Post Syndicated from Austin Groeneveld original https://aws.amazon.com/blogs/big-data/optimize-traffic-costs-of-amazon-msk-consumers-on-amazon-eks-with-rack-awareness/
Are you incurring significant cross Availability Zone traffic costs when running an Apache Kafka client in containerized environments on Amazon Elastic Kubernetes Service (Amazon EKS) that consume data from Amazon Managed Streaming for Apache Kafka (Amazon MSK) topics?
If you’re not familiar with Apache Kafka’s rack awareness feature, we strongly recommend starting with the blog post on how to Reduce network traffic costs of your Amazon MSK consumers with rack awareness for an in-depth explanation of the feature and how Amazon MSK supports it.
Although the solution described in that post uses an Amazon Elastic Compute Cloud (Amazon EC2) instance deployed in a single Availability Zone to consume messages from an Amazon MSK topic, modern cloud-native architectures demand more dynamic and scalable approaches. Amazon EKS has emerged as a leading platform for deploying and managing distributed applications. The dynamic nature of Kubernetes introduces unique implementation challenges compared to static client deployments. In this post, we walk you through a solution for implementing rack awareness in consumer applications that are dynamically deployed across multiple Availability Zones using Amazon EKS.
Here’s a quick recap of some key Apache Kafka terminology from the referenced blog. An Apache Kafka client consumer will register to read against a topic. A topic is the logical data structure that Apache Kafka organizes data into. A topic is segmented into a single or many partitions. Partitions are the unit of parallelism in Apache Kafka. Amazon MSK provides high availability by replicating each partition of a topic across brokers in different Availability Zones. Because there are replicas of each partition that reside across the different brokers that make up your MSK cluster, Amazon MSK also tracks whether a replica partition is in sync with the most recent data for that partition. This means there is one partition that Amazon MSK recognizes as containing the most up-to-date data, and this is known as the leader partition. The collection of replicated partitions is called in-sync replicas. This list of in-sync replicas is used internally when the cluster needs to elect a new leader partition if the current leader were to become unavailable.
When consumer applications read from a topic, the Apache Kafka protocol facilitates a network exchange to determine which broker currently has the leader partition that the consumer needs to read from. This means that the consumer could be told to read from a broker in a different Availability Zone than itself, leading to cross-zone traffic charge in your AWS account. To help optimize this cost, Amazon MSK supports the rack awareness feature, using which clients can ask an Amazon MSK cluster to provide a replica partition to read from, within the same Availability Zone as the client, even if it isn’t the current leader partition. The cluster accomplishes this by checking for an in-sync replica on a broker within the same Availability Zone as the consumer.
