partition (version “A”), with a labelfooOS_0.7(under the assumption we called our projectfooOSand the image version is0.7). - (3) A Verity partition for the
/usr/partition (version “A”), with the same label - (4) A partition carrying the Verity root hash for the
/usr/partition (version “A”), along with a PKCS#7 signature of it, also with the same label
On first boot this is augmented by systemd-repart like this:
- (5) A second
/usr/partition (version “B”), initially with a label_empty(which is the labelsystemd-sysupdateuses to mark partitions that currently carry no valid payload) - (6) A Verity partition for that (version “B”), similar to the above case, also labelled
_empty - (7) And ditto a Verity root hash partition with a PKCS#7 signature (version “B”), also labelled
_empty - (8) A root file system, encrypted and locked to the TPM2
- (9) A home file system, integrity protected via a key also in TPM2 (encryption is unnecessary, since
systemd-homedadds that on its own, and it’s nice to avoid duplicate encryption) - (10) A swap partition, encrypted and locked to the TPM2
Then, on the first OS update the partitions 5, 6, 7 are filled with a
new version of the OS (let’s say 0.8) and thus get their label
updated to fooOS_0.8. After a boot, this version is active.
On a subsequent update the three partitions fooOS_0.7 get wiped and
replaced by fooOS_0.9 and so on.
On factory reset, the partitions 8, 9, 10 are deleted, so that
systemd-repart recreates them, using a new set of cryptographic
keys.
Here’s a graphic that hopefully illustrates the partition stable from
shipped image, through first boot, multiple update cycles and eventual
factory reset:

Trust Chain
So let’s summarize the intended chain of trust (for bare metal/VM
boots) that ensures every piece of code in this model is signed
and validated, and any system secret is locked to TPM2.
-
First, firmware (or possibly shim) authenticates
systemd-boot. -
Once
systemd-bootpicks a unified kernel image to boot, it is
also authenticated by firmware/shim. -
The unified kernel image contains an initrd, which is the first
userspace component that runs. It finds any system extensions passed
into the initrd, and sets them up through Verity. The kernel will
validate the Verity root hash signature of these system extension
images against its usual keyring. -
The initrd also finds credentials passed in, then securely unlocks
(which means: decrypts + authenticates) them with a secret from the
TPM2 chip, locked to the kernel image itself. -
The kernel image also contains a kernel command line which contains
ausrhash=option that pins the root hash of the/usr/partition
to use. -
The initrd then unlocks the encrypted root file system, with a
secret bound to the TPM2 chip. -
The system then transitions into the main system, i.e. the
combination of the Verity protected/usr/and the encrypted root
files system. It then activates two more encrypted (and/or
integrity protected) volumes for/home/and swap, also with a
secret tied to the TPM2 chip.
Here’s an attempt to illustrate the above graphically:

This is the trust chain of the basic OS. Validation of system
extension images, portable service images, systemd-nspawn container
images always takes place the same way: the kernel validates these
Verity images along with their PKCS#7 signatures against the kernel’s
keyring.
File System Choice
In the above I left the choice of file systems unspecified. For the
immutable /usr/ partitions squashfs might be a good candidate, but
any other that works nicely in a read-only fashion and generates
reproducible results is a good choice, too. The home directories as managed
by systemd-homed should certainly use btrfs, because it’s the only
general purpose file system supporting online grow and shrink, which
systemd-homed can take benefit of, to manage storage.
For the root file system btrfs is likely also the best idea. That’s
because we intend to use LUKS/dm-crypt underneath, which by default
only provides confidentiality, not authenticity of the data (unless
combined with dm-integrity). Since btrfs (unlike xfs/ext4) does
full data checksumming it’s probably the best choice here, since it
means we don’t have to use dm-integrity (which comes at a higher
performance cost).
OS Installation vs. OS Instantiation
In the discussion above a lot of focus was put on setting up the OS
and completing the partition layout and such on first boot. This means
installing the OS becomes as simple as dd-ing (i.e. “streaming”) the
shipped disk image into the final HDD medium. Simple, isn’t it?
Of course, such a scheme is just too simple for many setups in real
life. Whenever multi-boot is required (i.e. co-installing an OS
implementing this model with another unrelated one), dd-ing a disk
image onto the HDD is going to overwrite user data that was supposed
to be kept around.
In order to cover for this case, in my model, we’d use
systemd-repart (again!) to allow streaming the source disk image
into the target HDD in a smarter, additive way. The tool after all is
purely additive: it will add in partitions or grow them if they are
missing or too small. systemd-repart already has all the necessary
provisions to not only create a partition on the target disk, but also
copy blocks from a raw installer disk. An install operation would then
become a two stop process: one invocation of systemd-repart that
adds in the /usr/, its Verity and the signature partition to the
target medium, populated with a copy of the same partition of the
installer medium. And one invocation of bootctl that installs the
systemd-boot boot loader in the ESP. (Well, there’s one thing
missing here: the unified OS kernel also needs to be dropped into the
ESP. For now, this can be done with a simple cp call. In the long
run, this should probably be something bootctl can do as well, if
told so.)
So, with this scheme we have a simple scheme to cover all bases: we
can either just dd an image to disk, or we can stream an image onto
an existing HDD, adding a couple of new partitions and files to the
ESP.
Of course, in reality things are more complex than that even: there’s
a good chance that the existing ESP is simply too small to carry
multiple unified kernels. In my model, the way to address this is by
shipping two slightly different systemd-repart partition definition
file sets: the ideal case when the ESP is large enough, and a
fallback case, where it isn’t and where we then add in an addition
XBOOTLDR partition (as per the Discoverable Partitions
Specification). In that mode the ESP carries the boot loader, but the
unified kernels are stored in the XBOOTLDR partition. This scenario is
not quite as simple as the XBOOTLDR-less scenario described first, but
is equally well supported in the various tools. Note that
systemd-repart can be told size constraints on the partitions it
shall create or augment, thus to implement this scheme it’s enough to
invoke the tool with the fallback partition scheme if invocation with
the ideal scheme fails.
Either way: regardless how the partitions, the boot loader and the
unified kernels ended up on the system’s hard disk, on first boot the
code paths are the same again: systemd-repart will be called to
augment the partition table with the root file system, and properly
encrypt it, as was already discussed earlier here. This means: all
cryptographic key material used for disk encryption is generated on
first boot only, the installer phase does not encrypt anything.
Live Systems vs. Installer Systems vs. Installed Systems
Traditionally on Linux three types of systems were common: “installed”
systems, i.e. that are stored on the main storage of the device and
are the primary place people spend their time in; “installer” systems
which are used to install them and whose job is to copy and setup the
packages that make up the installed system; and “live” systems, which
were a middle ground: a system that behaves like an installed system
in most ways, but lives on removable media.
In my model I’d like to remove the distinction between these three
concepts as much as possible: each of these three images should carry
the exact same /usr/ file system, and should be suitable to be
replicated the same way. Once installed the resulting image can also
act as an installer for another system, and so on, creating a certain
“viral” effect: if you have one image or installation it’s
automatically something you can replicate 1:1 with a simple
systemd-repart invocation.
Building Images According to this Model
The above explains how the image should look like and how its first
boot and update cycle will modify it. But this leaves one question
unanswered: how to actually build the initial image for OS instances
according to this model?
Note that there’s nothing too special about the images following this
model: they are ultimately just GPT disk images with Linux file
systems, following the Discoverable Partition Specification. This
means you can use any set of tools of your choice that can put
together GPT disk images for compliant images.
I personally would use mkosi for
this purpose though. It’s designed to generate compliant images, and
has a rich toolset for SecureBoot and signed/Verity file systems
already in place.
What is key here is that this model doesn’t depart from RPM and dpkg,
instead it builds on top of that: in this model they are excellent for
putting together images on the build host, but deployment onto the
runtime host does not involve individual packages.
I think one cannot underestimate the value traditional distributions
bring, regarding security, integration and general polishing. The
concepts I describe above are inherited from this, but depart from the
idea that distribution packages are a runtime concept and make it a
build-time concept instead.
Note that the above is pretty much independent from the underlying
distribution.
Final Words
I have no illusions, general purpose distributions are not going to
adopt this model as their default any time soon, and it’s not even my
goal that they do that. The above is my personal vision, and I
don’t expect people to buy into it 100%, and that’s fine. However,
what I am interested in is finding the overlaps, i.e. work with people
who buy 50% into this vision, and share the components.
My goals here thus are to:
-
Get distributions to move to a model where images like this can be
built from the distribution easily. Specifically this means that
distributions make their OS hermetic in/usr/. -
Find the overlaps, share components with other projects to revisit
how distributions are put together. This is already happening, see
systemd-tmpfilesandsystemd-sysusersupport in various
distributions, but I think there’s more to share. -
Make people interested in building actual real-world images based
on general purpose distributions adhering to the model described
above. I’d love a “GnomeBook” image with full trust properties,
that is built from true Linux distros, such as Fedora or
ArchLinux.
FAQ
-
What about
ostree? Doesn’tostreealready deliver what this blog story describes?ostreeis fine technology, but in respect to security and
robustness properties it’s not too interesting I think, because
unlike image-based approaches it cannot really deliver
integrity/robustness guarantees easily. To be able to trust an
ostreesetup you have to establish trust into the underlying
file system first, and the complexity of the file system makes
that challenging. To provide an effective offline-secure trust
chain through the whole depth of the stack it is essential to
cryptographically validate every single I/O operation. In an
image-based model this is trivially easy, but inostreemodel
it’s with current file system technology not possible and even if
this is added in one way or another in the future (though I am not
aware of anyone doing file-based integrity that was compatible
withostree‘s hardlink farm model) I think validation is still
at too high a level, since Linux file system developers made very
clear their implementations are not robust to rogue images.With my design I want to deliver similar security guarantees as
ChromeOS does, butostreeis much weaker there, and I see no
perspective of this changing. In a wayostree‘s integrity checks
are similar to RPM’s and enforced on download rather than on
access. In the model I suggest above, it’s always on access, and
thus safe towards offline attacks (i.e. evil maid attacks). In
today’s world, I think offline security is absolutely necessary
though.That said,
ostreedoes have some benefits over the model
described above: it naturally shares file system inodes if many of
the modules/images involved share the same data. It’s thus more
space efficient on disk (and thus also in RAM/cache to some
degree) by default. In my model it would be up to the image
builders to minimize shipping overly redundant disk images, by
making good use of suitably composable system extensions. -
What about configuration management?
At first glance immutable systems and configuration management
don’t go that well together. However, do note, that in the model
I propose above the root file system with all its contents,
including/etc/and/var/is actually writable and can be
modified like on any other typical Linux distribution. The only
exception is/usr/where the immutable OS is hermetic. That
means configuration management tools should work just fine in this
model – up to the point where they are used to install additional
RPM/dpkg packages, because that’s something not allowed in the
model above: packages need to be installed at image build time and
thus on the image build host, not the runtime host. -
What about non-UEFI and non-TPM2 systems?
The above is designed around the feature set of contemporary PCs,
and this means UEFI and TPM2 being available (simply because the
PC is pretty much defined by the Windows platform, and current
versions of Windows require both).I think it’s important to make the best of the features of today’s
PC hardware, and then find suitable fallbacks on more limited
hardware. Specifically this means: if there’s desire to implement
something like the this on non-UEFI or non-TPM2 hardware we should
look for suitable fallbacks for the individual functionality, but
generally try to add glue to the old systems so that conceptually
they behave more like the new systems instead of the other way
round. Or in other words: most of the above is not strictly tied
to UEFI or TPM2, and for many cases already there are reasonably
fallbacks in place for more limited systems. Of course, without
TPM2 many of the security guarantees will be weakened. -
How would you name an OS built that way?
I think a desktop OS built this way if it has the GNOME desktop
should of course be called GnomeBook, to mimic the ChromeBook
name. 😉But in general, I’d call hermetic, adaptive, immutable OSes like this “particles“.
How can you help?
-
Help making Distributions Hermetic in
/usr/!One of the core ideas of the approach described above is to make
the OS hermetic in/usr/, i.e. make it carry a comprehensive
description of what needs to be set up outside of it when
instantiated. Specifically, this means that system users that are
needed are declared insystemd-sysuserssnippets, and skeleton
files and directories are created viasystemd-tmpfiles. Moreover
additional partitions should be declared viasystemd-repart
drop-ins.At this point some distributions (such as Fedora) are (probably
more by accident than on purpose) already mostly hermetic in
/usr/, at least for the most basic parts of the OS. However,
this is not complete: many daemons require to have specific
resources set up in/var/or/etc/before they can work, and
the relevant packages do not carrysystemd-tmpfilesdescriptions
that add them if missing. So there are two ways you could help
here: politically, it would be highly relevant to convince
distributions that an OS that is hermetic in/usr/is highly
desirable and it’s a worthy goal for packagers to get there. More
specifically, it would be desirable if RPM/dpkg packages would
ship with enoughsystemd-tmpfilesinformation so that
configuration files the packages strictly need for operation are
symlinked (or copied) from/usr/share/factory/if they are
missing (even better of course would be if packages from their
upstream sources on would just work with an empty/etc/and
/var/, and create themselves what they need and default to good
defaults in absence of configuration files).Note that distributions that adopted
systemd-sysusers,
systemd-tmpfilesand the/usr/merge are already quite close
to providing an OS that is hermetic in/usr/. These were the
big, the major advancements: making the image fully hermetic
should be less controversial – at least that’s my guess.Also note that making the OS hermetic in
/usr/is not just useful in
scenarios like the above. It also means that stuff like
this
and like
this
can work well. -
Fill in the gaps!