The challenge with Kafka clients on Amazon EKS
In Amazon EKS, the underlying units of computes are EC2 instances that are abstracted as Kubernetes nodes. The nodes are organized into node groups for ease of management, scaling, and grouping of applications on certain EC2 instance types. As a best practice for resilience, the nodes in a node group are spread across multiple Availability Zones. Amazon EKS uses the underlying Amazon EC2 metadata about the Availability Zone that it’s located in, and it injects that information into the node’s metadata during node configuration. In particular, the Availability Zone (AZ ID) is injected into the node metadata.
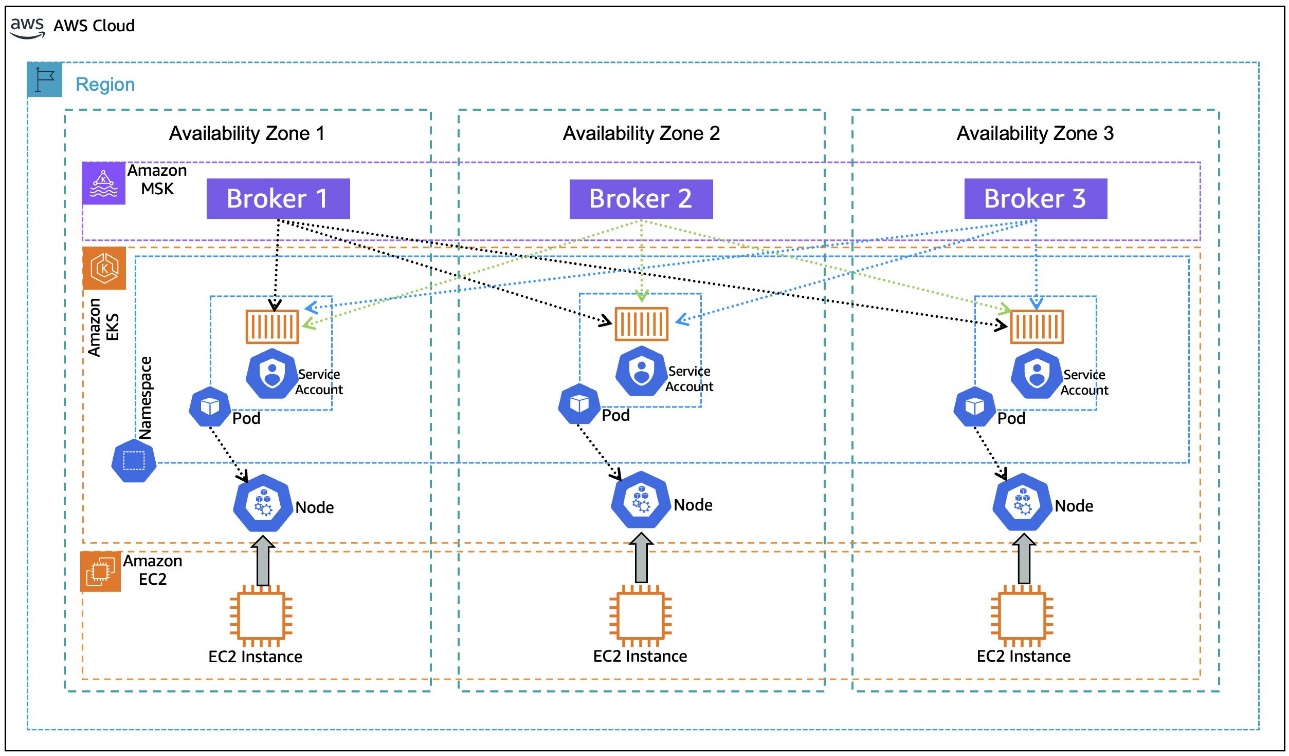
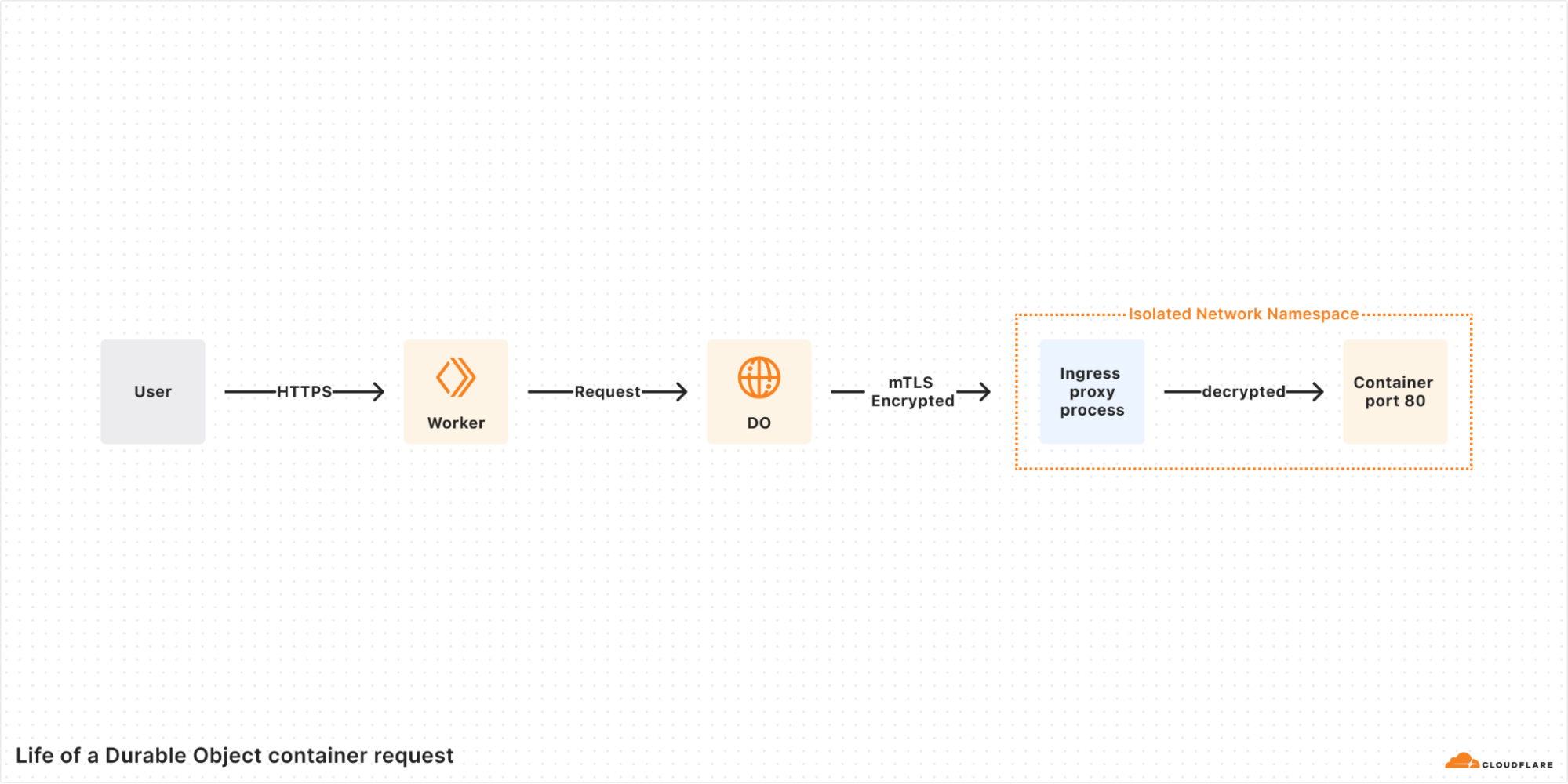
When an application is deployed in a Kubernetes Pod on Amazon EKS, it goes through a process of binding to a node that meets the pod’s requirements. As shown in the following diagram, when you deploy client applications on Amazon EKS, the pod for the application can be bound to a node with available capacity in any Availability Zone. Also, the pod doesn’t automatically inherit the Availability Zone information from the node that it’s bound to, a piece of information necessary for rack awareness. The following architecture diagram illustrates Kafka consumers running on Amazon EKS without rack awareness.

To set the client configuration for rack awareness, the pod needs to know what Availability Zone it’s located in, dynamically, as it is bound to a node. During its lifecycle, the same pod can be evicted from the node it was bound to previously and moved to a node in a different Availability Zone, if the matching criteria permit that. Making the pod aware of its Availability Zone dynamically sets the rack awareness parameter client.rack during the initialization of the application container that is encapsulated in the pod.
After rack awareness is enabled on the MSK cluster, what happens if the broker in the same Availability Zone as the client (hosted on Amazon EKS or elsewhere) becomes unavailable? The Apache Kafka protocol is designed to support a distributed data storage system. Assuming customers follow the best practice of implementing a replication factor > 1, Apache Kafka can dynamically reroute the consumer client to the next available in-sync replica on a different broker. This resilience remains consistent even after implementing nearest replica fetching, or rack awareness. Enabling rack awareness optimizes the networking exchange to prefer a partition within the same Availability Zone, but it doesn’t compromise the consumer’s ability to operate if the nearest replica is unavailable.
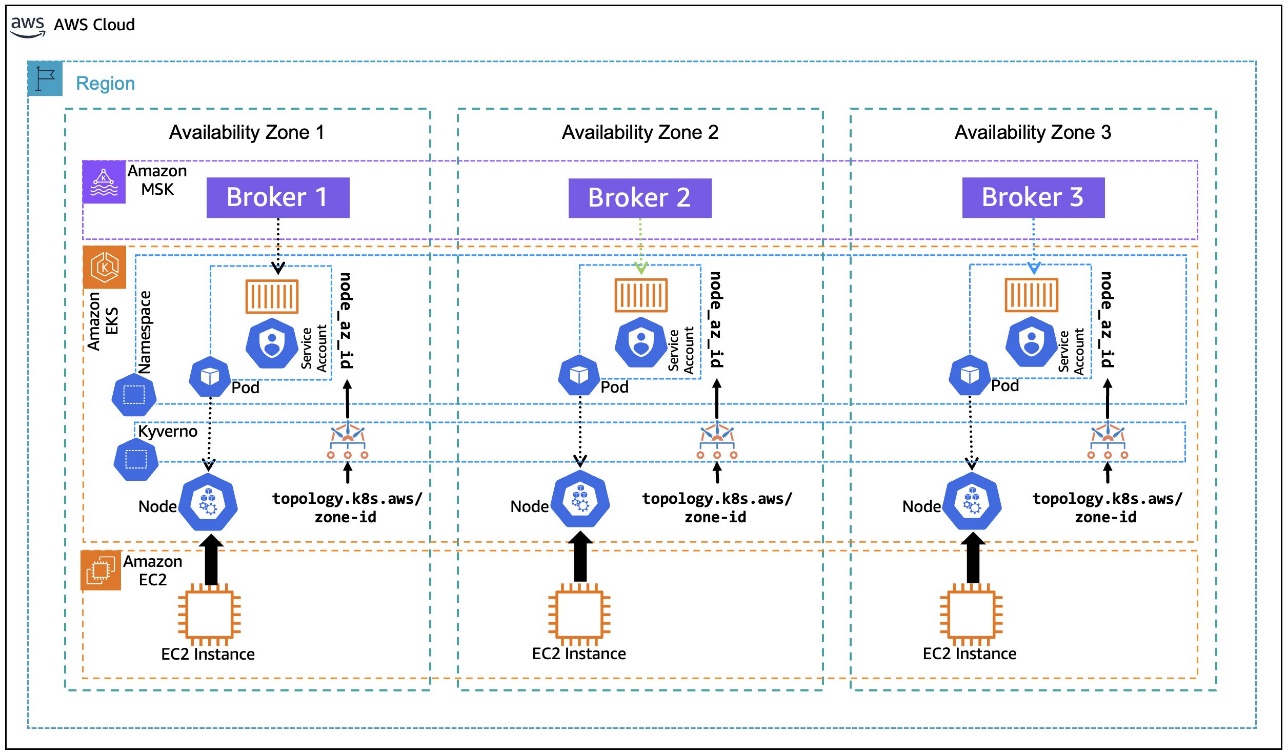
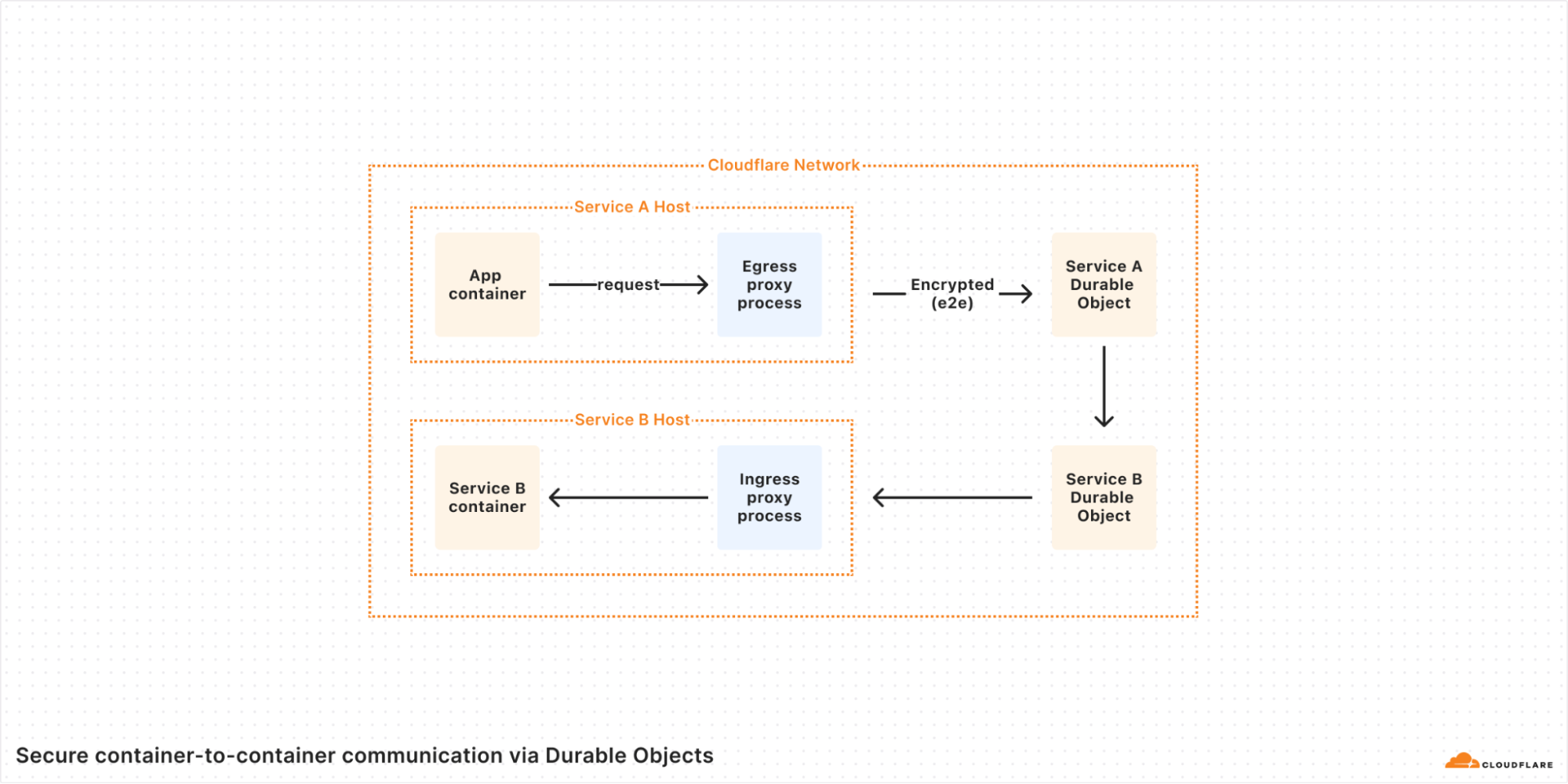
In this post, we walk you through an example of how to use the Kubernetes metadata label, topology.k8s.aws/zone-id, assigned to each node by Amazon EKS, and use an open source policy engine, Kyverno, to deploy a policy that mutates the pods that are in the binding state to dynamically inject the node’s AZ ID into the pod’s metadata as an annotation, as depicted in the following diagram. This annotation, in turn, is used by the container to create an environment variable that is assigned the pod’s annotated AZ ID information. The environment variable is then used in the container postStart lifecycle hook to generate the Kafka client configuration file with rack awareness setting. The following architecture diagram illustrates Kafka consumers running on Amazon EKS with rack awareness.