I already mentioned a couple of missing bits and pieces in the
implementation of the overall vision. In thesystemdproject
we’d be delighted to review/merge any PRs that fill in the voids. -
Build your own OS like this!
Of course, while we built all these building blocks and they have
been adopted to various levels and various purposes in the various
distributions, no one so far built an OS that puts things together
just like that. It would be excellent if we had communities that
work on building images like what I propose above. i.e. if you
want to work on making a secure GnomeBook as I suggest above a
reality that would be more than welcome.How could this look like specifically? Pick an existing
distribution, write a set ofmkosidescriptions plus some
additional drop-in files, and then build this on some build
infrastructure. While doing so, report the gaps, and help us
address them.
Further Documentation of Used Components and Concepts
systemd-tmpfilessystemd-sysuserssystemd-bootsystemd-stubsystemd-sysextsystemd-portabled, Portable Services Introductionsystemd-repartsystemd-nspawnsystemd-sysupdatesystemd-creds, System and Service Credentialssystemd-homed- Automatic Boot Assessment
- Boot Loader Specification
- Discoverable Partitions Specification
- Safely Building Images
Earlier Blog Stories Related to this Topic
- The Strange State of Authenticated Boot and Disk Encryption on Generic Linux Distributions
- The Wondrous World of Discoverable GPT Disk Images
- Unlocking LUKS2 volumes with TPM2, FIDO2, PKCS#11 Security Hardware on systemd 248
- Portable Services with systemd v239
- mkosi — A Tool for Generating OS Images
And that’s all for now.
AWS Week in Review – May 2, 2022
Post Syndicated from Steve Roberts original https://aws.amazon.com/blogs/aws/aws-week-in-review-may-2-2022/
Wow, May already! Here in the Pacific Northwest, spring is in full bloom and nature has emerged completely from her winter slumbers. It feels that way here at AWS, too, with a burst of new releases and updates and our in-person summits and other events now in full flow. Two weeks ago, we had the San Francisco summit; last week, we held the London summit and also our .NET Enterprise Developer Day virtual event in EMEA. This week we have the Madrid summit, with more summits and events to come in the weeks ahead. Be sure to check the events section at the end of this post for a summary and registration links.
Last week’s launches
Here are some of the launches and updates last week that caught my eye:
If you’re looking to reduce or eliminate the operational overhead of managing your Apache Kafka clusters, then the general availability of Amazon Managed Streaming for Apache Kafka (MSK) Serverless will be of interest. Starting with the original release of Amazon MSK in 2019, the work needed to set up, scale, and manage Apache Kafka has been reduced, requiring just minutes to create a cluster. With Amazon MSK Serverless, the provisioning, scaling, and management of the required resources is automated, eliminating the undifferentiated heavy-lift. As my colleague Marcia notes in her blog post, Amazon MSK Serverless is a perfect solution when getting started with a new Apache Kafka workload where you don’t know how much capacity you will need or your applications produce unpredictable or highly variable throughput and you don’t want to pay for idle capacity.
Another week, another set of Amazon Elastic Compute Cloud (Amazon EC2) instances! This time around, it’s new storage-optimized I4i instances based on the latest generation Intel Xeon Scalable (Ice Lake) Processors. These new instances are ideal for workloads that need minimal latency, and fast access to data held on local storage. Examples of these workloads include transactional databases such as MySQL, Oracle DB, and Microsoft SQL Server, as well as NoSQL databases including MongoDB, Couchbase, Aerospike, and Redis. Additionally, workloads that benefit from very high compute performance per TB of storage (for example, data analytics and search engines) are also an ideal target for these instance types, which offer up to 30 TB of AWS Nitro SSD storage.
Deploying AWS compute and storage services within telecommunications providers’ data centers, at the edge of the 5G networks, opens up interesting new possibilities for applications requiring end-to-end low latency (for example, delivery of high-resolution and high-fidelity live video streaming, and improved augmented/virtual reality (AR/VR) experiences). The first AWS Wavelength deployments started in the US in 2020, and have expanded to additional countries since. This week we announced the opening of the first Canadian AWS Wavelength zone, in Toronto.
Other AWS News
Some other launches and news items you may have missed:
Amazon Relational Database Service (RDS) had a busy week. I don’t have room to list them all, so below is just a subset of updates!
- The addition of IPv6 support enables customers to simplify their networking stack. The increase in address space offered by IPv6 removes the need to manage overlapping address spaces in your Amazon Virtual Private Cloud (VPC)s. IPv6 addressing can be enabled on both new and existing RDS instances.
- Customers in the Asia Pacific (Sydney) and Asia Pacific (Singapore) Regions now have the option to use Multi-AZ deployments to provide enhanced availability and durability for Amazon RDS DB instances, offering one primary and two readable standby database instances spanning three Availability Zones (AZs). These deployments benefit from up to 2x faster transaction commit latency, and automated fail overs, typically under 35 seconds.
- Amazon RDS PostgreSQL users can now choose from General-Purpose M6i and Memory-Optimized R6i instance types. Both of these sixth-generation instance types are AWS Nitro System-based, delivering practically all of the compute and memory resources of the host hardware to your instances.
- Applications using RDS Data API can now elect to receive SQL results as a simplified JSON string, making it easier to deserialize results to an object. Previously, the API returned a JSON string as an array of data type and value pairs, which required developers to write custom code to parse the response and extract the values, so as to translate the JSON string into an object. Applications that use the API to receive the previous JSON format are still supported and will continue to work unchanged.
Applications using Amazon Interactive Video Service (IVS), offering low-latency interactive video experiences, can now add a livestream chat feature, complete with built-in moderation, to help foster community participation in livestreams using Q&A discussions. The new chat support provides chat room resource management and a messaging API for sending, receiving, and moderating chat messages.
Amazon Polly now offers a new Neural Text-to-Speech (TTS) voice, Vitória, for Brazilian Portuguese. The original Vitória voice, dating back to 2016, used standard technology. The new voice offers a more natural-sounding rhythm, intonation, and sound articulation. In addition to Vitória, Polly also offers a second Brazilian Portuguese neural voice, Camila.
Finally, if you’re a .NET developer who’s modernizing .NET Framework applications to run in the cloud, then the announcement that the open-source CoreWCF project has reached its 1.0 release milestone may be of interest. AWS is a major contributor to the project, a port of Windows Communication Foundation (WCF), to run on modern cross-platform .NET versions (.NET Core 3.1, or .NET 5 or higher). This project benefits all .NET developers working on WCF applications, not just those on AWS. You can read more about the project in my blog post from last year, where I spoke with one of the contributing AWS developers. Congratulations to all concerned on reaching the 1.0 milestone!
For a full list of AWS announcements, be sure to keep an eye on the What’s New at AWS page.
Upcoming AWS Events
As I mentioned earlier, the AWS Summits are in full flow, with some some virtual and in-person events in the very near future you may want to check out:
- May 10–11, AWS Summit Korea (virtual)
- May 11, AWS Summit Stockholm (in-person)
- May 11–12, AWS Summit Berlin (in-person)
- May 18, AWS Summit Tel Aviv (in-person)
I’m also happy to share that I’ll be joining the AWS on Air crew at AWS Summit Washington, DC. This in-person event is coming up May 23–25. Be sure to tune in to the livestream for all the latest news from the event, and if you’re there in person feel free to come say hi!
Registration is also now open for re:MARS, our conference for topics related to machine learning, automation, robotics, and space. The conference will be in-person in Las Vegas, June 21–24.
That’s all the news I have room for this week — check back next Monday for another week in review!
Пролетарии от всички страни, разединявайте се!
Post Syndicated from original https://bivol.bg/%D0%BF%D1%80%D0%BE%D0%BB%D0%B5%D1%82%D0%B0%D1%80%D0%B8%D0%B8-%D0%BE%D1%82-%D0%B2%D1%81%D0%B8%D1%87%D0%BA%D0%B8-%D1%81%D1%82%D1%80%D0%B0%D0%BD%D0%B8-%D1%80%D0%B0%D0%B7%D0%B5%D0%B4%D0%B8%D0%BD%D1%8F.html
понеделник 2 май 2022

Дайте да го караме в прав текст. Всички сволочи в България, а и не само, са се обострили мощно. Когато нямаш качества, а само използваш, крадеш „в полза на народа“,…
Being friendly: Strategies for friendly fork management
Post Syndicated from Lessley Dennington original https://github.blog/2022-05-02-friend-zone-strategies-friendly-fork-management/
This is the second and final post in a series describing friendly forks and alternative strategies for managing them. Make sure to check out Being friendly: friendly forks 101 for general information on friendly forks and background on the three forks on which we center this post’s discussion.
In the first post in this series, we discussed what friendly forks are and learned about three GitHub-managed friendly forks of git/git, git-for-windows/git, microsoft/git, and github/git. In this post, we deep dive into the management strategies we employ for each of these forks and provide scenarios to help you select the appropriate management strategy for your own friendly fork.
 The importance of friendly fork management
The importance of friendly fork management
 The importance of friendly fork management
The importance of friendly fork managementWhile the basics of friendly forks could make for mildly interesting cocktail party conversation  , it takes a deeper understanding to successfully manage a fork once you have it. Management (or lack thereof) can make or break friendly forks for the following reasons:
, it takes a deeper understanding to successfully manage a fork once you have it. Management (or lack thereof) can make or break friendly forks for the following reasons:
- Contributions taken by the upstream project are also generally valuable to the fork.
- The number of changes to the upstream project since the last merge is correlated with the difficulty of merging those changes into the fork.
- When security patches are pushed upstream, it is critical to be able to easily apply them (without other conflicts getting in the way).
Although there is no one-size-fits-all approach to friendly fork management, our goal for the remainder of this post is to provide a solid starting point for your management journey that will help your friendly fork remain securely in the friend zone.
Our management strategies
 Our management strategies
Our management strategiesWe employ a different management strategy for each of the forks discussed in the previous post based on that fork’s unique needs. These strategies are illustrated in the graphic below.
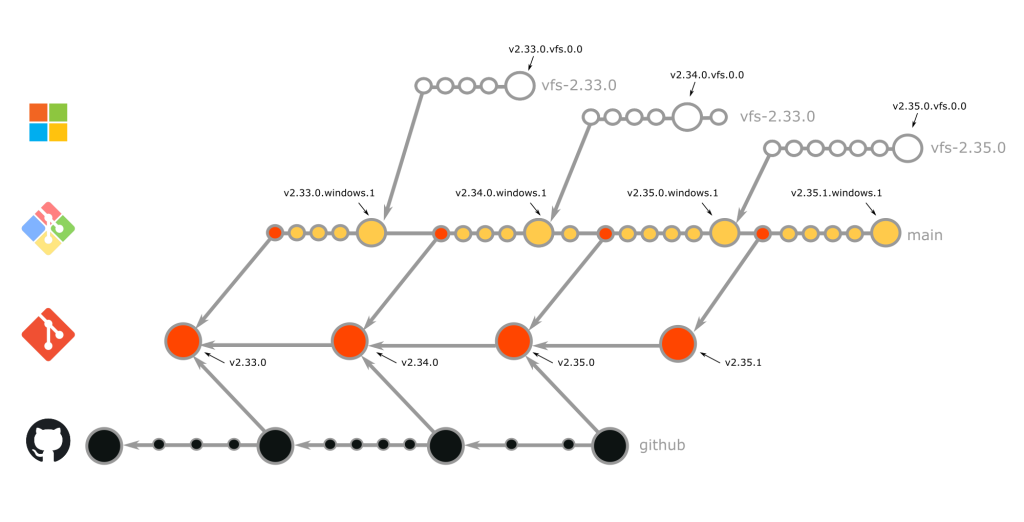
If the above image makes you feel slightly dizzy, don’t worry! We know it’s a lot, so we’re going to break it down into detailed descriptions of how each fork works. Take a deep breath, and prepare to dive in.
git-for-windows/git
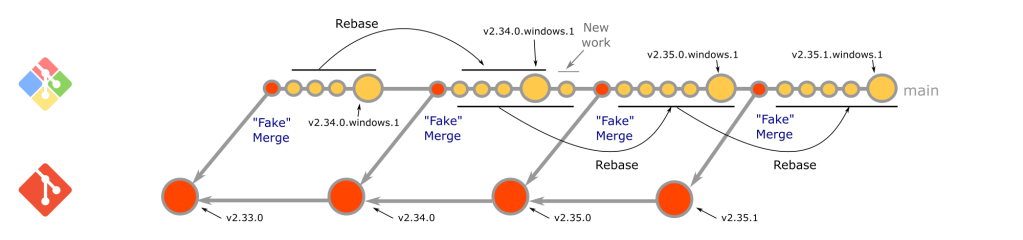
Git for Windows uses a custom merging rebase strategy to take changes from upstream. A merging rebase is just what it sounds like-a combination of a merge and a rebase. Merging rebases are executed at a predictable cadence that follows the git/git release cycle.
When it is time for a new release, git/git creates a series of release candidate tags (typically rc0, rc1, rc2, and final) on its default branch. As soon as each new candidate is released, we execute a merging rebase of the main branch on top of it. The merge portion comes first, with this command:
$ git merge -s ours -m "Start the merging-rebase to <version>" HEAD@{1}
This creates what we call a “fake merge” since it uses the “ours” strategy to discard all the changes from main. While this may seem odd, it actually provides the benefits of a clean slate for rebasing and the ability to fast forward from previous states of the branch.