Solution Walkthrough
Prerequisites
For this walkthrough, we use AWS CloudShell to run the scripts that are provided inline as you progress. For a smooth experience, before getting started, make sure to have kubectl and eksctl installed and configured in the AWS CloudShell environment, following the installation instructions for Linux (amd64). Helm is also required to be install on AWS CloudShell, using the instructions for Linux.
Also, check if the envsubst tool is installed in your CloudShell environment by invoking:
If the tool isn’t installed, you can install it using the command:
sudo dnf -y install gettext-devel
We also assume you already have an MSK cluster deployed in an Amazon Virtual Private Cloud (VPC) in three Availability Zones with the name MSK-AZ-Aware. In this walkthrough, we use AWS Identity and Access Management (IAM) authentication for client access control to the MSK cluster. If you’re using a cluster in your account with a different name, replace the instances of MSK-AZ-Aware in the instructions.
We follow the same MSK cluster configuration mentioned in the Rack Awareness blog mentioned previously, with some modifications. (Ensure you’ve set replica.selector.class = org.apache.kafka.common.replica.RackAwareReplicaSelector for the reasons discussed there). In our configuration, we add one line: num.partitions = 6. Although not mandatory, this ensures that topics that are automatically created will have multiple partitions to support clearer demonstrations in subsequent sections.
Finally, we use the Amazon MSK Data Generator with the following configuration:
{
"name": "msk-data-generator",
"config": {
"connector.class": "com.amazonaws.mskdatagen.GeneratorSourceConnector",
"genkp.MSK-AZ-Aware-Topic.with": "#{Internet.uuid}",
"genv.MSK-AZ-Aware-Topic.product_id.with": "#{number.number_between '101','200'}",
"genv.MSK-AZ-Aware-Topic.quantity.with": "#{number.number_between '1','5'}",
"genv.MSK-AZ-Aware-Topic.customer_id.with": "#{number.number_between '1','5000'}"
}
}
Running the MSK Data Generator with this configuration will automatically create a six-partition topic named MSK-AZ-Aware-Topic on our cluster for us, and it will push data to that topic. To follow along with the walkthrough, we recommend and assume that you deploy the MSK Data Generator to create the topic and populate it with simulated data.
Create the EKS cluster
The first step is to install an EKS cluster in the same Amazon VPC subnets as the MSK cluster. You can modify the name of the MSK cluster by changing that environment variable MSK_CLUSTER_NAME if your cluster is created with a different name than suggested. You can also change the Amazon EKS cluster name by changing EKS_CLUSTER_NAME.
The environment variables that we define here are used throughout the walkthrough.