After the merge is complete, the rebase commences. This portion of the process helps us resolve merge conflicts that occur when upstream changes conflict with changes that have been made in git-for-windows/git. One type of conflict in particular is worth discussing in more depth: commits that have been added to git-for-windows/git and subsequently upstreamed.
When these commits are submitted upstream, the community supporting git/git usually requests changes before they are accepted. Additionally, since git/git only accepts patches sent via mailing list (instead of pull requests), commit IDs inevitably change when applied upstream. This means there will be conflicts when git-for-windows/git is rebased on top of a new release. Running the following command helps us identify commits that have been upstreamed when we encounter conflicts:
$ git range-diff --left-only <commit>^! <commit>..<upstream-branch>
This command compares the differences between the below ranges of commits, dropping any that are not in the first specified range:
- From the commit before the commit you are checking to the commit you are checking (this will only contain the commit you are checking).
- The upstream commits that are not in the commit history of
<commit>.
If there is a matching commit in upstream, it will be shown in the command’s output. In this case, we use git rebase --skip to bypass the commit (and implicitly accept the upstream version).
Because git-for-windows/git begins its merging rebase immediately after the creation of each release candidate, we classify it as proactive-it ensures all new git/git features are integrated and released as soon as possible. The merging rebase is generally executed for each release candidate by one developer, but is reviewed by multiple other developers with the help of range-diff comparisons. You can find an example of such a review here. When complete, the changes are pushed directly to the main branch, and a new release is created.
microsoft/git
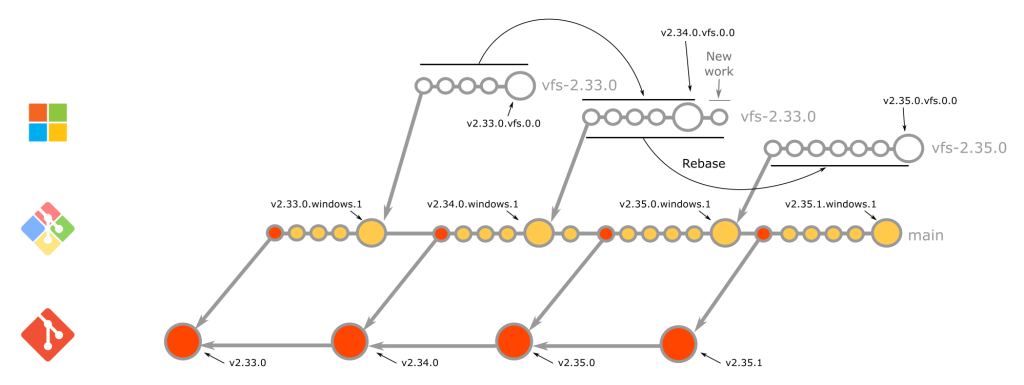
Like git-for-windows/git, microsoft/git is proactive, executing rebases immediately following the creation of each new git/git release candidate. It also uses the same strategies for identifying commits that have made it upstream. However, there are a few key differences between the git-for-windows/git approach and the microsoft/git approach. These are:
- Since
microsoft/gitis a fork ofgit-for-windows/git, it does not take commits directly fromgit/git. Instead, we wait for thegit-for-windows/gitmerging rebase to complete for each candidate then rebase on top of the resulting tag. - Instead of repeatedly rebasing a designated
mainbranch, we cut a brand new branch for each version with the naming schemevfs-2.X.Y(see the current default as an example). This branch is based off the initialgit-for-windows/gitrelease candidate tag and is updated with the rebase for each new release candidate. We based this strategy on release branches in Azure DevOps to make hotfixing easier and to clarify which commits are released with each new version.
Once the rebases are complete, we designate vfs-2.X.Y, as the new default branch, and create a new release.
github/git
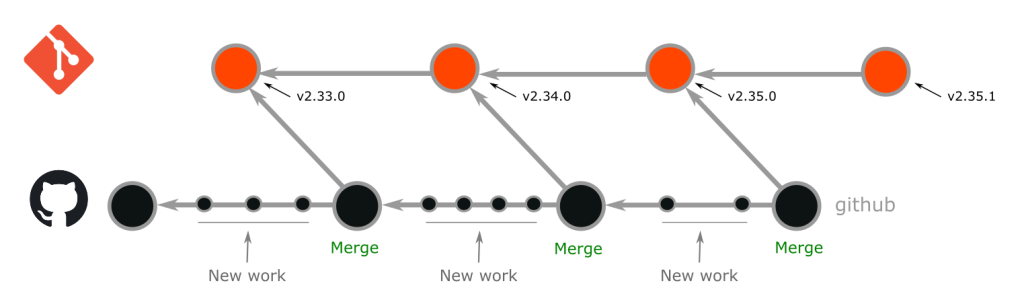
github/git integrates new git/git releases using a traditional merge strategy. It is cautious in its cadence for taking releases; for this fork, we prefer to allow new features to “simmer” for some time before integration. This means that github/git is typically one or two versions behind the latest release of git/git.
To ensure merges are high-quality and accurate, the merge of a new git/git version is carried out by at least two developers in parallel. For commits that began in github/git and subsequently made it upstream, we generally accept the upstream version when resolving resulting conflicts. Occasionally, however, there are reasons to take the github/git version (or, some parts of both versions). It is up to the developers executing the merge to decide the correct strategy for a particular commit. When each merge is complete, the trees at the tip of each merge are compared, and the different approaches to conflict resolution are reviewed. The outcome of this review is merged and deployed as a new release.
Note that there are tradeoffs to the decision to use a traditional merge strategy to manage this fork. Merging is more straightforward than rebasing or rebase merging. However, merges in github/git can become somewhat tricky when it has drifted far from upstream or when a sweeping change in upstream affects many parts of its custom code. Additionally, this strategy requires all commits to be preserved (as opposed to git-for-windows/git and microsoft/git, which use the autosquash feature of the rebase command to remove squash and fixup commits), which means more commits are involved in github/git merges.
Comparison
Below is a side-by-side summary of the key similarities and differences in the management strategies discussed above.
| Fork | Management Strategy | # of developers executing | Proactive or cautious | Long-running main branch | Integrates release candidates |
|---|---|---|---|---|---|
| git-for-windows/git | merging rebase | 1 | Proactive | Yes | Yes |
| microsoft/git | merging rebase | 1 | Proactive | No | Yes |
| github/git | merge | >=2 | Cautious | Yes | No |
As shown in the table, git-for-windows/git and microsoft/git have a lot in common. They are both proactive, executed by one developer, and use a form of rebase to integrate new releases (and release candidates). github/git is a bit different in its choice of a merge management strategy, the number of developers that simultaneously execute this strategy, and its cautious approach to integrating new releases (and in that release candidates are not considered).
As lovely as the above table is, you may still be scratching your head, wondering which strategy is right for you or your organization. Never fear! Our final section provides a series of scenarios with the goal of making this decision easier for you.
Finding your perfect match
 Finding your perfect match
Finding your perfect matchWell done! You’ve successfully made it through our deep dive into three alternatives for friendly fork management. 
However, now comes the really important part! It’s time to take a good look at each of the above strategies to understand which one is the best fit for you. We’ve organized this section as a series of scenarios to help you frame the above in the context of your own needs. Keep reading if you’re ready to choose your own friendly fork adventure!
Scenario 1: You have many contributors working simultaneously.
Constantly creating new default branches can leave developers with open pull requests in a bad state; obviously, this is particularly problematic when there’s a healthy amount of active development in your repository. Consider a merge or merging rebase strategy to avoid changing default branches and requiring your developers to constantly rebase.
Scenario 2: You need to support multiple versions with security releases or other bug fixes.
Consider the rebase model to have an easy story for cherry-picking fixes to supported versions.
Note: it is also possible to cherry-pick features from upstream with a merge-based workflow. However, if you later merge the commits containing the cherry-picked features, you may have to resolve some trivial conflicts depending on your merge strategy.
Scenario 3: You don’t (or do!) want to take new features immediately.
You can apply a cautious or proactive approach to any of the above strategies. Work with your team/management to find a cadence everyone is comfortable with and stick to it.
Scenario 4: You’re new to the fork game and want to keep it simple.
If this is your (or, your team’s) first time managing a fork and/or you’re just learning your way around Git, the merge strategy may be the most straightforward place for you to start.
Still not sure which strategy to use? Consider getting in touch with the maintainers of one of the friendly forks listed above (for example, via the appropriate mailing list(s) or a GitHub discussion) to get input from the experts!
Wrapping up
 Wrapping up
Wrapping upA friendly fork can help accelerate development and increase developer productivity and satisfaction. Additionally, managing a friendly fork carefully to stay in the friend zone can lead to successful collaboration between different communities and improved project quality for all parties involved. We hope this series has helped you understand whether a friendly fork is right for you or your organization and, if so, empowered you to create and begin managing your friendly fork successfully.
Highlights: Dr. Jane Goodall | Reasons for Hope | Talks at Google
Post Syndicated from Talks at Google original https://www.youtube.com/watch?v=achBGygj1-c
Cloud-Native Application Protection (CNAPP): What’s Behind the Hype?
Post Syndicated from Jesse Mack original https://blog.rapid7.com/2022/05/02/cloud-native-application-protection-cnapp-whats-behind-the-hype/

There’s no shortage of acronyms when it comes to security product categories. DAST, EDR, CWPP — it sometimes feels like we’re awash in a sea of letters, and that can be a little dizzying. Every once in a while, though, a new term pops up that cuts through the noise, thanks to a combination of catchiness and excitement about that product category’s potential to solve the big problems security teams face. (Think of XDR, for a recent example.)
Cloud-native application protection platform, or CNAPP, is one of those standout terms that has the potential to solve significant problems in cloud security by consolidating a list of other “C” letter acronyms. Gartner introduced CNAPP as one of its cloud security categories in 2021, and the term quickly began to make headlines. But what’s the reality behind the hype? Is CNAPP an all-in-one answer to building secure apps in a cloud-first ecosystem, or is it part of a larger story? Let’s take a closer look.
New needs of cloud-native teams
CNAPP is a cloud security archetype that takes an integrated, lifecycle approach, protecting both hosts and workloads for truly cloud-native application development environments. These environments have their own unique demands and challenges, so it should come as little surprise that new product categories have arisen to address those concerns.
Cloud infrastructures are inherently complex — that makes it tougher to monitor these environments, potentially opening the door to security gaps. If you’re building applications within a cloud platform, the challenge multiplies: You need next-level visibility to ensure your environment and the applications you’re building in it are secure from the ground up.
A few trends have emerged within teams building cloud-native applications to address their unique needs.
DevSecOps: A natural extension of the DevOps model, DevSecOps brings security into the fold with development and operations as an integral part of the same shared lifecycle. It makes security everyone’s business, not just the siloed responsibility of a team of infosec specialists.
Shift left: Tied into the DevSecOps model is the imperative to shift security left — i.e. earlier in the development cycle — making it a fundamental aspect of building applications rather than an afterthought. The “bake it in, don’t bolt it on” adage has become almost cliché in security circles, but shifting left is in some ways a more mature — and arguably more radical — version of this concept. It changes security from something you do to an application to part of what the application is. Security becomes part of the fundamental conception and design of a web app.
All of that said, the real challenge here comes down to security teams trying to monitor and manage large-scale, complex cloud environments – not to mention trying to generate buy-in from other teams and get them to collaborate on security protocols that may occasionally slow them down.
How CNAPP hopes to help
To bring DevSecOps and shift-left practices to life, teams need tools that support the necessary levels of visibility and flexibility that underlie these goals. That brings us to where CNAPP fits into this picture.
“Optimal security of cloud-native applications requires an integrated approach that starts in development and extends to runtime protection,” Gartner writes in their report introducing CNAPP, according to Forbes. “The unique characteristics of cloud-native applications makes them impossible to secure without a complex set of overlapping tools spanning development and production.”
Forbes goes on to outline the 5 core components that Gartner uses in its definition of CNAPP:
• Infrastructure as code (IaC) scanning: Because infrastructure is managed and provisioned as code in many cloud environments, this code must be continuously scanned for vulnerabilities.
• Container scanning: The cloud has made containers an integral part of application development and deployment — these must also be scanned for security threats.
• Cloud workload protection (CWPP): This type of security solution focuses on protecting workloads in cloud data center architectures.
• Cloud infrastructure entitlement management (CIEM): This cloud security category streamlines identity and access management (IAM) by providing least-privileged access and governance controls for distributed cloud environments.
• Cloud security posture management (CSPM): CSPM capabilities continuously manage cloud security risk, with automated detection, logging, and reporting to aid governance and compliance.
A holistic approach to cloud-native security
You might have noticed some of the components of CNAPP are themselves cloud security categories as defined by Gartner. How are they different from CNAPP? Do you need all of them individually, or are they available in a single package? What gives?
While CNAPP is meant to be a product category, right now the broad set of capabilities in Gartner’s definition describes an ideal future state that remains rare in the industry as a single solution. The fact remains there aren’t many vendors out there that have all these components, even across multiple product sets – let alone the ability to fit them into a single solution.
That said, vendors and practitioners can start working together now to bring that vision to life. While there are and will continue to be products that label or identify themselves as a CNAPP, what’s really needed is a comprehensive approach to cloud security – both from the technology provided by vendors and the strategy executed by practitioners – that simplifies the process of monitoring and remediating risks from end to end within vast, complex cloud environments.
The cloud is now dominant, and infrastructure is increasingly becoming code — that means scanning for vulnerabilities within infrastructure and in applications have begun to look more alike than ever. Just like DevSecOps brings development, security, and operations together into (ideally) a harmonious unit, application security testing and cloud security monitoring are coequal, integral parts of a truly cloud-native security platform.
The real excitement around CNAPP is that by bringing once-disparate cloud security concepts together, it shines a light on what today’s organizations really need: a full-access path to a secure cloud ecosystem, with all the necessary speed of innovation and deployment and as little risk as possible.
Additional reading:
- Rapid7 Named a Visionary in 2022 Magic Quadrant™ for Application Security Testing Second Year in a Row
- 2022 Cloud Misconfigurations Report: A Quick Look at the Latest Cloud Security Breaches and Attack Trends
- InsightCloudSec Supports the Recently Updated NSA/CISA Kubernetes Hardening Guide
- Let’s Dance: InsightAppSec and tCell Bring New DevSecOps Improvements in Q1
[$] NUMA rebalancing on tiered-memory systems
Post Syndicated from original https://lwn.net/Articles/893024/
The classic NUMA architecture is built around nodes, each of which contains
a set of CPUs and some local memory; all nodes are more-or-less equal.
Recently, though, “tiered-memory” NUMA systems have begun to appear; these
include CPU-less nodes that contain persistent memory rather than (faster,
but more expensive) DRAM. One possible use for that
memory is to hold less-frequently-used pages rather than forcing them out
to a backing-store device. There is an interesting problem that emerges
from this use case, though: how does the kernel manage the movement of
pages between faster and slower memory? Several recent patch sets have
taken differing approaches to the problem of rebalancing memory on these
systems.
Hughes: fwupd 1.8.0 and 50 million updates
Post Syndicated from original https://lwn.net/Articles/893452/
Richard Hughes announces
the fwupd 1.8.0 release and notes that the associated Linux Vendor Firmware Service has now shipped
a minimum of 50 million firmware updates.
Just 7 years ago Christian asked me to “make firmware updates work
on Linux” and now we have a thriving client project that respects
both your freedom and your privacy, and a thriving ecosystem of
hardware vendors who consider Linux users first class citizens. Of
course, there are vendors who are not shipping updates for popular
hardware, but they’re now in the minority — and every month we have
two or three new vendor account requests.
Smithy Server and Client Generator for TypeScript (Developer Preview)
Post Syndicated from Adam Thomas original https://aws.amazon.com/blogs/devops/smithy-server-and-client-generator-for-typescript/
We’re excited to announce the Developer Preview of Smithy’s server and client generators for TypeScript. This enables developers to write concise, type-safe code in the same model-first manner that AWS has used to develop its services. Smithy is AWS’s open-source Interface Definition Language (IDL) for web services. AWS uses Smithy and its internal predecessor to model services, generate server scaffolding, and generate rich clients in multiple languages, such as the AWS SDKs.
If you’re unfamiliar with Smithy, check out the Smithy website and watch an introductory talk from Michael Dowling, Smithy’s Principal Engineer.
This post will demonstrate how you can write a simple Smithy model, write a service that implements the model, deploy it to AWS Lambda, and call it using a generated client.
What can the server generator do for me?
Using Smithy and its server generator unlocks model-first development. Model-first development puts your customers first. This forces you to define your interface first rather than let your API to become implicitly defined by your implementation choices.
Smithy’s server generator for TypeScript enables development at a higher level of abstraction. By making serialization, deserialization, and routing an implementation detail in generated code, service developers can focus on writing code against modeled types, rather than against raw HTTP requests. Your business logic and unit tests will be cleaner and more readable, and the way that your messages are represented on the wire is defined explicitly by a protocol, not implicitly by your JSON parser.
The server generator also lets you leverage TypeScript’s type safety. Not only is the business logic of your service written against strongly typed interfaces, but also you can reference your service’s types in your AWS Cloud Development Kit (AWS CDK) definition. This makes sure that your stack will fail at build time rather than deployment time if it’s out of sync with your model.
Finally, using Smithy for service generation lets you ship clients in Smithy’s growing portfolio of generated clients. We’re unveiling a developer preview of the client generator for TypeScript today as well, and we’ll continue to unveil more implementations in the future.
The architecture of a Smithy service
A Smithy service looks much like any other web service running on Lambda behind Amazon API Gateway. The difference lies in the code itself. Where a standard service might use a generic deserializer to parse an incoming request and bind it to an object, a Smithy service relies on code generation for deserialization, serialization, validation, and the object model itself. These functions are generated into a standalone library known as a Smithy server SDK. Using a server SDK with one of AWS’s prepackaged request converters, service developers can focus on their business logic, rather than the undifferentiated heavy lifting of parsing and generating HTTP requests and responses.
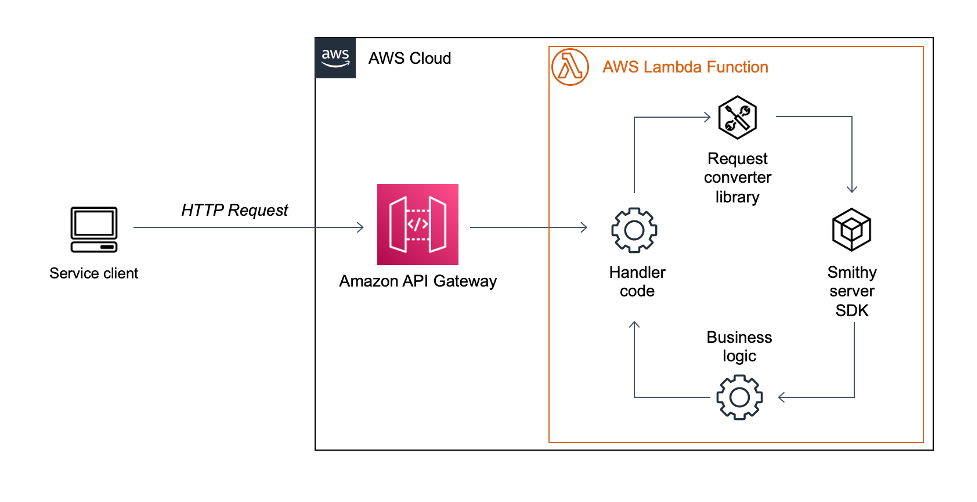
Walkthrough
This post will walk you through the process of building and using a Smithy service, from modeling to deployment.
By the end, you should be able to:
- Model a simple REST service in Smithy
- Generate a Smithy server SDK for TypeScript
- Implement a service in Lambda using the generated server SDK
- Deploy the service to AWS using the AWS CDK
- Generate a client SDK, and use it to call the deployed service
The complete example described in this post can be found here.
Prerequisites
For this walkthrough, you should have the following prerequisites:
- An AWS account
- JDK >= 8, Node.js >= 14, Yarn >= 2, and Git installed
- Your workstation configured to use your AWS account with the CDK
Checking out the sample repository
Create a new repository from the template repository here.
To clone the application in your browser
- Open https://github.com/aws-samples/smithy-server-generator-typescript-sample in your browser
- Select “Use this template” in the top right-hand corner
- Fill out the form, and select “Create repository from template”
- Clone your new repository from GitHub by following the instructions in the “Code” dropdown
Exploring and setting up the sample application
The sample application is split into three separate submodules:
- model – contains the Smithy model that defines the service
- Server – contains the code generation setup, application logic, and CDK stack for the service
- typescript-client – contains the code generation setup for a rich client generated in TypeScript
To bootstrap the sample application and run the initial build
- Open a terminal and navigate to the root of the sample application
- Run the following command:
./gradlew build && yarn install - Wait until the build finishes successfully
Modeling a service using Smithy
In an IDE of your choice, open the file at model/src/main/smithy/main.smithy. This file defines the interface for the sample web service, a service that can echo strings back to the caller, as well as provide the string length.
The service definition forms the root of a Smithy model. It defines the operations that are available to clients, as well as common errors that are thrown by all of the operations in a service.
@sigv4(name: "execute-api")
@restJson1
service StringWizard {
version: "2018-05-10",
operations: [Echo, Length],
errors: [ValidationException],
}This service uses the @sigv4 trait to indicate that calls must be signed with AWS Signature V4. In the sample application, API Gateway’s Identity and Access Management (IAM) Authentication support provides this functionality.
@restJson1 indicates the protocol supported by this service. RestJson1 is Smithy’s built-in protocol for RESTful web services that use JSON for requests and responses.
This service advertises two operations: Echo and Length. Furthermore, it indicates that every operation on the service must be expected to throw ValidationException, if an invalid input is supplied.
Next, let’s look at the definition of the Length operation and its input type.
/// An operation that computes the length of a string
/// provided on the URI path
@readonly
@http(code: 200, method: "GET", uri: "/length/{string}",)
operation Length {
input: LengthInput,
output: LengthOutput,
errors: [PalindromeException],
}
@input
structure LengthInput {
@required
@httpLabel
string: String,
}This operation uses the @http trait to model how requests are processed with restJson1, including the method (GET) and how the URI is formed (using a label to bind the string field from LengthInput to a path segment). HTTP binding with Smithy can be explored in depth at Smithy’s documentation page.
Note that this operation can also throw a PalindromeException, which we’ll explore in more detail when we check out the business logic.
Updating the Smithy model to add additional constraints to the input
Smithy constraint traits are used to enable additional validation for input types. Server SDKs automatically perform validation based on the Smithy constraints in the model. Let’s add a new constraint to the input for the Length operation. Moreover, let’s make sure that only alphanumeric characters can be passed in by the caller.
- Open model/src/main/smithy/main.smithy in an editor
- Add a @pattern constraint to the string member of Length input. It should look like this:
structure LengthInput { @required @httpLabel @pattern(“^[a-zA-Z0-9]$”) string: String, } - Open a terminal, and navigate to the root of the sample application
- Run the following command:
yarn build - Wait for the build to finish successfully
Using the Smithy Server Generator for TypeScript
The key component of a Smithy web service is its code generator, which translates the Smithy model into actual code. You’ve already run the code generator – it runs every time that you build the sample application.
The codegen directory inside of the server submodule is where the Smithy Server Generator for TypeScript is configured and run. The server generator uses Smithy Build to build, and it’s configured by smithy-build.json.
{
"version" : "1.0",
"outputDirectory" : "build/output",
"projections" : {
"ts-server" : {
"plugins": {
"typescript-ssdk-codegen" : {
"package" : "@smithy-demo/string-wizard-service-ssdk",
"packageVersion": "0.0.1"
}
}
},
"apigateway" : {
"plugins" : {
"openapi": {
"service": "software.amazon.smithy.demo#StringWizard",
"protocol": "aws.protocols#restJson1",
"apiGatewayType" : "REST"
}
}
}
}
}This smithy-build configures two projections. The ts-server projection generates the server SDK by invoking the typescript-ssdk-codegen plugin. The package and packageVersion arguments are used to generate an npm package that you can add as a dependency in your server code.
The OpenAPI projection configures Smithy’s OpenAPI converter to generate a file that can be imported into API Gateway to host this service. It uses Smithy’s ability to extend models via the imports keyword to extend the base model with an additional API Gateway configuration. The generated OpenAPI specification is used by the CDK stack, which we’ll explore later.
If you open package.json in the server submodule, then you’ll notice this line in the dependencies section:
"@smithy-demo/string-wizard-service-ssdk": "workspace:server/codegen/build/smithyprojections/server-codegen/ts-server/typescript-ssdk-codegen"
The key, @smithy-demo/string-wizard-service-ssdk, matches the package key in the smithy-build.json file. The value uses Yarn’s workspaces feature to set up a local dependency on the generated server SDK. This lets you use the server SDK as a standalone npm dependency without publishing it to a repository. Since we bundle the server application into a zip file before uploading it to Lambda, you can treat the server SDK as an implementation detail that isn’t published externally.
We won’t get into the details here, but you can see the specifics of how the code generator is invoked by looking at the regenerate:ssdk script in the server’s package.json, as well as the build.gradle file in the server’s codegen directory.
Implementing an operation using a server SDK
The server generator takes care of the undifferentiated heavy lifting of writing a Smithy service. However, there are still two tasks left for the service developer: writing the Lambda entrypoint, and implementing the operation’s business logic.
First, let’s look at the entrypoint for the Length operation. Open server/src/length_handler.ts in an editor. You should see the following content:
import { getLengthHandler } from "@smithy-demo/string-wizard-service-ssdk";
import { APIGatewayProxyHandler } from "aws-lambda";
import { LengthOperation } from "./length";
import { getApiGatewayHandler } from "./apigateway";
// This is the entry point for the Lambda Function that services the LengthOperation
export const lambdaHandler: APIGatewayProxyHandler = getApiGatewayHandler(getLengthHandler(LengthOperation));If you’ve written a Lambda entry-point before, then exporting a function of type APIGatewayProxyHandler will be familiar to you. However, there are a few new pieces here. First, we have a function from the server SDK, called getLengthHandler, that takes a Smithy Operation type and returns a ServiceHandler. Operation is the interface that the server SDK uses to encapsulate business logic. The core task of implementing a Smithy service is to implement Operations. ServiceHandler is the interface that encapsulates the generated logic of a server SDK. It’s the black box that handles serialization, deserialization, error handling, validation, and routing.
The getApiGatewayHandler function simply invokes the request and response conversion logic, and then builds a custom context for the operation. We won’t go into their details here.