The last step is to update the kubeconfig with an entry for the EKS cluster:
AWS_ACCOUNT=$(aws sts get-caller-identity --output text --query Account)
export AWS_ACCOUNT
export AWS_REGION=${AWS_DEFAULT_REGION}
export MSK_CLUSTER_NAME=MSK-AZ-Aware
export EKS_CLUSTER_NAME=EKS-AZ-Aware
export EKS_CLUSTER_SIZE=3
export K8S_VERSION=1.32
export POD_ID_VERSION=1.3.5
MSK_BROKER_SG=$(aws kafka list-clusters \
--query 'ClusterInfoList[?ClusterName==`'${MSK_CLUSTER_NAME}'`].BrokerNodeGroupInfo.SecurityGroups' \
--output text | xargs)
export MSK_BROKER_SG
MSK_BROKER_CLIENT_SUBNETS=$(aws kafka list-clusters \
--query 'ClusterInfoList[?ClusterName==`'${MSK_CLUSTER_NAME}'`].BrokerNodeGroupInfo.ClientSubnets' \
--output text | xargs)
export MSK_BROKER_CLIENT_SUBNETS
VPC_ID=$(aws ec2 describe-subnets \
--subnet-ids "$(echo "${MSK_BROKER_CLIENT_SUBNETS}" | cut -d' ' -f1)" \
--query 'Subnets[0].VpcId' \
--output text)
export VPC_ID
EKS_SUBNETS=$(echo ${MSK_BROKER_CLIENT_SUBNETS} | sed 's/ \+/,/g')
export EKS_SUBNETS
# Create a minimal config file for encrypted node volumes
cat > eks-config.yaml << EOF
apiVersion: eksctl.io/v1alpha5
kind: ClusterConfig
metadata:
name: ${EKS_CLUSTER_NAME}
region: ${AWS_REGION}
version: "${K8S_VERSION}"
vpc:
id: "${VPC_ID}"
subnets:
public:
$(for subnet in ${MSK_BROKER_CLIENT_SUBNETS}; do
AZ=$(aws ec2 describe-subnets --subnet-ids "$subnet" --query 'Subnets[0].AvailabilityZone' --output text)
echo " $AZ: { id: $subnet }"
done)
nodeGroups:
- name: ng1
instanceType: m5.xlarge
desiredCapacity: ${EKS_CLUSTER_SIZE}
minSize: ${EKS_CLUSTER_SIZE}
maxSize: ${EKS_CLUSTER_SIZE}
securityGroups:
attachIDs: ["${MSK_BROKER_SG}"]
volumeSize: 100
volumeType: gp3
volumeEncrypted: true
EOF
eksctl create cluster -f eks-config.yaml
aws eks update-kubeconfig \
--region "${AWS_REGION}" \
--name ${EKS_CLUSTER_NAME}
Next, you need to create an IAM policy, MSK-AZ-Aware-Policy, to allow access from the Amazon EKS pods to the MSK cluster. Note here that we’re using MSK-AZ-Aware as the cluster name.
Create a file, msk-az-aware-policy.json, with the IAM policy template:
cat > msk-az-aware-policy.json << EOF
{
"Version": "2012-10-17",
"Statement": [
{
"Effect": "Allow",
"Action": [
"kafka-cluster:Connect",
"kafka-cluster:AlterCluster",
"kafka-cluster:DescribeCluster",
"kafka-cluster:DescribeClusterDynamicConfiguration",
"kafka-cluster:AlterClusterDynamicConfiguration"
],
"Resource": [
"arn:aws:kafka:${AWS_REGION}:${AWS_ACCOUNT}:cluster/${MSK_CLUSTER_NAME}/*"
]
},
{
"Effect": "Allow",
"Action": [
"kafka-cluster:*Topic*",
"kafka-cluster:WriteData",
"kafka-cluster:ReadData"
],
"Resource": [
"arn:aws:kafka:${AWS_REGION}:${AWS_ACCOUNT}:topic/${MSK_CLUSTER_NAME}/*"
]
},
{
"Effect": "Allow",
"Action": [
"kafka-cluster:AlterGroup",
"kafka-cluster:DescribeGroup"
],
"Resource": [
"arn:aws:kafka:${AWS_REGION}:${AWS_ACCOUNT}:group/${MSK_CLUSTER_NAME}/*"
]
}
]
}
EOF
To create the IAM policy, use the following command. It first replaces the placeholders in the policy file with values from relevant environment variables, and then creates the IAM policy:
envsubst < msk-az-aware-policy.json | \
xargs -0 -I {} aws iam create-policy \
--policy-name MSK-AZ-Aware-Policy \
--policy-document {}
Configure EKS Pod Identity
Amazon EKS Pod Identity offers a simplified experience for obtaining IAM permissions for pods on Amazon EKS. This requires installing an add-on Amazon EKS Pod Identity Agent to the EKS cluster:
eksctl create addon \
--cluster ${EKS_CLUSTER_NAME} \
--name eks-pod-identity-agent \
--version ${POD_ID_VERSION}
Confirm that the add-on has been installed and its status is ACTIVE and that the status of all the pods associated with the add-on is Running.
eksctl get addon \
--cluster ${EKS_CLUSTER_NAME} \
--region "${AWS_REGION}" \
--name eks-pod-identity-agent -o json
kubectl get pods \
-n kube-system \
-l app.kubernetes.io/instance=eks-pod-identity-agent
After you’ve installed the add-on, you need to create a pod identity association between a Kubernetes service account and the IAM policy created earlier:
eksctl create podidentityassociation \
--namespace kafka-ns \
--service-account-name kafka-sa \
--role-name EKS-AZ-Aware-Role \
--permission-policy-arns arn:aws:iam::"${AWS_ACCOUNT}":policy/MSK-AZ-Aware-Policy \
--cluster ${EKS_CLUSTER_NAME} \
--region "${AWS_REGION}"
Install Kyverno
Kyverno is an open source policy engine for Kubernetes that allows for validation, mutation, and generation of Kubernetes resources using policies written in YAML, thus simplifying the enforcement of security and compliance requirements. You need to install Kyverno to dynamically inject metadata into the Amazon EKS pods as they enter the binding state to inform them of Availability Zone ID.