Next, let’s explore the operation implementation. Open server/src/length.ts in an editor. You should see the following content:
import { Operation } from "@aws-smithy/server-common";
import {
LengthServerInput,
LengthServerOutput,
PalindromeException,
} from "@smithy-demo/string-wizard-service-ssdk";
import { HandlerContext } from "./apigateway";
import { reverse } from "./util";
// This is the implementation of business logic of the LengthOperation
export const LengthOperation: Operation<LengthServerInput, LengthServerOutput, HandlerContext> = async (
input,
context
) => {
console.log(`Received Length operation from: ${context.user}`);
if (input.string != undefined && input.string === reverse(input.string)) {
throw new PalindromeException({ message: "Cannot handle palindrome" });
}
return {
length: input.string?.length,
};
};Let’s look at this implementation piece-by-piece. First, the function type Operation<LengthServerInput, LengthServerOutput, HandlerContext> provides the type-safe interface for our business logic. LengthServerInput and LengthServerOutput are the code generated types that correspond to the input and output types for the Length operation in our Smithy model. If we use the wrong type arguments for the Operation, then it will fail type checks against the getLengthHandler function in the entry-point. If we try to access the incorrect properties on the input, then we’ll also see type checker failures. This is one of the core tenets of the Smithy Server Generator for TypeScript: writing a web service should be as strongly typed as writing anything else.
Next, let’s look at the section that validates that the input isn’t a palindrome:
if (input.string != undefined && input.string === reverse(input.string)) {
throw new PalindromeException({ message: "Cannot handle palindrome" });
}Although the server SDK can validate the input against Smithy’s constraint traits, there is no constraint trait for rejecting palindromes. Therefore, we must include this validation in our business logic. Our Smithy model includes a PalindromeException definition that includes a message member. This is generated as a standard subclass of Error with a constructor that takes in a message that your operation implementation can throw like any other error. This will be caught and properly rendered as a response by the server SDK.
Finally, there’s the return statement. Since the Smithy model defines LengthOutput as a structure containing an integer member called length, we return an object that has the same structural type here.
Note that this business logic doesn’t have to consider serialization, or the wire format of the request or response, let alone anything else related to HTTP or API Gateway. The unit tests in src/length/length.spec.ts reflect this. They’re the same standard unit tests as you would write against any other TypeScript class. The server SDK lets you write your business logic at a higher level of abstraction, thus simplifying your unit testing and letting your developers focus on their business logic rather than the messy details.
Deploying the sample application
The sample application utilizes the AWS CDK to deploy itself to your AWS account. Explore the CDK definition in server/lib/cdk-stack.ts. An in-depth exploration of the stack is out of the scope for this post, but it looks largely like any other AWS application that deploys TypeScript code to Lambda behind API Gateway.
The key difference is that the cdk stack can rely on a generated OpenAPI definition for the API Gateway resource. This makes sure that your deployed application always matches your Smithy model. Furthermore, it can use the server SDK’s generated types to make sure that every modeled operation has an implementation deployed to Lambda. This means that forgetting to wire up the implementation for a new operation becomes a compile-time failure, rather than a runtime one.
To deploy the sample application from the command line
-
- Open a terminal and navigate to the server directory of your sample application.
- Run the following command:
yarn cdk deploy - The cdk will display a list of security-sensitive resources that will be deployed to your account. These consist mostly of AWS Identity and Access Management (IAM) roles used by your Lambda functions for execution. Enter
yto continue deploying the application to your account. - When it has completed, the CDK will print your new application’s endpoint and the CloudFormation stack containing your application to the console. It will look something like the following:
Outputs: StringWizardService.StringWizardApiEndpoint59072E9B = https://RANDOMSTRING.execute-api.us-west-2.amazonaws.com/prod/ Stack ARN: arn:aws:cloudformation:us-west-2:YOURACCOUNTID:stack/StringWizardService/SOME-UUID - Log on to your AWS account in the AWS Management Console.
- Navigate to the Lambda console. You should see two new functions: one that starts with StringWizardService-EchoFunction, and one that starts with StringWizardService-EchoFunction. These are the implementations of your Smithy service’s operations.
- Navigate to the Amazon API Gateway console. You should see a new REST API named StringWizardAPI, with Resources
POST /echoandGET /length/{string}, corresponding to your Smithy model.
Calling the sample application with a generated client
The last piece of the Smithy puzzle is the strongly-typed generated client generated by the Smithy Client Generator for TypeScript. It’s located in the typescript-client folder, which has a codegen folder that uses SmithyBuild to generate a client in much the same manner as the server.
The sample application ships with a simple wrapper script for the length operation that uses the generated client to build a rudimentary CLI. Open the typescript-client/bin/length.ts file in your editor. The contents will look like the following:
#!/usr/bin/env node import {LengthCommand, StringWizardClient} from "@smithy-demo/string-client"; const client = new StringWizardClient({endpoint: process.argv[2]}); client.send(new LengthCommand({ string: process.argv[3] })).catch((err) => { console.log("Failed with error: " + err); process.exit(1); }).then((res) => { process.stderr.write(res.length?.toString() ?? "0"); });If you’ve used the AWS SDK for JavaScript v3, this will look familiar. This is because it’s generated using the Smithy Client Generator for TypeScript!
From the code, you can see that the CLI takes two positional arguments: the endpoint for the deployed application, and an input string. Let’s give it a spin.
To call the deployed application using the generated client
- Open a terminal and navigate to the typescript-client directory.
- Run the following command to build the client:
yarn build - Using the endpoint output by the CDK in the Deploying the sample application section above, run the following command:
yarn run str-length https://RANDOMSTRING.execute-api.us-west-2.amazonaws.com/prod/ foo - You should see an output of 3, the length of foo.
- Next, trigger anerror by calling your endpoint with a palindrome by running the following command:
yarn run str-length https://RANDOMSTRING.execute-api.us-west-2.amazonaws.com/prod/ kayak - You should see the following output:
Failed with error: PalindromeException: Cannot handle palindrome
Cleaning up
To avoid incurring future charges, delete the resources.
To delete the sample application using the CDK
- Open a terminal and navigate to the server directory.
- Run the following command:
yarn cdk destroy StringWizardService - Answer y to the prompt
Are you sure you want to delete: StringWizardService (y/n)? - Wait for the CDK to complete the deletion of your CloudFormation stack. You should see the following when it has completed:
✅ StringWizardService: destroyed
Conclusion
You have now used a Smithy model to define a service, explored how a generated server SDK can simplify your web service development, deployed the service to the AWS Cloud using the AWS CDK, and called the service using a strongly-typed generated client.
If you aren’t familiar with Smithy, but you want to learn more, then don’t forget to check out the documentation or the introductory video.
To learn more about the Smithy Server Generator for TypeScript, check out its documentation.
If you have feature requests, bug reports, feedback of any kind, or would like to contribute, head over to the GitHub repository.
Security updates for Monday
Post Syndicated from original https://lwn.net/Articles/893440/
Security updates have been issued by Debian (ffmpeg, ghostscript, libarchive, and tinyxml), Fedora (CuraEngine, epiphany, gzip, usd, vim, xen, and xz), Oracle (maven-shared-utils and qemu), Red Hat (gzip, python27-python and python27-python-pip, rh-maven36-maven-shared-utils, rh-python38-python, rh-python38-python-lxml, and rh-python38-python-pip, and zlib), Slackware (pidgin), SUSE (jasper, java-11-openjdk, libcaca, libslirp, mariadb, mutt, nodejs12, opera, and python-Twisted), and Ubuntu (libinput).
Cloudflare Relay Worker
Post Syndicated from Matt Boyle original https://blog.cloudflare.com/cloudflare-relay-worker/
Our Notification Center offers first class support for a variety of popular services (a list of which are available here). However, even with such extensive support, you may use a tool that isn’t on that list. In that case, it is possible to leverage Cloudflare Workers in combination with a generic webhook to deliver notifications to any service that accepts webhooks.
Today, we are excited to announce that we are open sourcing a Cloudflare Worker that will make it as easy as possible for you to transform our generic webhook response into any format you require. Here’s how to do it.
For this example, we are going to write a Cloudflare Worker that takes a generic webhook response, transforms it into the correct format and delivers it to Rocket Chat, a popular customer service messaging platform. When Cloudflare sends you a generic webhook, it will have the following schema, where “text” and “data” will vary depending on the alert that has fired:
{
"name": "Your custom webhook",
"text": "The alert text",
"data": {
"some": "further",
"info": [
"about",
"your",
"alert",
"in"
],
"json": "format"
},
"ts": 123456789
}Whereas Rocket Chat is looking for this format:
{
"text": "Example message",
"attachments": [
{
"title": "Rocket Chat",
"title_link": "https://rocket.chat",
"text": "Rocket.Chat, the best open source chat",
"image_url": "/images/integration-attachment-example.png",
"color": "#764FA5"
}
]
}Getting Started
Firstly, you’ll need to ensure you are ready to develop on the Cloudflare Workers platform. You can find more information on how to do that here. For the purpose of this example, we will assume you have a Cloudflare account and Wrangler, the Workers CLI, setup.
Next, let us see the steps to extend the notifications system in detail.
Step 1
Clone the webhook relay worker GitHub repository: git clone [email protected]:cloudflare/cf-webhook-relay.git
Step 2
Check the webhook payload format required by your communication tool. In this specific case, it would look like the Rocket Chat example payload shared above.
Step 3
Sign up for Rocket Chat and add a webhook integration to accept incoming webhook notifications.
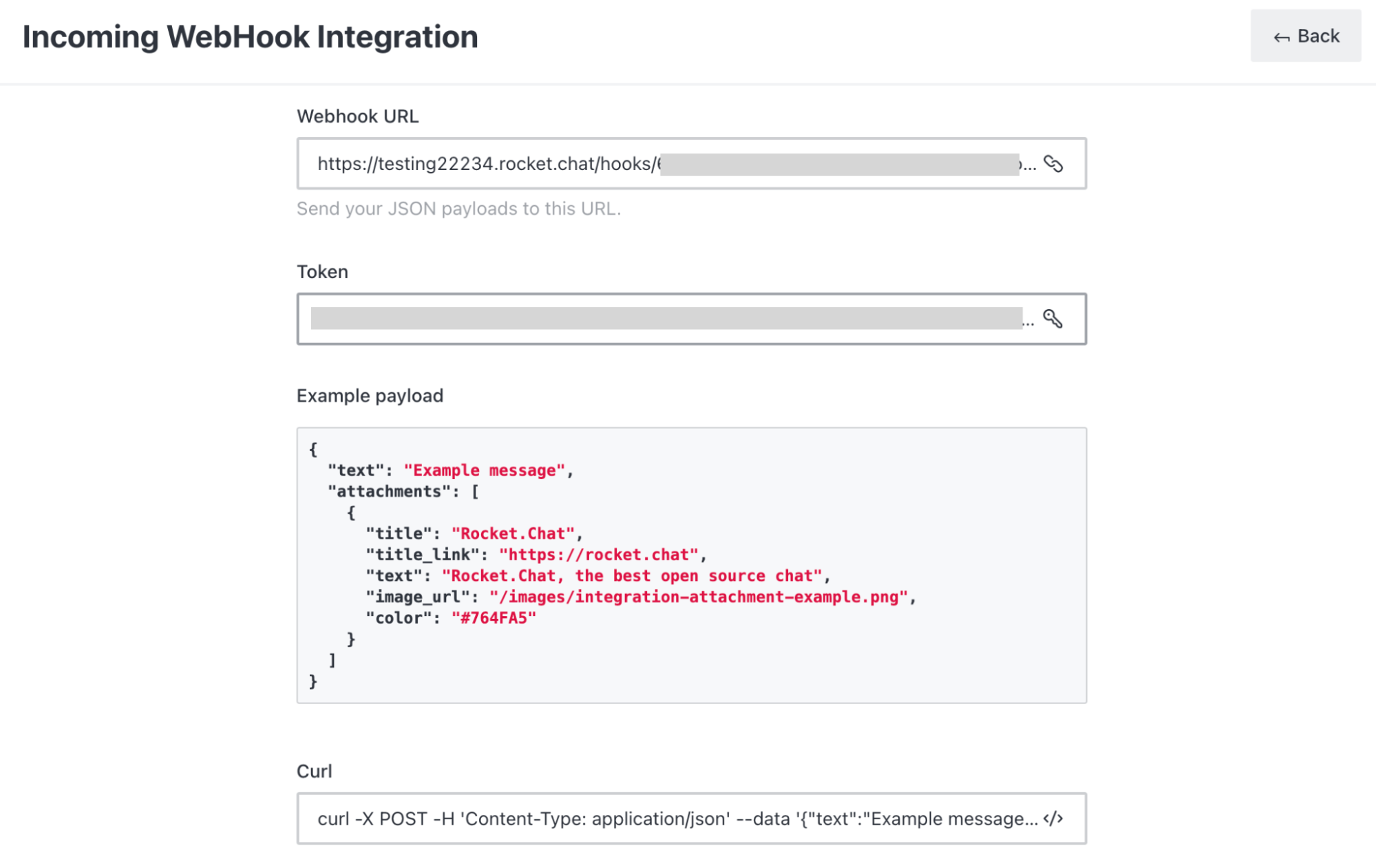
Step 4
Configure an encrypted wrangler secret for request authentication and the Rocket Chat URL for sending requests in your Worker: Environment variables · Cloudflare Workers docs (for this example, the secret is not encrypted.)
Step 5
Modify your worker to accept POST webhook requests with the secret configured as a query param for authentication.
if (headers.get("cf-webhook-auth") !== WEBHOOK_SECRET) {
return new Response(":(", {
headers: {'content-type': 'text/plain'},
status: 401
})
}Step 6
Convert the incoming request payload from the notification system (like in the example shared above) to the Rocket Chat format in the worker.
let incReq = await request.json()
let msg = incReq.text
let webhookName = incReq.name
let rocketBody = {
"text": webhookName,
"attachments": [
{
"title": "Cloudflare Webhook",
"text": msg,
"title_link": "https://cloudflare.com",
"color": "#764FA5"
}
]
}Step 7
Configure the Worker to send POST requests to the Rocket Chat webhook with the converted payload.
const rocketReq = {
headers: {
'content-type': 'application/json',
},
method: 'POST',
body: JSON.stringify(rocketBody),
}
const response = await fetch(
ROCKET_CHAT_URL,
rocketReq,
)
const res = await response.json()
console.log(res)
return new Response(":)", {
headers: {'content-type': 'text/plain'},
})Step 8
Set up deployment configuration in your wrangler.toml file and publish your Worker. You can now see the Worker in the Cloudflare dashboard.
Step 9
You can manage and monitor the Worker with a variety of available tools.
Step 10
Add the Worker URL as a generic webhook to the notification destinations in the Cloudflare dashboard: Configure webhooks · Cloudflare Fundamentals docs.
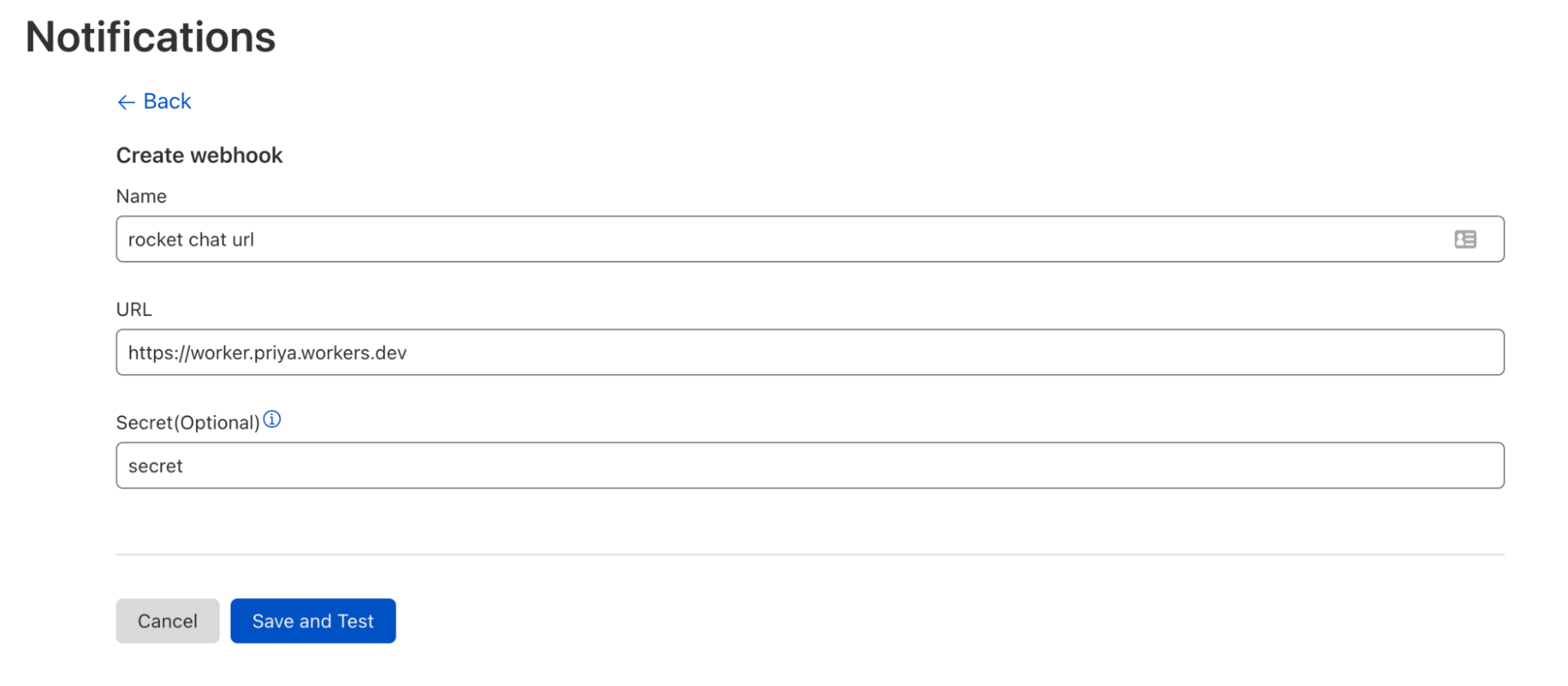
Step 11
Create a notification with the destination as the configured generic webhook: Create a Notification · Cloudflare Fundamentals docs.
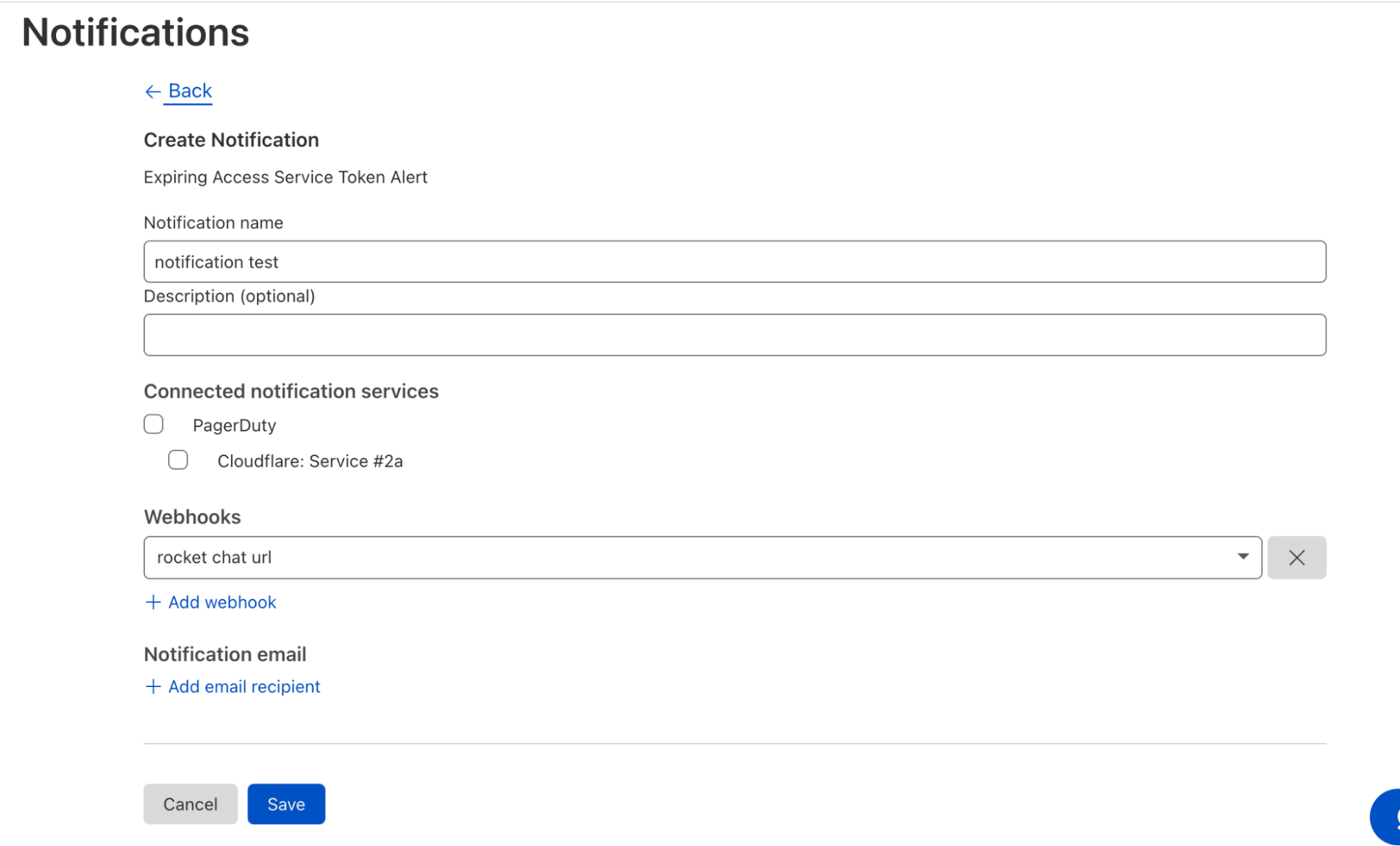
Step 12
Tada! With your Cloudflare Worker running, you can now receive all notifications to Rocket Chat. We can configure in the same way for any communication tool.

We know that a notification system is essential to proactively monitor any issues that may arise within a project. We are excited with this announcement to make notifications available to any communication service without having to worry too much about the system’s compatibility to them. We have lots of updates planned, like adding more alertable events to choose from and extending our support to a wide range of webhook services to receive them.
If you’re interested in building scalable services and solving interesting technical problems, we are hiring engineers on our team in Austin & Lisbon.
Two Teens, a Ham Radio, and Operation Deep Freeze
Post Syndicated from The History Guy: History Deserves to Be Remembered original https://www.youtube.com/watch?v=uaTm_LUifUI
Environmental Racism: Last Week Tonight with John Oliver (HBO)
Post Syndicated from LastWeekTonight original https://www.youtube.com/watch?v=-v0XiUQlRLw
2
Post Syndicated from original https://xkcd.com/2614/

DeVault: Announcing the Hare programming language
Post Syndicated from original https://lwn.net/Articles/893285/
Drew DeVault has announced
the existence of a new programming language called “Hare”.
Hare is a systems programming language designed to be simple,
stable, and robust. Hare uses a static type system, manual memory
management, and a minimal runtime. It is well-suited to writing
operating systems, system tools, compilers, networking software,
and other low-level, high performance tasks.
Willis: Engaging with the OSI Elections 2022.1
Post Syndicated from original https://lwn.net/Articles/893284/
Nathan Willis took
a long look at the Open Source Initiative’s 2022 board election and
wasn’t entirely pleased with what he saw.
So it’s a troubling ballot to look at. There’s an ostensibly
non-profit organization that’s an official OSI affiliate trying to
run its CEO as an individual candidate while also running a second
member (a board director) on the appropriate, affiliate ballot in
the same election. There’s also two financial sponsors running
candidates on the individual ballot, one of them (Red Hat) running
two candidates at the same time for the two open seats.
Kernel prepatch 5.18-rc5
Post Syndicated from original https://lwn.net/Articles/893283/
The 5.18-rc5 kernel prepatch is out for
testing. “So if rc4 last week was tiny and smaller than usual, it seems to have
been partly timing, and rc5 is now a bit larger than usual.
But only a very tiny bit larger – certainly not outrageously so, and
not something that worries me.”
Two stable kernel releases
Post Syndicated from original https://lwn.net/Articles/893263/
The 5.15.37 and
4.19.241
stable kernel updates have been released; each contains a relatively small
number of important fixes.
Chaos experiments on Amazon RDS using AWS Fault Injection Simulator
Post Syndicated from Anup Sivadas original https://aws.amazon.com/blogs/devops/chaos-experiments-on-amazon-rds-using-aws-fault-injection-simulator/
Performing controlled chaos experiments on your Amazon Relational Database Service (RDS) database instances and validating the application behavior is essential to making sure that your application stack is resilient. How does the application behave when there is a database failover? Will the connection pooling solution or tools being used gracefully connect after a database failover is successful? Will there be a cascading failure if the database node gets rebooted for a few seconds? These are some of the fundamental questions that you should consider when evaluating the resiliency of your database stack. Chaos engineering is a way to effectively answer these questions.
Traditionally, database failure conditions, such as a failover or a node reboot, are often triggered using a script or 3rd party tools. However, at scale, these external dependencies often become a bottleneck and are hard to maintain and manage. Scripts and 3rd party tools can fail when called, whereas a web service is highly available. The scripts and 3rd party tools also tend to require elevated permissions to work, which is a management overhead and insecure from a least privilege access model perspective. This is where AWS Fault Injection Simulator (FIS) comes to the rescue.
AWS Fault Injection Simulator (AWS FIS) is a fully managed service for running fault injection experiments on AWS that makes it easier to improve an application’s performance, observability, and resiliency. Fault injection experiments are used in chaos engineering, which is the practice of stressing an application in testing or production environments by creating disruptive events, such as a sudden increase in CPU or memory consumption, database failover and observing how the system responds, and implementing improvements.
We can define the key phases of chaos engineering as identifying the steady state of the workload, defining a hypothesis, running the experiment, verifying the experiment results and making necessary improvements based on the experiment results. These phases will confirm that you are injecting failures in a controlled environment through well-planned experiments in order to build confidence in the workloads and tools we are using to withstand turbulent conditions.