In AWS CloudShell, create a file named kyverno-values.yaml. This file defines the Kubernetes RBAC permissions for Kyverno’s Admission Controller to read Amazon EKS node metadata because the default Kyverno (v. 1.13 onwards) settings don’t allow this:
cat > kyverno-values.yaml << EOF
admissionController:
rbac:
clusterRole:
extraResources:
- apiGroups:
- ""
resources:
- "nodes"
verbs:
- get
- list
- watch
EOF
After this file is created, you can install Kyverno using helm and providing the values file created in the previous step:
helm repo add kyverno https://kyverno.github.io/kyverno/
helm repo update
helm install kyverno kyverno/kyverno \
-n kyverno \
--create-namespace \
--version 3.3.7 \
-f kyverno-values.yaml
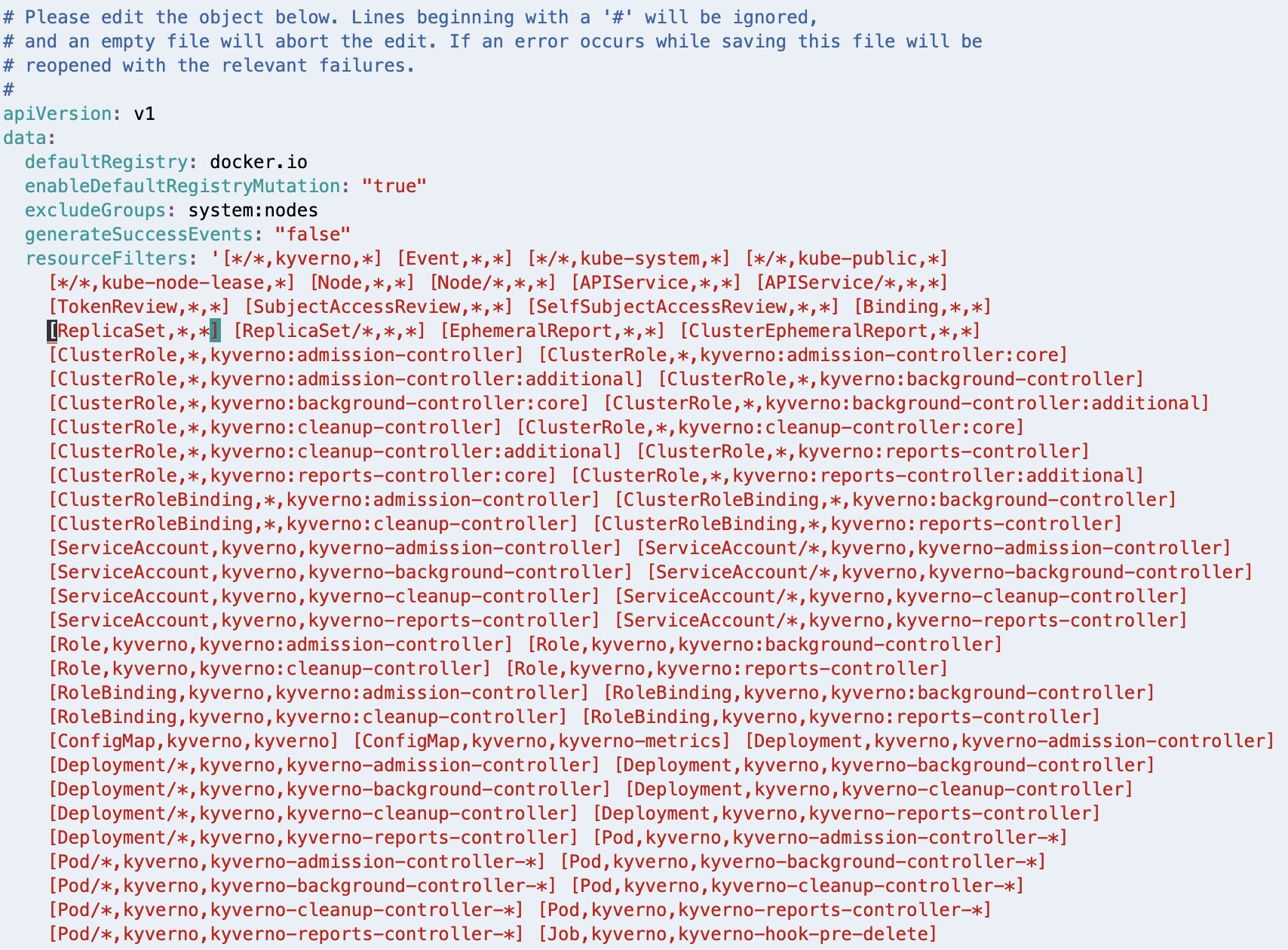
Starting with Kyverno v 1.13, the Admission Controller is configured to ignore the AdmissionReview requests for pods in binding state. This needs to be changed by editing the Kyverno ConfigMap:
kubectl -n kyverno edit configmap kyverno
The kubectl edit command uses the default editor configured in your environment (in our case Linux VIM).
This will open the ConfigMap in a text editor.
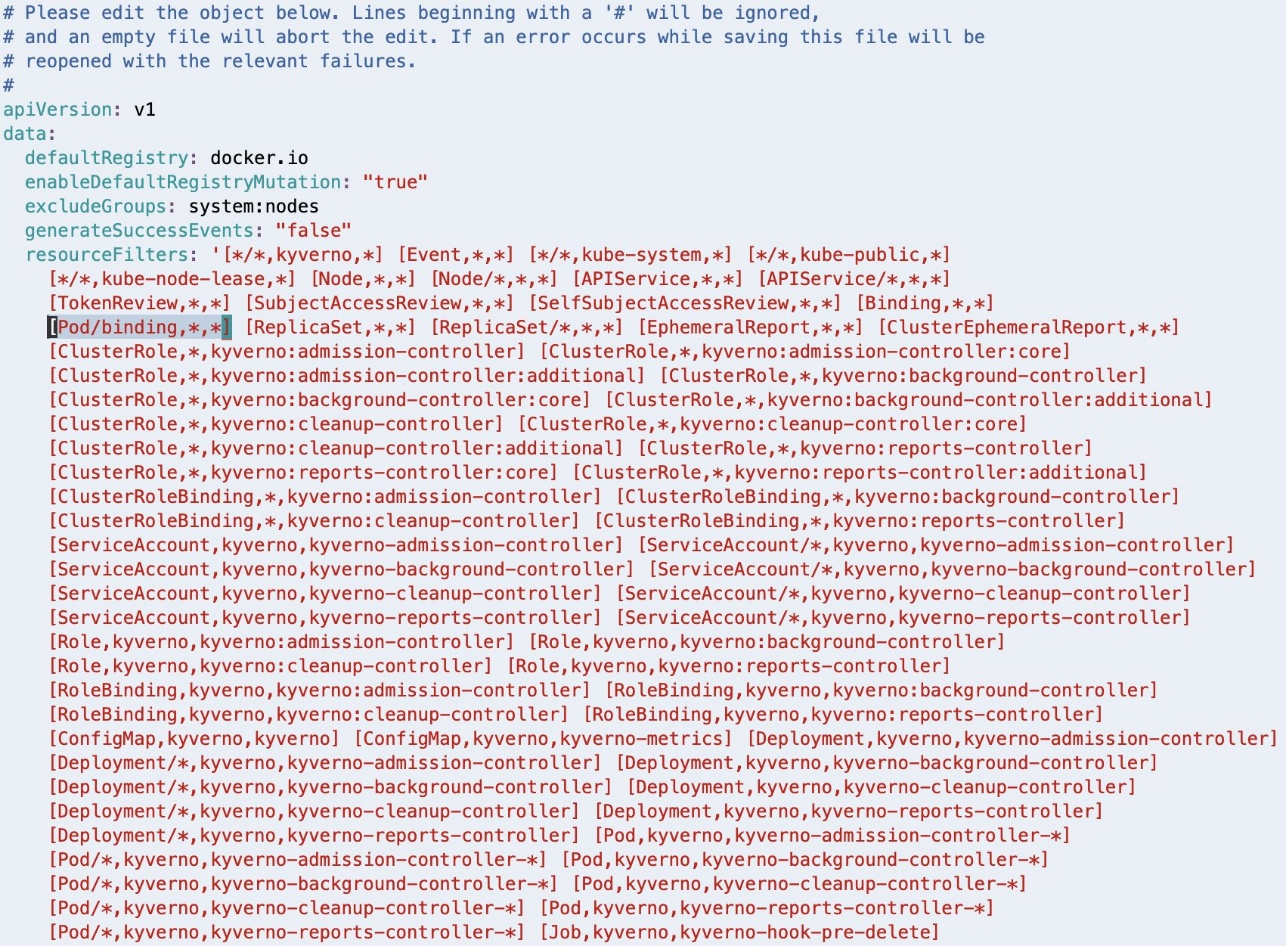
As highlighted in the following screenshot, [Pod/binding,*,*] should be removed from the resourceFilters field for the Kyverno Admission Controller to process AdmissionReview requests for pods in binding state.

If Linux VIM is your default editor, you can delete the entry using VIM command 18x, meaning delete (or cut) 18 characters from the current cursor position. Save the modified configuration using the VIM command :wq, meaning write (or save) the file and quit.
After deleting, the resourceFilters field should look similar to the following screenshot.

If you have a different editor configured in your environment, follow the appropriate steps to achieve a similar outcome.
Configure Kyverno policy
You need to configure the policy that will make the pods rack aware. This policy is adapted from the suggested approach in the Kyverno blog post, Assigning Node Metadata to Pods. Create a new file with the name kyverno-inject-node-az-id.yaml:
cat > kyverno-inject-node-az-id.yaml << EOF
apiVersion: kyverno.io/v2beta1
kind: ClusterPolicy
metadata:
name: inject-node-az-id
spec:
background: false
rules:
- name: inject-node-az-id
match:
any:
- resources:
kinds:
- Pod/binding
context:
- name: node
variable:
jmesPath: request.object.target.name
default: ''
- name: node_az_id
apiCall:
urlPath: "/api/v1/nodes/{{node}}"
jmesPath: "metadata.labels.\"topology.k8s.aws/zone-id\" || 'empty'"
mutate:
patchStrategicMerge:
metadata:
annotations:
node_az_id: "{{ node_az_id }}"
EOF
It instructs Kyverno to watch for pods in binding state. After Kyverno receives the AdmissionReview request for a pod, it sets the variable node to the name of the node to which the pod is being bound. It also sets another variable node_az_id to the Availability Zone ID by calling the Kubernetes API /api/v1/nodes/node to get the node metadata label topology.k8s.aws/zone-id. Finally, it defines a mutate rule to inject the obtained AZ ID into the pod’s metadata as an annotation node_az_id.
After you’ve created the file, apply the policy using the following command:
kubectl apply -f kyverno-inject-node-az-id.yaml
Deploy a pod without rack awareness
Now let’s visualize the problem statement. To do this, connect to one of the EKS pods and check how it interacts with the MSK cluster when you run a Kafka consumer from the pod.
First, get the bootstrap string of the MSK cluster. Look up the Amazon Resource Names (ARNs) of the MSK cluster:
MSK_CLUSTER_ARN=$(
aws kafka list-clusters \
--query 'ClusterInfoList[?ClusterName==`'${MSK_CLUSTER_NAME}'`].ClusterArn' \
--output text)
export MSK_CLUSTER_ARN
Using the cluster ARN, you can get the bootstrap string with the following command:
BOOTSTRAP_SERVER_LIST=$(
aws kafka get-bootstrap-brokers \
--cluster-arn "${MSK_CLUSTER_ARN}" \
--query 'BootstrapBrokerStringSaslIam' \
--output text)
export BOOTSTRAP_SERVER_LIST
Create a new file named kafka-no-az.yaml:
cat > kafka-no-az.yaml << EOF
apiVersion: v1
kind: Namespace
metadata:
name: kafka-ns
---
apiVersion: v1
kind: ServiceAccount
metadata:
name: kafka-sa
namespace: kafka-ns
automountServiceAccountToken: false
---
apiVersion: apps/v1
kind: Deployment
metadata:
name: kafka-no-az
namespace: kafka-ns
labels:
app: kafka-no-az
annotations:
node_az_id: ''
spec:
replicas: 3
selector:
matchLabels:
app: kafka-no-az
template:
metadata:
labels:
app: kafka-no-az
spec:
serviceAccountName: kafka-sa
containers:
- image: bitnami/kafka:3.8.0
name: kafka-no-az
command: ["/bin/sh", "-ec", "while :; do echo '.'; sleep 5 ; done"]
env:
- name: BootstrapServerString
value: ${BOOTSTRAP_SERVER_LIST}
- name: MSK_TOPIC
value: "MSK-AZ-Aware-Topic"
- name: KAFKA_HOME
value: /opt/bitnami/kafka
- name: KAFKA_BIN
value: /opt/bitnami/kafka/bin
- name: KAFKA_CONFIG
value: /opt/bitnami/kafka/config
- name: KAFKA_LIBS
value: /opt/bitnami/kafka/libs
- name: KAFKA_LOG4J_OPTS
value: "-Dlog4j.configuration=file:/opt/bitnami/kafka/config/log4j.properties"
lifecycle:
postStart:
exec:
command:
- "sh"
- "-c"
- |
export KAFKA_HOME=/opt/bitnami/kafka
export KAFKA_BIN=\${KAFKA_HOME}/bin
export KAFKA_CONFIG=\${KAFKA_HOME}/config
cat > \${KAFKA_CONFIG}/client.properties << EOF1
security.protocol=SASL_SSL
sasl.mechanism=AWS_MSK_IAM
sasl.jaas.config=software.amazon.msk.auth.iam.IAMLoginModule required;
sasl.client.callback.handler.class=software.amazon.msk.auth.iam.IAMClientCallbackHandler
EOF1
cat >> \${KAFKA_CONFIG}/log4j.properties << EOF2
#
# Enable logging of Kafka Client to stderr
#
log4j.rootLogger=WARN, stderr
log4j.logger.org.apache.kafka.clients.consumer.internals.AbstractFetch=DEBUG
log4j.appender.stderr=org.apache.log4j.ConsoleAppender
log4j.appender.stderr.layout=org.apache.log4j.PatternLayout
log4j.appender.stderr.layout.ConversionPattern=[%d] %p %m (%c)%n
log4j.appender.stderr.Target=System.err
EOF2
cd \${KAFKA_HOME}/libs
/usr/bin/curl -sS -L https://github.com/aws/aws-msk-iam-auth/releases/download/v2.2.0/aws-msk-iam-auth-2.2.0-all.jar --output \${KAFKA_LIBS}/aws-msk-iam-auth-2.2.0-all.jar
EOF
This pod manifest doesn’t make use of the Availability Zone ID injected into the metadata annotation and hence doesn’t add client.rack to the client.properties configuration.
Deploy the pods using the following command:
kubectl apply -f kafka-no-az.yaml
Run the following command to confirm that the pods have been deployed and are in the Running state:
kubectl -n kafka-ns get pods
Select a pod id from the output of the previous command, and connect to it using:
kubectl -n kafka-ns exec -it POD_ID -- sh
Run the Kafka consumer:
"${KAFKA_BIN}"/kafka-console-consumer.sh \
--bootstrap-server "${BootstrapServerString}" \
--consumer.config "${KAFKA_CONFIG}"/client.properties \
--topic "${MSK_TOPIC}" \
--from-beginning /tmp/non-rack-aware-consumer.log 2>&1 &
This command will dump all the resulting logs into the file, non-rack-aware-consumer.log. There’s a lot of information in those logs, and we encourage you to open them and take a deeper look. Next, examine the EKS pod in action. To do this, run the following command to tail the file to view fetch request results to the MSK cluster. You’ll notice a handful of meaningful logs to review as the consumer access various partitions of the Kafka topic:
grep -E "DEBUG.*Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-[0-9]+" /tmp/rack-aware-consumer.log | tail -5
Observe your log output, which should look similar to the following:
[2025-03-12 23:59:05,308] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-3 at position FetchPosition{offset=100, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,308] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-0 at position FetchPosition{offset=83, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,542] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-5 at position FetchPosition{offset=100, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4)], epoch=0}} to node b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,542] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-2 at position FetchPosition{offset=107, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4)], epoch=0}} to node b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,720] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-4 at position FetchPosition{offset=84, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2)], epoch=0}} to node b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,720] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-1 at position FetchPosition{offset=85, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2)], epoch=0}} to node b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,811] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-3 at position FetchPosition{offset=100, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-12 23:59:05,811] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-24102] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-0 at position FetchPosition{offset=83, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
You’ve now connected to a specific pod in the EKS cluster and run a Kafka consumer to read from the MSK topic without rack awareness. Remember that this pod is running within a single Availability Zone.