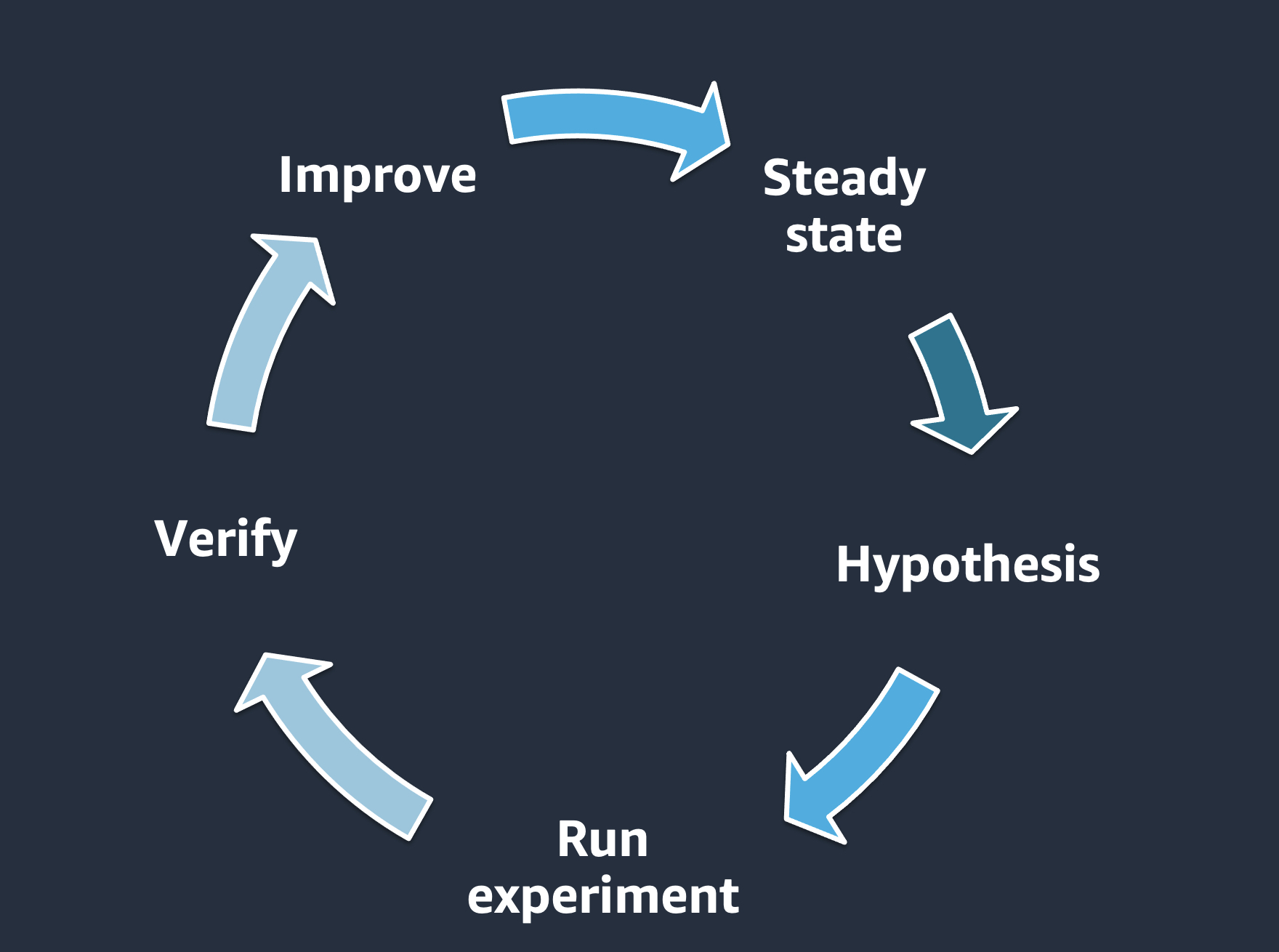
Example—
- Baseline: we have a managed database with a replica and automatic failover enabled.
- Hypothesis: failure of a single database instance / replica may slow down a few requests but will not adversely affect our application.
- Run experiment: trigger a DB failover.
- Verify: confirm/dis-confirm the hypothesis by looking at KPIs for the application (e.g., via CloudWatch metric/alarm).
Methodology and Walkthrough
Let’s look at how you can configure AWS FIS to perform failure conditions for your RDS database instances. For this walkthrough, we’ll look at injecting a cluster failover for Amazon Aurora PostgreSQL. You can leverage an existing Aurora PostgreSQL cluster or you can launch a new cluster by following the steps in the Create an Aurora PostgreSQL DB Cluster documentation.
Step 1: Select the Aurora Cluster.
The Aurora PostgreSQL instance that we’ll use for this walkthrough is provisioned in us-east-1 (N. Virginia), and it’s a cluster with two instances. There is one writer instance and another reader instance (Aurora replica). The cluster is named chaostest, the writer instance is named chaostest-instance-1, and the reader is named chaostest-intance-1-us-east-1a.
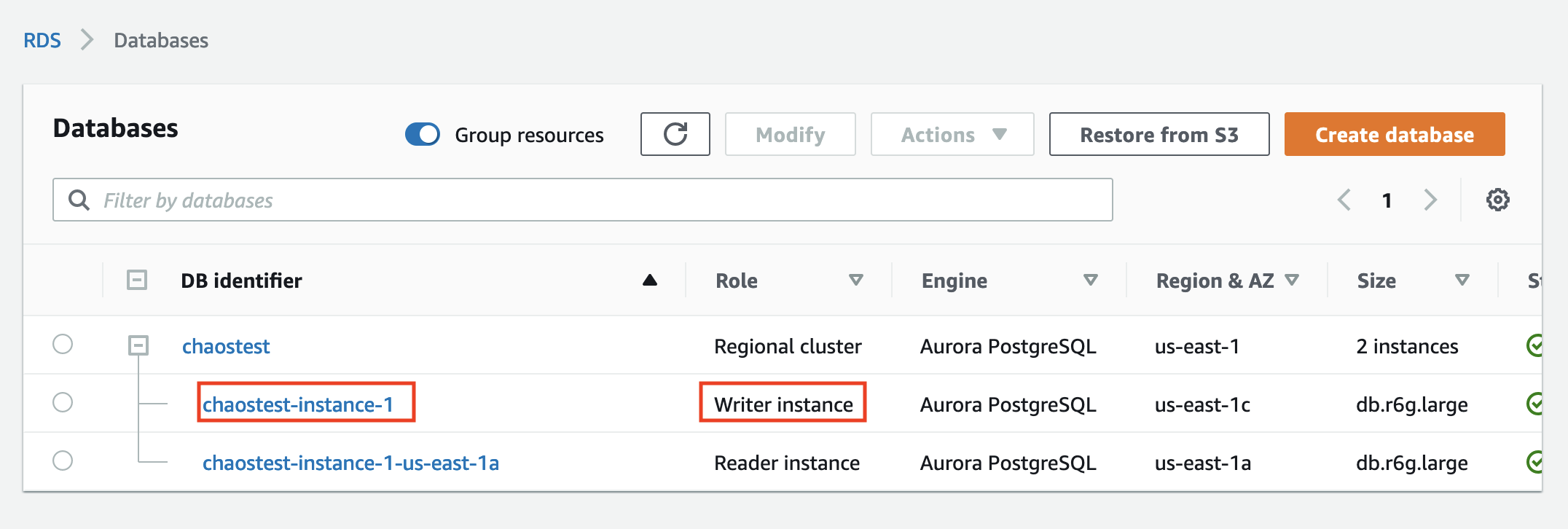
The goal is to simulate a failover for this Aurora PostgreSQL cluster so that the existing chaostest-intance-1-us-east-1a reader instance will switch roles and then be promoted as the writer, and the existing chaostest-instance-1 will become the reader.
Step 2: Navigate to the AWS FIS console.
We will now navigate to the AWS FIS console to create an experiment template. Select Create experiment template.

Step 3: Complete the AWS FIS template pre-requisites.
Enter a Description, Name, and select the AWS IAM Role for the experiment template.
The IAM role selected above was pre-created. To use AWS FIS, you must create an IAM role that grants AWS FIS the permissions required so that the service can run experiments on your behalf. The role follows the least privileged model and includes permissions to act on your database clusters like trigger a failover. AWS FIS only uses the permissions that have been delegated explicitly for the role. To learn more about how to create an IAM role with the required permissions for AWS FIS, refer to the FIS documentation.
Step 4: Navigate to the Actions, Target, Stop Condition section of the template.
The next key section of AWS FIS is Action, Target, and Stop Condition.

Action—An action is an activity that AWS FIS performs on an AWS resource during an experiment. AWS FIS provides a set of pre-configured actions based on the AWS resource type. Each Action runs for a specified duration during an experiment, or until you stop the experiment. An action can run sequentially or in parallel.
For our experiment, the Action will be aws:rds:failover-db-cluster.
Target—A target is one or more AWS resources on which AWS FIS performs an action during an experiment. You can choose specific resources or select a group of resources based on specific criteria, such as tags or state.
For our experiment, the target will be the chaostest Aurora PostgreSQL cluster.
Stop Condition—AWS FIS provides the controls and guardrails that you need to run experiments safely on your AWS workloads. A stop condition is a mechanism to stop an experiment if it reaches a threshold that you define as an Amazon CloudWatch alarm. If a stop condition is triggered while the experiment is running, then AWS FIS stops the experiment.
For our experiment, we won’t be defining a stop condition. This is because this simple experiment contains only one action. Stop conditions are especially useful for experiments with a series of actions, to prevent them from continuing if something goes wrong.
Step 5: Configure Action.
Now, let’s configure the Action and Target for our experiment template. Under the Actions section, we will select Add action to get the New action window.
Enter a Name, a Description, and select Action type aws:rds:failover-db-cluster. Start after is an optional setting. This setting allows you to specify an action that should precede the one we are currently configuring.
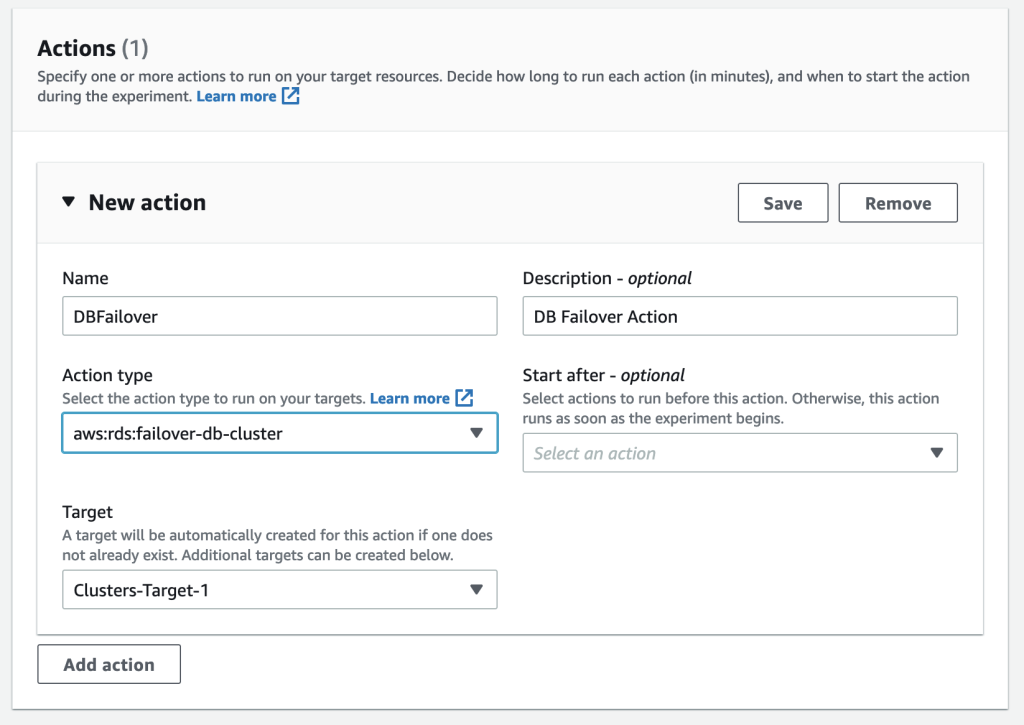
Step 6: Configure Target.
Note that a Target has been automatically created with the name Clusters-Target-1. Select Save to save the action.
Next, you will edit the Clusters-Target-1 target to select the target, i.e., the Aurora PostgreSQL cluster.
Select Target method as Resource IDs, and select the chaostest cluster. If you are interested to select a group of resources, then select Resource tags, filters and parameters option.