Reviewing the log output, you find rack: values as use1-az2, use1-az4, and use1-az6 as the pod makes calls to different partitions of the topic. These rack values represent the Availability Zone IDs that our brokers are running within. This means that our EKS pod is creating networking connections to brokers across three different Availability Zones, which would be accruing networking charges in our account.
Also notice that you have no way to check which node, and therefore Availability Zone, this EKS pod is running in. You can observe in the logs that it’s calling to MSK brokers in different Availability Zones, but there is no way to know which broker is in the same Availability Zone as the EKS pod you’ve connected to. Delete the deployment when you’re done:
kubectl -n kafka-ns delete -f kafka-no-az.yaml
Deploy a pod with rack awareness
Now that you have experienced the consumer behavior without rack awareness, you need to inject the Availability Zone ID to make your pods rack-aware.
Create a new file named kafka-az-aware.yaml:
cat > kafka-az-aware.yaml << EOF
apiVersion: v1
kind: Namespace
metadata:
name: kafka-ns
---
apiVersion: v1
kind: ServiceAccount
metadata:
name: kafka-sa
namespace: kafka-ns
automountServiceAccountToken: false
---
apiVersion: apps/v1
kind: Deployment
metadata:
name: kafka-az-aware
namespace: kafka-ns
labels:
app: kafka-az-aware
annotations:
node_az_id: ''
spec:
replicas: 3
selector:
matchLabels:
app: kafka-az-aware
template:
metadata:
labels:
app: kafka-az-aware
spec:
serviceAccountName: kafka-sa
containers:
- image: bitnami/kafka:3.8.0
name: kafka-az-aware
command: ["/bin/sh", "-ec", "while :; do echo '.'; sleep 5 ; done"]
env:
- name: BootstrapServerString
value: ${BOOTSTRAP_SERVER_LIST}
- name: MSK_TOPIC
value: "MSK-AZ-Aware-Topic"
- name: KAFKA_HOME
value: /opt/bitnami/kafka
- name: KAFKA_BIN
value: /opt/bitnami/kafka/bin
- name: KAFKA_CONFIG
value: /opt/bitnami/kafka/config
- name: KAFKA_LIBS
value: /opt/bitnami/kafka/libs
- name: KAFKA_LOG4J_OPTS
value: "-Dlog4j.configuration=file:/opt/bitnami/kafka/config/log4j.properties"
- name: NODE_AZ_ID
valueFrom:
fieldRef:
fieldPath: metadata.annotations['node_az_id']
lifecycle:
postStart:
exec:
command:
- "sh"
- "-c"
- |
export KAFKA_HOME=/opt/bitnami/kafka
export KAFKA_BIN=\${KAFKA_HOME}/bin
export KAFKA_CONFIG=\${KAFKA_HOME}/config
cat > \${KAFKA_CONFIG}/client.properties << EOF1
security.protocol=SASL_SSL
sasl.mechanism=AWS_MSK_IAM
sasl.jaas.config=software.amazon.msk.auth.iam.IAMLoginModule required;
sasl.client.callback.handler.class=software.amazon.msk.auth.iam.IAMClientCallbackHandler
EOF1
if [ \$NODE_AZ_ID ]
then
echo "client.rack=\$NODE_AZ_ID" >> \${KAFKA_CONFIG}/client.properties
fi
cat >> \${KAFKA_CONFIG}/log4j.properties << EOF2
#
# Enable logging of Kafka Client to stderr
#
log4j.rootLogger=WARN, stderr
log4j.logger.org.apache.kafka.clients.consumer.internals.AbstractFetch=DEBUG
log4j.appender.stderr=org.apache.log4j.ConsoleAppender
log4j.appender.stderr.layout=org.apache.log4j.PatternLayout
log4j.appender.stderr.layout.ConversionPattern=[%d] %p %m (%c)%n
log4j.appender.stderr.Target=System.err
EOF2
/usr/bin/curl -sS -L https://github.com/aws/aws-msk-iam-auth/releases/download/v2.2.0/aws-msk-iam-auth-2.2.0-all.jar --output \${KAFKA_LIBS}/aws-msk-iam-auth-2.2.0-all.jar
EOF
As you can observe, the pod manifest defines an environment variable NODE_AZ_ID, assigning it the value from the pod’s own metadata annotation node_az_id that was injected by Kyverno. The manifest then uses the pod’s postStart lifecycle script to add client.rack into the client.properties configuration, setting it equal to the value in the environment variable NODE_AZ_ID.
Deploy the pods using the following command:
kubectl apply -f kafka-az-aware.yaml
Run the following command to confirm that the pods have been deployed and are in the Running state:
kubectl -n kafka-ns get pods
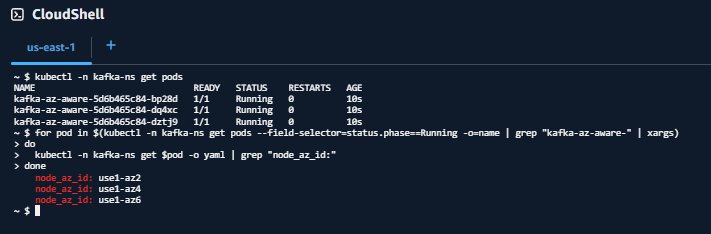
Verify that Availability Zone Ids have been injected into the pods
for pod in $(kubectl -n kafka-ns get pods --field-selector=status.phase==Running -o=name | grep "pod/kafka-az-aware-" | xargs)
do
kubectl -n kafka-ns get "$pod" -o yaml | grep "node_az_id:"
done
Your output should look similar to:
node_az_id: use1-az2
node_az_id: use1-az4
node_az_id: use1-az6
Or:

Select a pod id from the output of the get pods command and shell-in to it.
kubectl -n kafka-ns exec -it POD_ID -- sh
The output of the get $pod command matches the order of results from the get pods command. This matching will help you understand what Availability Zone your pod is running in so you can compare it to log outputs later.
After you’ve connected to your pod, run the Kafka consumer:
"${KAFKA_BIN}"/kafka-console-consumer.sh \
--bootstrap-server "${BootstrapServerString}" \
--consumer.config "${KAFKA_CONFIG}"/client.properties \
--topic "${MSK_TOPIC}" \
--from-beginning /tmp/non-rack-aware-consumer.log 2>&1 &
Similar to before, this command will dump all the resulting logs into the file, rack-aware-consumer.log. You create a new file so there’s no overlap between the Kafka consumers you’ve run. There’s a lot of information in those logs, and we encourage you to open them and take a deeper look. If you want to see the rack awareness of your EKS pod in action, run the following command to tail the file to view fetch request results to the MSK cluster. You can observe a handful of meaningful logs to review here as the consumer access various partitions of the Kafka topic:
grep -E "DEBUG.*Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-[0-9]+" /tmp/rack-aware-consumer.log | tail -5
Observe your log output, which should look similar to the following:
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-5 at position FetchPosition{offset=527, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-4 at position FetchPosition{offset=509, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-3 at position FetchPosition{offset=527, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-2 at position FetchPosition{offset=522, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-1.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 1 rack: use1-az4)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-1 at position FetchPosition{offset=533, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-3.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 3 rack: use1-az2)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
[2025-03-13 00:47:51,695] DEBUG [Consumer clientId=console-consumer, groupId=console-consumer-86303] Added read_uncommitted fetch request for partition MSK-AZ-Aware-Topic-0 at position FetchPosition{offset=520, offsetEpoch=Optional[0], currentLeader=LeaderAndEpoch{leader=Optional[b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6)], epoch=0}} to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
For each log line, you can now observe two rack: values. The first rack: value shows the current leader, the second rack: shows the rack that is being used to fetch messages.
For example, look at MSK-AZ-Aware-Topic-5. The leader is identified as rack: use1-az4, but the fetch request is sent to use1-az6 as indicated by to node b-2.mskazaware.hxrzlh.c6.kafka.us-east-1.amazonaws.com:9098 (id: 2 rack: use1-az6) (org.apache.kafka.clients.consumer.internals.AbstractFetch)
You’ll notice something similar in all other log lines. The fetch is always to the broker in use1-az6, which maps to our expectation, given the pod we connected to was in this Availability Zone.
Congratulations! You’re consuming from the closest replica on Amazon EKS.
Clean Up
Delete the deployment when finished:
kubectl -n kafka-ns delete -f kafka-az-aware.yaml
To delete the EKS Pod Identity association:
eksctl delete podidentityassociation \
--cluster ${EKS_CLUSTER_NAME} \
--namespace kafka-ns \
--service-account-name kafka-sa
To delete the IAM policy:
aws iam delete-policy \
--policy-arn arn:aws:iam::"${AWS_ACCOUNT}":policy/MSK-AZ-Aware-Policy
To delete the EKS cluster:
eksctl delete cluster -n ${EKS_CLUSTER_NAME} --disable-nodegroup-eviction
If you followed along with this post using the Amazon MSK Data Generator, be sure to delete your deployment so it’s no longer attempting to generate and send data after you delete the rest of your resources.
Clean up will depend on which deployment option you used. To read more about the deployment options and the resources created for the Amazon MSK Data Generator, refer to Getting Started in the GitHub repository.
Creating an MSK cluster was a prerequisite of this post, and if you’d like to clean up the MSK cluster as well, you can use the following command:
aws kafka delete-cluster --cluster-arn "${MSK_CLUSTER_ARN}"
There is no additional cost to using AWS CloudShell, but if you’d like to delete your shell, refer to the Delete a shell session home directory in the AWS CloudShell User Guide.
Conclusion
Apache Kafka nearest replica fetching, or rack awareness, is a strategic cost-optimization technique. By implementing it for Amazon MSK consumers on Amazon EKS, you can significantly reduce cross-zone traffic costs while maintaining robust, distributed streaming architectures. Open source tools such as Kyverno can simplify complex configuration challenges and drive meaningful savings.The solution we’ve demonstrated provides a powerful, repeatable approach to dynamically injecting Availability Zone information into Kubernetes pods, optimize Kafka consumer routing, and minimize reduce transfer costs.
Additional resources
To learn more about rack awareness with Amazon MSK, refer to Reduce network traffic costs of your Amazon MSK consumers with rack awareness.
About the authors
 Austin Groeneveld is a Streaming Specialist Solutions Architect at Amazon Web Services (AWS), based in the San Francisco Bay Area. In this role, Austin is passionate about helping customers accelerate insights from their data using the AWS platform. He is particularly fascinated by the growing role that data streaming plays in driving innovation in the data analytics space. Outside of his work at AWS, Austin enjoys watching and playing soccer, traveling, and spending quality time with his family.
Austin Groeneveld is a Streaming Specialist Solutions Architect at Amazon Web Services (AWS), based in the San Francisco Bay Area. In this role, Austin is passionate about helping customers accelerate insights from their data using the AWS platform. He is particularly fascinated by the growing role that data streaming plays in driving innovation in the data analytics space. Outside of his work at AWS, Austin enjoys watching and playing soccer, traveling, and spending quality time with his family.
Farooq Ashraf is a Senior Solutions Architect at AWS, specializing in SaaS, Generative AI, and MLOps. He is passionate about blending multi-tenant SaaS concepts with Cloud services to innovate scalable solutions for the digital enterprise, and has several blog posts, and workshops to his credit.









 Austin Groeneveld is a Streaming Specialist Solutions Architect at Amazon Web Services (AWS), based in the San Francisco Bay Area. In this role, Austin is passionate about helping customers accelerate insights from their data using the AWS platform. He is particularly fascinated by the growing role that data streaming plays in driving innovation in the data analytics space. Outside of his work at AWS, Austin enjoys watching and playing soccer, traveling, and spending quality time with his family.
Austin Groeneveld is a Streaming Specialist Solutions Architect at Amazon Web Services (AWS), based in the San Francisco Bay Area. In this role, Austin is passionate about helping customers accelerate insights from their data using the AWS platform. He is particularly fascinated by the growing role that data streaming plays in driving innovation in the data analytics space. Outside of his work at AWS, Austin enjoys watching and playing soccer, traveling, and spending quality time with his family. Farooq Ashraf is a Senior Solutions Architect at AWS, specializing in SaaS, Generative AI, and MLOps. He is passionate about blending multi-tenant SaaS concepts with Cloud services to innovate scalable solutions for the digital enterprise, and has several blog posts, and workshops to his credit.
Farooq Ashraf is a Senior Solutions Architect at AWS, specializing in SaaS, Generative AI, and MLOps. He is passionate about blending multi-tenant SaaS concepts with Cloud services to innovate scalable solutions for the digital enterprise, and has several blog posts, and workshops to his credit.






































































 Kinnar Kumar Sen is a Sr. Solutions Architect at Amazon Web Services (AWS) focusing on Flexible Compute. As a part of the EC2 Flexible Compute team, he works with customers to guide them to the most elastic and efficient compute options that are suitable for their workload running on AWS. Kinnar has more than 15 years of industry experience working in research, consultancy, engineering, and architecture.
Kinnar Kumar Sen is a Sr. Solutions Architect at Amazon Web Services (AWS) focusing on Flexible Compute. As a part of the EC2 Flexible Compute team, he works with customers to guide them to the most elastic and efficient compute options that are suitable for their workload running on AWS. Kinnar has more than 15 years of industry experience working in research, consultancy, engineering, and architecture. Alex Lines is a Principal Containers Specialist at AWS helping customers modernize their Data and ML applications on Amazon EKS.
Alex Lines is a Principal Containers Specialist at AWS helping customers modernize their Data and ML applications on Amazon EKS. Mengfei Wang is a Software Development Engineer specializing in building large-scale, robust software infrastructure to support big data demands on containers and Kubernetes within the EMR on EKS team. Beyond work, Mengfei is an enthusiastic snowboarder and a passionate home cook.
Mengfei Wang is a Software Development Engineer specializing in building large-scale, robust software infrastructure to support big data demands on containers and Kubernetes within the EMR on EKS team. Beyond work, Mengfei is an enthusiastic snowboarder and a passionate home cook. Jerry Zhang is a Software Development Manager in AWS EMR on EKS. His team focuses on helping AWS customers to solve their business problems using cutting-edge data analytics technology on AWS infrastructure.
Jerry Zhang is a Software Development Manager in AWS EMR on EKS. His team focuses on helping AWS customers to solve their business problems using cutting-edge data analytics technology on AWS infrastructure.{kind=link}