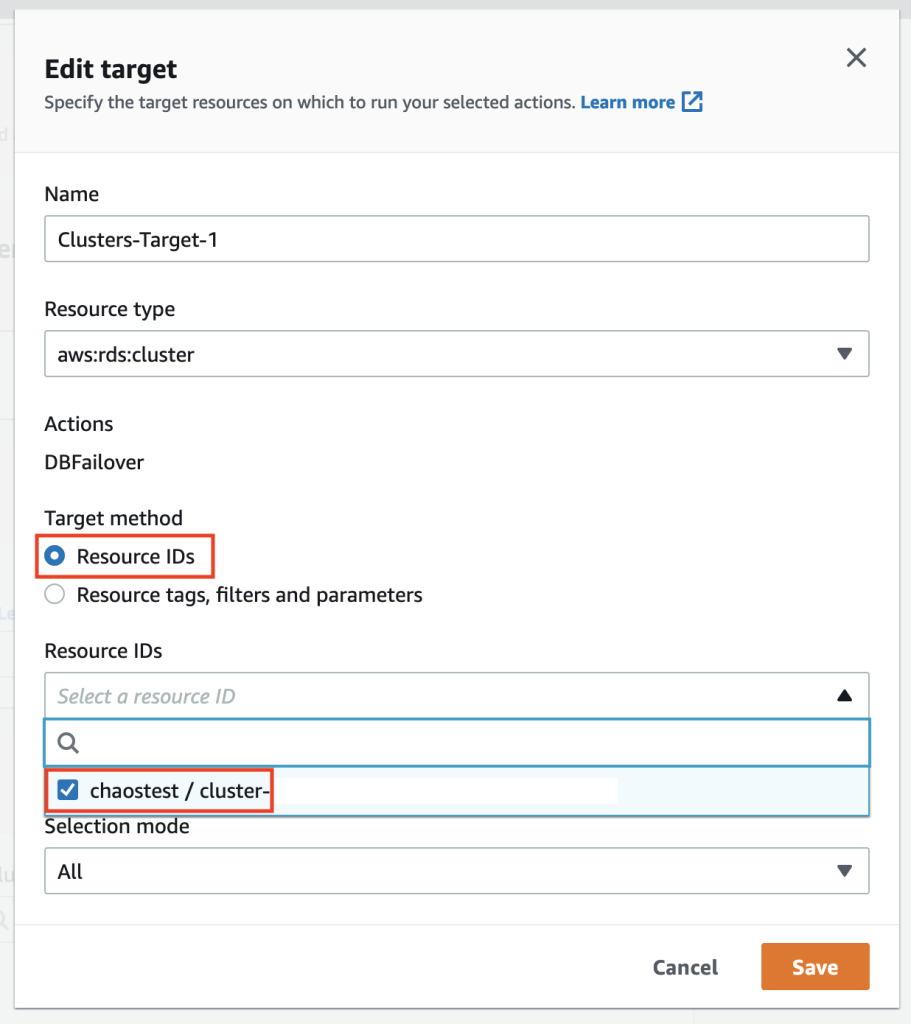
Step 7: Create the experiment template to complete this stage.
We will wrap up the process by selecting the create experiment template.

We will get a warning stating that a stop condition isn’t defined. We’ll enter create in the provided field to create the template.
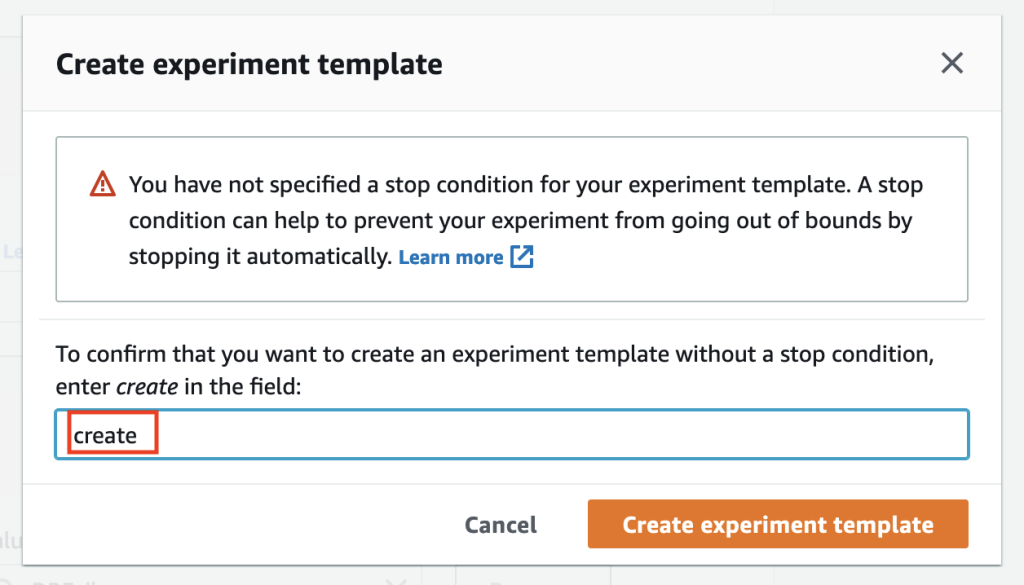
We will get a success message if the entries are correct and the template will be successfully created.

Step 8: Verify the Aurora Cluster.
Before we run the experiment, let’s double-check the chaostest Aurora Cluster to confirm which instance is the writer and which is the reader.
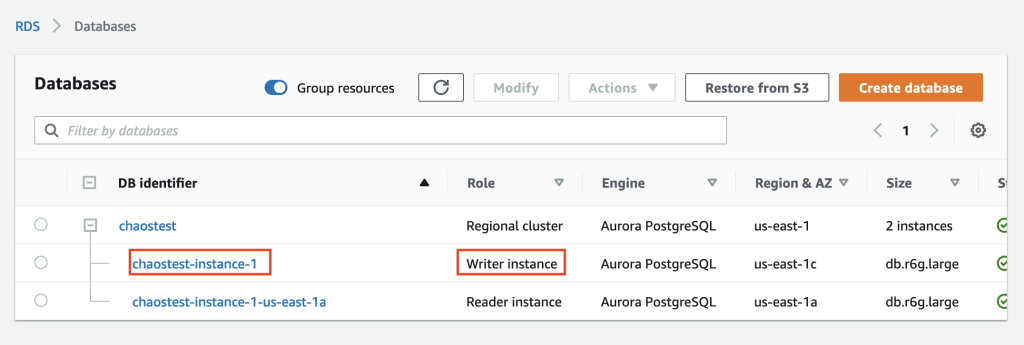
We confirmed that chaostest-instance-1 is the writer and chaostest-instance-1-us-east-1a is the reader.
Step 9: Run the AWS FIS experiment.
Now we’ll run the FIS experiment. Select Actions, and then select Start for the experiment template.
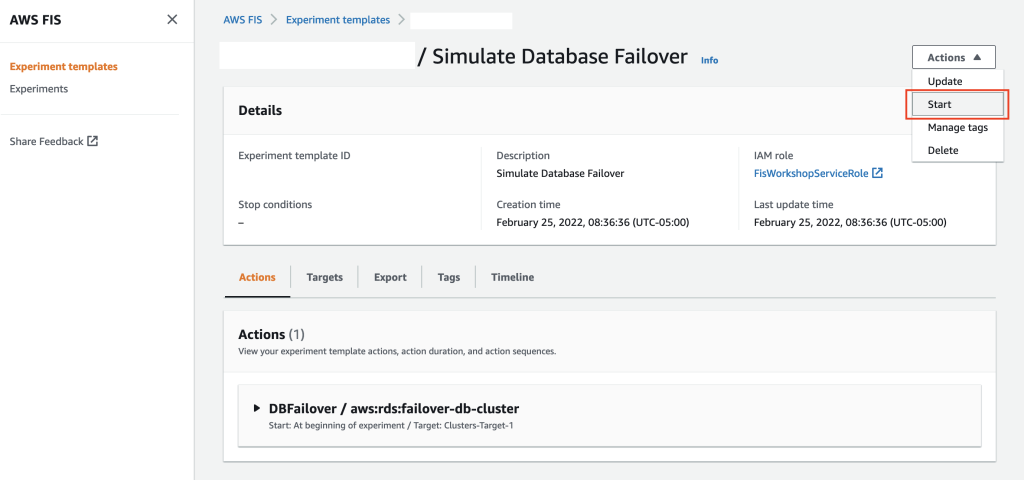
Select Start experiment and you’ll get another warning to confirm if you really want to start this experiment. Confirm by entering start say Start experiment.
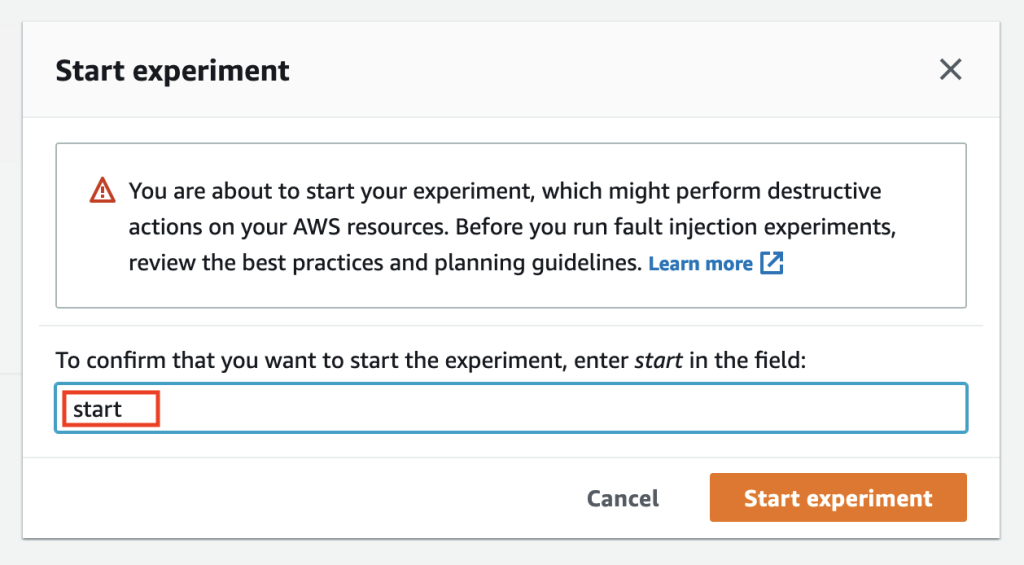
Step 10: Observe the various stages of the experiment.
The experiment will be in initiating, running and will eventually be in completed states.
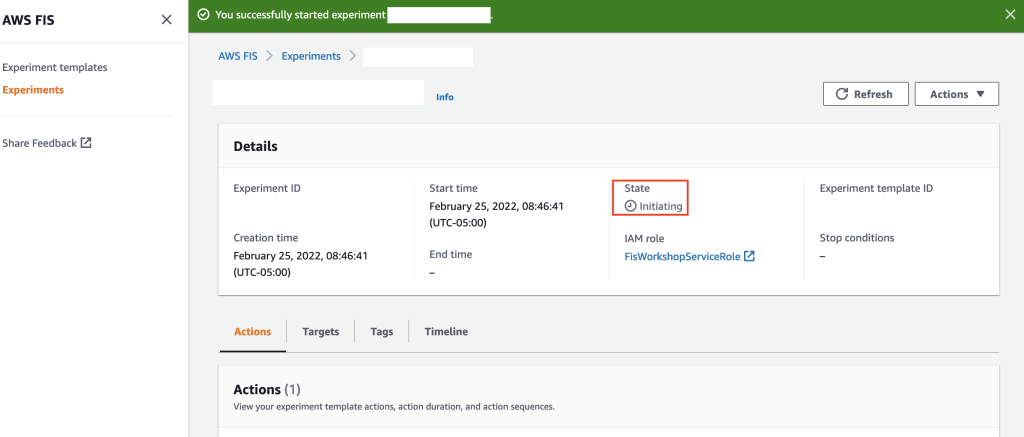

Step 11: Verify the Aurora Cluster to confirm failover.
Now let’s look at the chaostest Aurora PostgreSQL cluster to check the state. Note that a failover was indeed triggered by FIS and chaostest-instance-1-us-east-1a is the newly promoted writer and chaostest-instance-1 is the reader now.

Step 12: Verify the Aurora Cluster logs.
We can also confirm the failover action by looking at the Logs and events section of the Aurora Cluster.
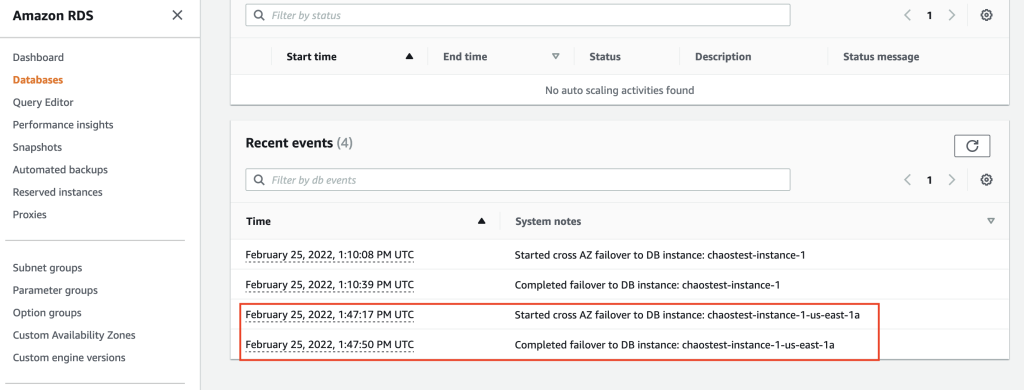
Clean up
If you created a new Aurora PostgreSQL cluster for this walkthrough, then you can terminate the cluster to optimize the costs by following the steps in the Deleting an Aurora DB cluster documentation.
You can also delete the AWS FIS experiment template by following the steps in the Delete an experiment template documentation.
You can refer to the AWS FIS documentation to learn more about the service. If you want to know more about chaos engineering, check out the AWS re:Invent session Testing resiliency using chaos engineering and The Chaos Engineering Collection. Finally, check out the following GitHub repo for additional example experiments, and how you can work with AWS FIS using the AWS Cloud Development Kit (AWS CDK).
Conclusion
In this walkthrough, you learned how you can leverage AWS FIS to inject failures into your RDS Instances. To get started with AWS Fault Injection Service for Amazon RDS, refer to the service documentation.